Характеристика производства как объекта управления
На производственном предприятии происходит сложный процесс превращения сырья и материалов в готовую продукцию. Осуществление этого процесса требует выполнения ряда разнообразных функций, совокупность которых принято назы-вать производственно-хозяйственной деятельностью предприятия. Основными производственно-хозяйственными функциями являются: производство готовой продукции, вспомогательного оборудования, инструментов; выполнение ремонт-ных работ; техническая подготовка производства; материально-техническое обес-печение; организационно-трудовая подготовка производства; финансово-бухгал-терская деятельность; реализация готовой продукции.
Центральным звеном предприятия служит основное производство, где осущест-вляется процесс получения готовой продукции. Производственный процесс пред-ставляет собой совокупность технологических процессов, которые в свою очередь состоят из технологических операций.
Структура и тип производственного предприятия определяется типом основных технологических процессов. Различают непрерывные, дискретные и дискретно-не-прерывные производства. В целлюлозно-бумажной промышленности большинство технологических процессов являются непрерывными.
Объединение всех технологических процессов производства готовых продуктов называется технологией производства, а связь между технологическими процесс-сами или операциями – технологической схемой. Совокупность параметров всех технологических процессов представляет собой технологический режим. Целью технологического процесса является получение готового продукта с заданными свойствами путём изменения технологического режима.
1.3. Задачи управления производством
Производственное предприятие как система управления состоит из управляющей и управляемой подсистем, связанных между собой каналами передачи информа-ции. Цель управления предприятию в целом задаётся вышестоящей организацией в виде основных плановых и технико-экономических показателей. Для осуществле-ния производственных функций предприятию выделяются трудовые, финансовые и материальные ресурсы. Величина каждого вида ресурсов ограничена. В рамках этих ограничений предприятие может маневрировать ресурсами, распределяя их между подразделениями с целью достижения наилучших технико-экономических результатов.
Сложные системы управления строятся, как правило, по иерархическому принци-пу. В зависимости от структуры предприятия в производственной системе можно выделить два уровня управления. Нижний уровень иерархии состоит из систем уп-равления технологическими процессами, верхний – из системы управления пред-приятием.
Задачу управления технологическим процессом можно сформулировать следую-щим образом: найти такое состояние технологического процесса (технологический режим) и такое управляющее воздействие, которые удовлетворяют цели управле-ния при заданных ограничениях.
Система управления предприятием относится к организационно–экономическим системам управления. Цель управления заключается в организации системного функционирования цехов для выпуска готовой продукции в заданном количестве при заданных технико-экономических систем от систем управления технологи-ческими процессами состоит в характере объекта управления. Если в системах управления технологическими процессами объектом управления служит отдель-ный технологический процесс, то в организационно–экономических системах – это коллективы людей, взаимодействующие с технологическим оборудованием, а так-же осуществляющие технологическую подготовку производств. Основой функции-онирования организационно–экономических систем являются экономические и со-циальные законы.
Г л а в а 2
АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
2.1. Классификация автоматических систем управления
2.1.1. Основные определения
Техническое устройство, с помощью которого осуществляется автоматическое управление объектом, называется управляющим устройством. Совокупность объек-та управления и управляющего устройства образует автоматическую систему уп-равления (САУ), функциональная схема которой, приведена на рис.1.
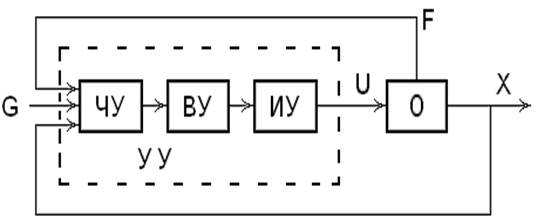
Рис. 1. Функциональная схема САУ
Состояние объекта управления Охарактеризуется выходной величиной Х. В общем случае выходных величин несколько и тогда состояние объекта харак-теризуется вектором  , координатами которого являются отдельные выходные величины. От управляющего устройства УУ на вход объекта поступает управ-ляющее воздействие U.
, координатами которого являются отдельные выходные величины. От управляющего устройства УУ на вход объекта поступает управ-ляющее воздействие U.
Помимо управляющего воздействия, к объекту приложено также возмущающее воздействие (помеха) F. На вход управляющего устройства подаётся задающее воздействие G, содержащее информацию о цели управления.
Управляющее устройство УУ состоит из чувствительного устройства ЧУ, вы-числительного устройства ВУ и исполнительного устройства ИУ. Чувствии-тельные устройства служат для измерения переменных Х, G, F. Вычислительное устройство реализует алгоритмы работы управляющего устройства, соответству-ющим образом перерабатывая входную информацию. Исполнительные устройства предназначены для непосредственного управления объектом, т.е. изменения его состояния.
2.1.2. Основные типы
автоматических систем управления
В общем случае на управляющее устройство поступают три вида информации: информация о величине G, задающей цель управления, информация о F – возму-щениях, нарушающих режим работы объекта. Однако возможны САУ, в которых используется лишь часть информации. При этом в зависимости от видов исполь-зуемой информации различают два основных типа САУ – разомкнутые и замкну-тые.
В разомкнутых САУ выходная величина объекта Х не измеряется. Разомкнуты-ми также системы называются потому, что в них отсутствует обратная связь между выходом объекта и входом управляющего устройства. Возможны разомкнутые САУ, в которых управляющее устройство использует только одно задающее воз-действие G, одно возмущение F и, наконец, оба эти сигнала.
В первом варианте разомкнутой САУ управление осуществляется по задающему воздействию. Точность соответствия между Х и G при этом целиком определяет-ся постоянством параметров системы, поэтому такие системы пригодны при ста-бильных параметрах системы и невысоких требованиях к точности.
Вторым вариантом разомкнутой САУ являются системы управления по возму-щению, или системы автоматической компенсации. Такие системы применяются, когда задача управления сводится к стабилизации выходной величины Х.
Система управления по задающему и возмущающему воздействиям является наи-более полным видом разомкнутой САУ. В этом случае управление осуществляется в функции двух величин G и F.
Разомкнутые САУ имеют невысокою точность управления, вопервых вследствие невозможности охватить компенсацией все возмущения, действующие на систему, и, вовторых, из-за изменения во времени параметров системы.
В замкнутых САУ на вход управляющего устройства подаются задающее воз-действие G и выходная величина объекта Х. В такой САУ управляющее ус-тройство стремиться ликвидировать все отклонения Х от задания G независимо от причины их возникновения. Замкнутые САУ называются системами с обратной связью, или системами управления по отклонению. Эти САУ обеспечивают высо-кую точность управления.
Комбинированные САУ представляют собой объединение в одну систему зам-кнутой системы управления по отклонению и разомкнутой по внешнему воздей-ствию.
Частным видом САУ являются автоматические системы регулирования (АСР), АСР – это САУ обеспечивающая равенство Х и G ( Х = G ). В зависимости от характера задающего воздействия АСР делятся на три вида: системы стабилиза-ции, системы программного регулирования и следящие системы.
В системах стабилизации задающее воздействие постоянно, в системах програм-много регулирования оно изменяется по заранее заданному закону, в следящих сис-темах оно тоже изменяется по заранее заданному закону, в следящих системах оно тоже изменяется, но закон изменения заранее не известен. Управляющее устрой-ство в АСР называется регулятором, а выходная величина – регулируемой вели-чиной.
По виду характеристик САУ делятся на линейные и нелинейные. Линейные сис-темы описываются линейными уравнениями, а нелинейные – нелинейными. Для линейных систем справедлив принцип суперпозиции, согласно которому реакция системы на любую комбинацию внешних воздействий равна сумме реакций на каждое из этих воздействий порознь. Для упрощения исследования нелинейных систем производится их линеаризация, т.е. приближённое описание их линейными уравнениями.
САУ бывают стационарными и нестационарными. Стационарной называется сис-тема, все параметры которой не изменяются во времени. Нестационарная система – это система с переменными параметрами. Коэффициенты математической модели нестационарной системы являются функциями времени. Пример нестационарной системы – САУ ракетой, масса которой изменяется вследствие расхода топлива.
В зависимости от характера действия составляющих систему звеньев САУ делят-ся на непрерывные и дискретные. Непрерывная система состоит из звеньев непре-рывного действия, т.е. звеньев, выходная величина которых изменяется плавно при плавном изменении входной величины. Дискретная САУ содержит хотя бы одно звено релейного действия, когда ступенчатые изменения выходной величины про-исходят при прохождении входной величины определенных пороговых значений, или импульсного, когда ступенчатые изменения происходят через определённый интервал времени.
Оптимальные САУ – это системы, в которых обеспечено оптимальное значение какого-либо показателя качества работы системы, называемого критерием опти-мальности. Адаптивные, или самоприспосабливающиеся, системы обладают спо-собностью приспосабливаться к изменению внешних условий работы.
2.2. Характеристика и методика исследования
автоматических систем управления
Целью теории автоматического управления является решение задачи анализа системы и задачи её синтеза. В первом случае имеется готовая система и требуется определить её свойства; во втором – наоборот, задаются свойства, которыми дол-жна обладать система, и необходимо создать систему, удовлетворяющую этим тре-бованиям.
Исследование САУ в обоих случаях включает математическое описание систе-мы и анализ поведения системы в статическом и динамическом режимах.
2.2.1. Математическое описание элементов
автоматических систем управления
Математическое моделирование – один из методов технической кибернетики, яв-ляющейся наукой, изучающей системы, способные воспринимать, хранить и пере-рабатывать информацию. Методы математического моделирования позволяют опи-
сывать одинаковыми формулами различные по своей природе процессы. Эффек-тивность использования математических моделей определяется тем, насколько пра-вильно они отражают количественные и качественные характеристики моделиру-емых объектов, т.е. адекватностью моделей. Метод математического моделирова-ния дополняет метод физического моделирования возможностью количественной априорной оценки исследуемых явлений.
Различают математические модели статические и динамические. Статической мо-делью называется зависимость выходного параметра от входного в установив-шемся режиме. Статические модели описываются алгебраическими уравнениями. Динамические модели изображают закон изменения выходного параметра во вре-мени при изменении входного воздействия. Динамические модели описываются в виде дифференциальных уравнений.
Если переменные объекта изменяются только во времени, то модели, описываю-щие свойства такого объекта, называются моделями с сосредоточенными парамет-рами. Модели объектов, переменные которых изменяются как во времени, так и по координатам аппарата, называются моделями с распределёнными параметрами. Динамические характеристики объектов с сосредоточенными параметрами описы-ваются обыкновенными дифференциальными уравнениями, а с распределёнными – дифференциальными уравнениями в частных производных.
Различают три метода математического моделирования: аналитический, экспери-ментальный и экспериментально-аналитический.
Аналитический метод основан на количественной и качественной оценках процессов, происходящих в моделируемом объекте. Аналитические модели базиру-ются на общих физических законах и механизмах процессов, происходящих в объ-екте. При составлении аналитических моделей не требуется проведения экспери-ментов на объекте. Это свойство позволяет использовать аналитический метод мо-делирования ещё на стадии проектирования.
Экспериментальные методы моделирования делятся на активные и пассив-ные. При активных методах на вход исследуемого объекта подаются сигналы опре-делённого вида и фиксируются изменения выходных переменных. Полученные эк-спериментальные данные аппроксимируются аналитическими математическими моделями. При пассивных методах используются статистические приёмы обработ-ки экспериментальных данных, полученных в процессе нормальной эксплуатации исследуемого объекта.
При использовании экспериментально-аналитического метода вначале соста-вляется аналитическая модель объекта, а в дальнейшем проводятся эксперименты на конкретном объекте с целью определения коэффициентов уравнений.
Аналитические модели. В качестве примера аналитического моделирования выведем уравнение ёмкости как объекта регулирования уровня. Расчётная схема ёмкости приведена на рис. 2. Составим уравнение материального баланса. Количество жидкости, находящейся в объёме ёмкости, равно разности расходов со стороны притока и стока
G = (GПР – GCT ).t , (2.1)
где G – количество жидкости в объёме ёмкости, м3; GПР ,GСТ– расходы жид-кости на притоке и стоке соответственно, м3/с ; t– время, с.
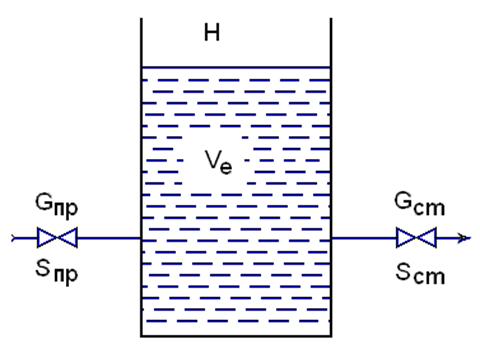
Рис. 2. Расчётная схема ёмкости
Продифференцировав по t, получим

 . (2.2)
. (2.2)
Запишем уравнение (2.2) в приращениях
 . (2.3)
. (2.3)
Уравнение (2.3) – дифференциальное уравнение материального баланса.
Выразим члены уравнения (2.3) через технологические параметры и конструк-тивные размеры ёмкости.
Объёмное количество жидкости в ёмкости равно
G = VE = HFE, (2.4)
где VЕ – объём части ёмкости, занятой жидкостью, м3, Н – уровень жидкости в ёмкости, м; FЕ – сечение ёмкости, м2.
Поскольку FЕ = const, то в приращениях уравнение (2.4) можно записать в виде
 . (2.5)
. (2.5)
Расход жидкости на притоке зависит от степени открытия клапана и от перепада давления на нём. Полагая давление перепад клапаном постоянным, можно записать
GПР = GПР ( SПР , H ), (2.6)
где SПР – степень открытия клапана на притоке.
Разлагая зависимость (2.6) в рад Тейлора и ограничиваясь линейным приближе-нием, т.е. отбрасывая члены высшего порядка малости, в приращениях получим
 GПР = K1 SПР – K2 H,(2.7)
GПР = K1 SПР – K2 H,(2.7)
где коэффициенты пропорциональности определяются из статических характерис-тик объекта в соответствии с выражениями
K1=  ;K2=
;K2=  . (2.8)
. (2.8)
Знак минус в уравнении (2.7) означает, что с увеличением уровня Н расход GПР уменьшается.
Рассуждая аналогично, для изменения расхода жидкости на стоке можно записать
GСТ = GСТ (SСТ , H), (2.9)
где SСТ – степень открытия клапана на стоке.
При этом полагаем, что давление после клапана на линии стока постоянно
GСТ = K3  SCT + K4 H, (2.10)
SCT + K4 H, (2.10)
где
К3 =  ; К4=
; К4=  ; (2.11)
; (2.11)
К3 , К4 – частные производные GСТ по соответствующим параметрам, определяе-мые из статических характеристик.
Зависимость расходов на притоке и стоке от уровня в соответствии с уравнения-ми (2.6) и (2.9) указывает на то, что данный объект обладает свойством самовы-равнивания на притоке и стоке. Самовыравнивание – свойство объекта самостоя-тельно приходить к новому установившемуся состоянию после нанесения возму-щения.
Подставляя значения G , GПР , GСТ из уравнений (2.5) , (2.7) , (2.10) в уравнение (2.3) получим
Fe  = K1 SПР – К2 Н – К3 SСТ – К4 Н . (2.12)
= K1 SПР – К2 Н – К3 SСТ – К4 Н . (2.12)
После приведения подобных, переноса Н в левую часть и деления всех членов на коэффициент при Н, получим
 + H =
+ H =  SПР –
SПР –  SСТ , (2.13)
SСТ , (2.13)
или
Т + Н = КY SПР – КВ SСТ , (2.14)
где Т =  – постоянная времени ёмкости, с; KY = , KB = – коэффициенты усиления ёмкости по каналам управления и возмущения.
– постоянная времени ёмкости, с; KY = , KB = – коэффициенты усиления ёмкости по каналам управления и возмущения.
Уравнение (2.14) – дифференциальное уравнение ёмкости в приращениях.
Предположим для определённости, что управление осуществляется с помощью клапана на притоке, а нагрузка (возмущение) задаётся с помощью клапана на стоке. Тогда KY и KB – коэффициенты усиления относительно управляющего и возмущающего воздействий соответственно.
Конечной целью математического описания является построение структурной схе-мы объекта. Для этого перейдём к символической форме записи уравнения (2.14). Положим  = ри для упрощения отбросим знак .Тогда получим
= ри для упрощения отбросим знак .Тогда получим
(Tp + 1) H = KY SПР – KВ SСТ , (2.15)
отсюда
H =  SПР –
SПР –  SСТ . (2.16)
SСТ . (2.16)
В соответствии с выражением (2.16) строим структурную схему ёмкости (рис. 3).
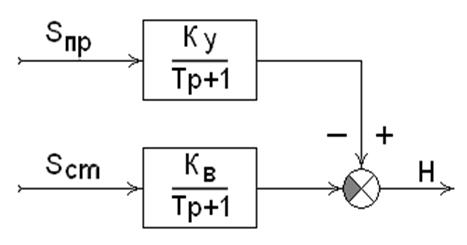
Рис. 3. Структурная схема ёмкости
Экспериментальные модели. Определение характеристик объектов по данным экспериментальных исследований называется идентификацией. Эксперименталь-ный метод определения динамических характеристик объекта заключается в сня-тии переходных функций и аппроксимации их решением дифференциального урав-нения.
Переходные характеристики– одна из форм описания динамических свойств САУ. Эти характеристики могут быть сняты экспериментально или построены по уравнению звена.
Переходная, или временная, характеристика звена представляет собой реакцию на выходе звена, вызванную подачей на его вход единичного ступенчатого воздей-ствия. На рис. 4, априведены три различных вида переходных характеристик, со-ответствующих различным типам звеньев.
Переходная характеристика обозначается h(t). Единичное ступенчатое воздей-ствие обозначается 1(t)и может быть задано в виде
1(t) =  (2.17)
(2.17)
Наряду с переходной характеристикой применяется импульсная переходная (вре-менная) характеристика, или весовая функция. Эта характеристика представляет собой реакцию звена на единичный импульс. Единичный импульс, или дельта–функция – это импульс, площадь которого равна единице при длительности, рав-ной нулю, и высоте, равной бесконечности. На рис. 4, б изображены типичные формы импульсных переходных характеристик. Импульсная переходная харак-теристика обозначается  , единичный импульс -
, единичный импульс -  . Математически дельта-функцию можно записать так
. Математически дельта-функцию можно записать так
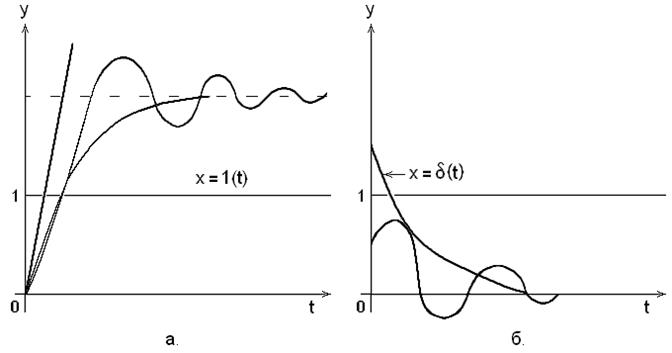
Рис. 4. Переходные характеристики
 (t) =
(t) =  (2.18)
(2.18)
при этом, согласно определению
 (t) dt = 1. (2.19)
(t) dt = 1. (2.19)
Между переходной и весовой функциями существует однозначная зависимость
 (t) = h/(t) ,(2.20)
(t) = h/(t) ,(2.20)
h(t) = 
 (t)dt .(2.21)
(t)dt .(2.21)
Зная переходную, или весовую, функцию, можно определить реакцию звена на произвольное входное воздействие при нулевых начальных условиях с помощью интеграла Дюамеля
y(t) = ( t –  )
)  x( ) dt ,(2.22)
x( ) dt ,(2.22)
где – ширина (длительность) импульсов.
Аппроксимация переходных функций решением дифференциального уравнения может производится аналитическими методами и графически.
Рассматривая ёмкость только по каналу управления, из уравнения (2.14) получим
Т  + Н = KУ SПР .(2.23)
+ Н = KУ SПР .(2.23)
Для получения переходной функции проинтегрируем уравнение (2.23)
Н = KУ SПР ( 1 – е –t/T ) .(2.24)
Таким образом, переходная функция представляет собой экспоненту (рис.5).
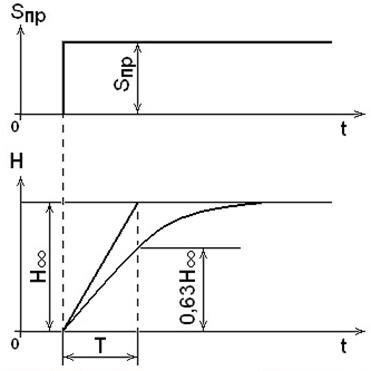
Рис. 5. Переходная характеристика ёмкости
Новое установившееся значение уровня может быть получено из уравнения (2.24) при t 

H = KY SПР (1 – е-  ) = KY SПР .(2.25)
) = KY SПР .(2.25)
Постоянная времени Т определяется как проекция на ось времени отрезка каса-тельной, заключённого между точкой касания и линией установившегося значения регулируемой величины. Эта величина постоянна для данной экспоненты. Если в уравнении экспоненты положить t = T , то получим
H = KУ SПР (1 – e  ) = 0,63 KУ SПР .(2.26)
) = 0,63 KУ SПР .(2.26)
Следовательно, за время Т регулируемая величина достигает 63%своего уста-новившегося значения. Коэффициент усиления объекта определяется из уравнения (2.25) по формуле
KУ = H / SПР .(2.27)
2.2.2. Частотные характеристики
Комплексные числа.Комплексным числом называется выражение вида
z =  + j
+ j  , (2.28)
, (2.28)
где – вещественная часть комплексного числа; – мнимая часть комплекс-ного числа; j =  .
.
Если = 0, то комплексное число называется чисто мнимым. При = 0 комплексное число становится вещественным. Комплексные числа изображаются на комплексной плоскости (рис.6).
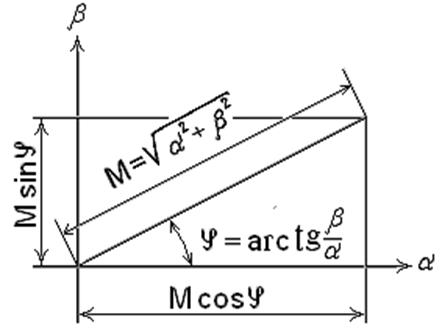
Рис. 6. Изображение комплексного числа на плоскости
Длина вектора М называется абсолютной величиной комплексного числа, или модулем
М =  . (2.29)
. (2.29)
Угол между положительным направлением вещественной оси и вектором  на-зывается аргументом, или фазой
на-зывается аргументом, или фазой
 = arc tg
= arc tg  .(2.30)
.(2.30)
Абсцисса и ордината комплексного числа могут быть выражены так
= М cos  , (2.31)
, (2.31)
= M sin .(2.32)
Отсюда
+ j = M (cos + j sin ) .(2.33)
По формуле Эйлера cos + j sin = e  . (2.34)
. (2.34)
Поэтому + j = M e , (2.35)
или + j =  e
e  .(2.36)
.(2.36)
Операционное исчисление.Операционное исчисление служит для упрощения математических операций при расчётах, в частности при дифференцировании и ин-тегрировании. Решение уравнений операционным методом состоит из трёх этапов: приведение исходных уравнений к операторной форме; решение операторных уравнений; определение решений исходных уравнений по решениям операторных уравнений.
Для получения операторных уравнений, функции, входящие в уравнение, подвер-гаются прямому преобразованию Лапласа в соответствии с выражением
F(p) = L [f(t)] =  e
e  f(t) dt .(2.37)
f(t) dt .(2.37)
Функция f(t) вещественного переменного t, подвергаемая прямому преобразо-ванию Лапласа, называется оригиналом, а функция F(p) комплексного переменно-го p, получаемая в результате преобразования, называется изображением.
Основными свойствами преобразования Лапласа являются:
а) линейность – если f(t)  F(p) , (2.38)
F(p) , (2.38)
то Q f(t)  Q F(p) ;
Q F(p) ;
б) интегрирование оригинала –  (t) dt
(t) dt  F(p), (2.39)
F(p), (2.39)
т.е. интегрированию оригинала соответствует деление изображения на оператор p;
в) дифференцирование оригинала –  p F(p) , (2.40)
p F(p) , (2.40)
т.е. дифференцированию оригинала соответствует умножение изображения на оператор p;
г) дифференцирование n – кратное – 
 p
p  F(p) ;(2.41)
F(p) ;(2.41)
д) запаздывание в области вещественного переменного –
– f (t – ) e  F(p) , (2.42)
F(p) , (2.42)
т.е. сдвигу в области вещественного переменного на соответствует умножение изображения на e .
Далее из операторных уравнений определяется изображение решения поставлен-ной задачи. Чтобы отыскать решение исходных уравнений, необходимо совершить переход от изображения решения к его оригиналу. Этот переход возможен с по-мощью обратного преобразования Лапласа
f(t) = L [F(p)] = 
 F(p)e
F(p)e  dp .(2.43)
dp .(2.43)
При вычислении преобразований Лапласа часто используют специальные табли-цы.
Передаточная функция.Передаточной функцией W(p) динамической систе-мы называется отношение изображений Лапласа выходной и входной величин при нулевых начальных условиях
W(p) =  . (2.44)
. (2.44)
Передаточная функция является одним из способов задания динамических харак-теристик САУ. Она однозначно связана с дифференциальным уравнением системы
an  + an-1
+ an-1  + … + a1
+ … + a1  + a0 y (t) =
+ a0 y (t) =
= bm  + bm-1
+ bm-1  + … + b1
+ … + b1  + b0x (t).(2.45)
+ b0x (t).(2.45)
Дифференциальному уравнению (2.45) соответствует передаточная функция вида
W(p) =  (2.46)
(2.46)
при n  m.
m.
Так, дифференциальному уравнению ёмкости (2.23) соответствует передаточная
функция W(p) =  .(2.47)
.(2.47)
Передаточная функция связана с весовой функцией соотношением
W(p) = L[ (t)] ,(2.48)
т.е. передаточная функция есть изображение весовой функции.
Частотные характеристики.Частотные характеристики описывают установив-шиеся колебания на выходе звена, вызванные гармоническим воздействием на вхо-де. Если на вход звена подать гармоническое воздействие вида
x = x  sin t ,
sin t ,
то по окончании переходного процесса на выходе звена установятся колебания ви-да
y = y sin( t+  ) ,
) ,
т.е. отличающиеся от входных по амплитуде и фазе.
Амплитуднойчастотной характеристикой (АЧХ) называется зависимость отно-шения амплитуды гармонических колебаний на выходе к амплитуде колебаний на входе звена от частоты, т.е. зависимость вида А( ).
Фазовой частотной характеристикой (ФЧХ) называется зависимость разности фаз между выходными и входными гармоническими колебаниями от частоты этих колебаний, т.е. зависимость вида ( ).
АЧХ и ФЧХ можно объединить в одну характеристику – амплитудно-фазовую частотную характеристику (АФЧХ)
W(j ) = A( )e  . (2.49)
. (2.49)
Из уравнения (2.49) следует, что модуль АФЧХ представляет собой АЧХ, а аргумент – ФЧХ.
Аналитические выражения для частотных характеристик могут быть получены по передаточной функции. Если в уравнении передаточной функции (2.46) положить p = j , то получим АФЧХ
 =
=  .(2.50)
.(2.50)
После освобождения от мнимости в знаменателе уравнение (2.50) можно запи-сать в виде
W(j ) = U(  ) + jV( ) .(2.51)
) + jV( ) .(2.51)
Функция U( ) называется действительной (вещественной) частотной характе-ристикой, а V( ) – мнимой частотной характеристикой. Между частотными харак-теристиками существует связь
А( ) =  ; (2.52)
; (2.52)
( ) = arc tg  ; (2.53)
; (2.53)
U( <
Дата добавления: 2021-04-21; просмотров: 200;
Поиск по сайту
Узнать еще
- API как средство интеграции приложений.
- B. Департаменты и управления функционального характера.
- I. Общая характеристика категории состояния как часть речи
- II. Лексико-грамматические разряды имен числительных. Их характеристика.
- II. Лексико-грамматические разряды местоимений. Их общая характеристика
- IP как протокол без установления соединения
- IV. ОБЩАЯ ХАРАКТЕРИСТИКА ВИРУСОВ
- MatLab как научный калькулятор

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
