Регулятор непрямого действия с гибкой отрицательной обратной связью
(РНД с ГООС)
Рисунок 5.5– Принципиальная схема РНД с ГООС
Регулятор состоит из центробежного измерителя частоты вращения, гидравлического сервомотора с отсечным золотником, изодрома и рычага, соединяющего муфту измерителя со штоком изодрома.
Уравнения динамики (движений) РНД с ГООС
 (5.5)
(5.5)
После преобразования уравнений (5.5) по Лапласу динамику РНД с ГООС можно представить в виде следующей структурной схемы.
Рисунок 5.6– Структурная схема РНД с ГООС
Уравнения динамики РНД с ГООС (5.5) можно представить в виде одного уравнения
 (5.6)
(5.6)
После преобразования по Лапласу уравнения (5.6) динамику РНД с ГООС можно представить следующей структурной схемой

Рисунок 5.7 – Структурная схема РНД с ГООС после преобразования
5.4 Система автоматического регулирования (САР) частоты вращения турбины
РНД без ОС
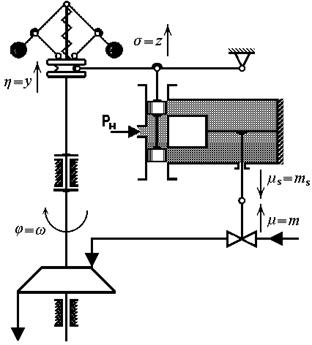
Рисунок 5.7 – Принципиальная схема САР частоты вращения турбины РНД без ОС
Уравнения динамики САР с РНД без ОС
 (5.7)
(5.7)
После преобразования уравнений (5.7) по Лапласу динамику САР с РНД без ОС можно представить в виде следующей структурной схемы
Рисунок 5.8 – Структурная схема регулирования частоты вращения турбины с РНД без ОС
Систему уравнений динамики (5.7) можно представить в виде одного дифференциального уравнения 4-го порядка относительно переменной 
 , (5.8)
, (5.8)
где:
 ;
;  ;
;  ;
;  ;
;  .
.
 ;
;  ;
;  .
.
За входную переменную в выражении (5.8) принято относительное изменение нагрузки на турбину  , за выходную переменную принято относительное изменение частоты вращения турбины .
, за выходную переменную принято относительное изменение частоты вращения турбины .
Устойчивость САР с уравнениями динамики (5.7), или уравнением (5.8), определяется по корням  характеристического уравнения
характеристического уравнения
 . (5.9)
. (5.9)
САР устойчива, если все корни уравнения (5.9) являются отрицательными (или с отрицательной вещественной частью в случае наличия комплексно-сопряженных корней).
Согласно условия А.Стодолы и условий А.Гурвица САР будет устойчива, если
 ,
,  ,
,  ,
,  ,
,  и
и  ,
,  .
.
После преобразования по Лапласу уравнение (5.8) можно представить следующей структурной схемой

Рисунок 5.9 – Структурная схема 1
Систему уравнений динамики (5.7) можно представить в виде другого дифференциального уравнения 4-го порядка относительно переменной 
 , где
, где  . (5.10)
. (5.10)
После преобразования по Лапласу уравнение (5.10) можно представить следующей структурной схемой

Рисунок 5.10 – Структурная схема 2
Систему уравнений динамики (5.7) можно представить в виде дифференциального уравнения 4-го порядка относительно переменной 
 . (5.11)
. (5.11)
После преобразования по Лапласу уравнение (5.11) можно представить следующей структурной схемой

Рисунок 5.11 – Структурная схема 3
Выражение, заключенное в структурных схемах в прямоугольнике между входной переменной и выходной переменной, называется передаточной функцией  и получается как отношение преобразованных по Лапласу выходной переменной к входной переменной при нулевых начальных условиях
и получается как отношение преобразованных по Лапласу выходной переменной к входной переменной при нулевых начальных условиях
 ;
;
 ;
;
 .
.
В знаменателе передаточной функции находится характеристический полином вида (5.9).
5.5 Система автоматического регулирования (САР) частоты вращения турбины
РНД с ЖООС
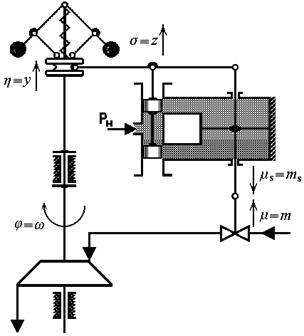
Рисунок 5.12 – Принципиальная схема регулирования частоты вращения турбины
с РНД с ЖООС
Уравнения динамики САР с РНД с ЖООС
 (5.12)
(5.12)
По уравнениям системы (5.12) после преобразования их по Лапласу динамику САР с РНД с ЖООС можно представить следующей структурной схемой
Рисунок 5.13 – Структурная схема регулирования частоты вращения турбины
с РНД с ЖООС
Считая входной переменой переменную , а выходной переменной переменную , систему уравнений динамики (5.7) можно представить в виде одного дифференциального уравнения 4-го порядка
 ,
,
где:
 ;
;
 ;
; 
 ;
; 
 ;
;  .
.
 .
.
Считая входной переменой переменную , а выходной переменной переменную , систему уравнений динамики (5.7) можно представить в виде дифференциального уравнения
.
Система будет устойчивой, если для значений ее коэффициентов выполняются условия
, , , , и , .
5.6 Система автоматического регулирования (САР) частоты вращения турбины
РНД с ГООС
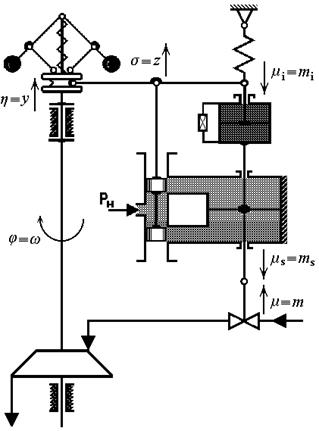
Рисунок 5 – Принципиальная схема регулирования частоты вращения турбины
с РНД с ГООС
Уравнения динамики САР с РНД с ГООС
 (5.13)
(5.13)
По уравнениям системы (5.13) после преобразования их по Лапласу динамику САР с РНД с ГООС можно представить следующей структурной схемой
Рисунок 6 – Структурная схема регулирования частоты вращения турбины
с РНД с ГООС
Считая входной переменой переменную , а выходной переменной переменную , систему уравнений динамики (5.13) можно представить в виде одного дифференциального уравнения 5-го порядка
 , (5.14)
, (5.14)
где:
 ;
;  ;
;
 ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
 ;
;
 .
.
После преобразования по Лапласу уравнение (5.14) можно представить следующей структурной схемой

Считая входной переменой переменную , а выходной переменной переменную  , систему уравнений динамики (5.13) можно представить в виде дифференциального уравнения 5-го порядка
, систему уравнений динамики (5.13) можно представить в виде дифференциального уравнения 5-го порядка
 . (5.15)
. (5.15)
После преобразования по Лапласу уравнение (5.15) можно представить следующей структурной схемой

Устойчивость САР с РНД с ГООС (отсутствие в характеристическом полиноме нулевых корней и положительных корней, или комплексно-сопряженых корней с положительной (или нулевой) вещественной частью) будет определяться выполнением следующих условий:
, , , , ,  и
и
,  ,
,  .
.
Дата добавления: 2022-05-27; просмотров: 74;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
