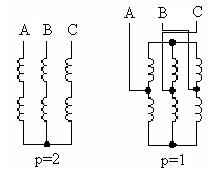
Схема соединения секций обмоток Y-YY

 |  |
3. Схема соединения секций обмоток Δ-YY
Рис. 5.12. Схемы соединения обмоток и соответствующие
им механические характеристики
Моменты, развиваемые Д при различных схемах соединения обмоток, относятся как соответствующие магнитные индукции:
 .
.
Данный способ прост, позволяет получить жёсткие механические характеристики, экономичен (машина работает в номинальном режиме).
Недостатком является ступенчатость регулирования.
Как видно из рис. 5.12 и таблицы 5.1, в зависимости от характера нагрузки (вентиляторная, с постоянным моментом, с постоянной мощностью) можно выбрать соответствующую схему соединения обмоток.
Промышленность выпускает 2-х, 3-х и 4-х скоростные двигатели. В 2-х скоростных двигателях на статоре только одна переключаемая обмотка и число полюсов изменяется в два раза.
Таблица 5.1.
Соотношение магнитных индукций при разных схемах
| № | 
| 
| |||
| схе-мы | соединение полуобмоток | соединение фаз | соединение полуобмоток | соединение фаз | 
|
| последователь-ное | звезда Y | параллельное | треугольник ∆ | 
| |
| последователь-ное | звезда Y | параллельное | двойная звезда YY | 
| |
| последователь-ное | треугольник ∆ | параллельное | двойная звезда YY | 
|
Торможение асинхронных двигателей.Торможение АД можно осуществить как при питании от сети переменного тока, так и путем включения в цепь статора источника постоянного тока. Кроме того, для подтормаживания Д используют режим самоторможения [9].
При включении АД по основной схеме может быть осуществлено торможение противовключением и рекуперативное торможение.
1. Торможение противовключением.
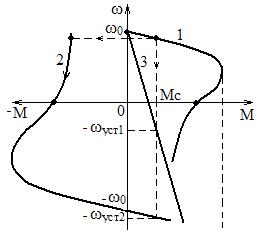
Рис. 5.13. Механические характеристики АД
при торможении противовключением
Этот режим можно осуществить двумя путями:
1) изменяя порядок чередования фаз. В этом случае направление вращения магнитного поля меняется на противоположное и Д с естественной характеристики 1 переходит на тормозную характеристику 2, расположенную во втором квадранте. В момент, когда частота вращения становится близкой к нулю, Д необходимо отключить от сети. В противном случае он реверсируется.
2) нагружая Д активным моментом, при введении в цепь ротора большого добавочного сопротивления. В этом случае вращающий момент нагрузки оказывается больше движущего момента Д. Поскольку они направлены в разные стороны, то Д переходит на работу по характеристике 3, и новое установившееся значение скорости будет соответствовать противоположному направлению вращения Д, то есть имеем спуск груза с подтормаживанием за счет включенного на подъем Д.
 |
2.Рекуперативное торможение.
Рис. 5.14. Механические характеристики АД
при рекуперативном торможении
Рекуперативное торможение самое экономичное, поскольку Д включается параллельно с сетью и работает в режиме генератора, то есть энергия, затрачиваемая на торможение, возвращается обратно в сеть. Это торможение имеет место тогда, когда частота вращения выше синхронной. На практике этот метод широко используется в многоскоростных Д при переходе с большей скорости на меньшую, а также при уменьшении частоты питающего напряжения в системе преобразователь частоты - двигатель.
3. Динамическое торможение.

|
|
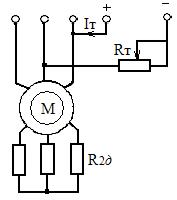
Рис. 5.15. Динамическое торможение АД: а) схема включения АД;
б) механические характеристики АД
Для осуществления этого режима обмотку статора отключают от сети и в две фазы статора подают постоянный ток. В результате ротор вращается в неподвижном магнитном поле. При этом цепь ротора может быть закорочена, либо в нее может быть введено  . Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как
. Возникает тормозной момент, который и тормозит двигатель. Электромеханическую характеристику Д в режиме динамического торможения можно получить из схемы замещения. Она располагается в первом квадранте (кривая 1), скольжение в режиме динамического торможения определяется как  . Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра
. Форма тормозной характеристики и величина тормозного момента зависят от схемы соединения обмоток. Кроме того, вид характеристики определяется величиной тормозного тока и, следовательно, сопротивлением потенциометра  . При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
. При одном и том же значении можно получить различные характеристики (кривые 2 и 4). Следует иметь в виду, что момент будет пропорционален квадрату тока. При постоянном тормозном токе, изменяя , получим другое семейство характеристик (кривые 2 и 3).
Этот режим получил большое распространение.
Недостатком этого способа является уменьшение тормозного момента до нуля при снижении скорости до нуля.
4. Торможение АД при самовозбуждении.
Этот вид торможения основан на том, что после отключения АД от сети его электромагнитное поле затухает не мгновенно. Если использовать энергию этого затухающего поля, то можно обеспечить самовозбуждение Д и осуществить тормозной режим. На практике используют два способа торможения с самовозбуждением: конденсаторное и магнитное торможение.
 а) б)
а) б)

Рис. 5.16. Конденсаторное торможение АД: а) схема включения АД;
б) механические характеристики АД
При конденсаторном торможении самовозбуждение осуществляется за счет включения в цепь статора конденсаторов. Причем конденсаторы могут подключаться постоянно (глухое включение) или при помощи контактора. Увеличение емкости конденсаторов приводит к смещению вниз и влево характеристик. При отключении двигателя накопленная в электрическом поле энергия самовозбуждает его, что приводит к появлению тормозного момента.
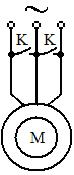
Рис. 5.17. Схема включения АД при магнитном торможении
Магнитное торможение. В настоящее время с использованием тиристорных коммутирующих устройств и тиристорных регуляторов напряжения широкое распространение получило магнитное торможение. Этот способ реализуется при отключении Д от сети и закорачивании обмоток статора контактором  . При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
. При этом появляется электрическая цепь и за счет запасенной в Д электромагнитной энергии осуществляется самовозбуждение Д.
Особенностью этого способа является быстротечность, которая определяется небольшим временем затухания магнитного поля. Обычно этот режим осуществляется в сочетании с режимом динамического торможения. Такое комбинированное торможение реализуется с помощью тиристорных пускорегулирующих устройств.
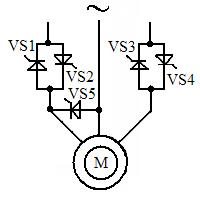
Рис. 5.18. Схема включения АД при комбинированном торможении
При отключении Д от сети тиристоры  закрыты, сигнал подается на
закрыты, сигнал подается на  и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например
и он замыкает обмотку статора, осуществляя магнитное торможение. Спустя короткое время закрывается , открывается один из тиристоров коммутирующей группы , например  . В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
. В результате в одну из обмоток статора подается выпрямительный ток и осуществляется динамическое торможение до остановки Д.
Асинхронные исполнительные двигатели

|
|
 |
Рис. 5.19. Двухфазный двигатель: а) схема включения;
б) механические характеристики
Исполнительные двигатели отличаются от обычных двухфазных. К исполнительным Д предъявляют следующие требования:
1) отсутствие самохода при отсутствии сигнала в обмотке управления;
2) линейность механических и регулировочных характеристик;
3) малая инерционность;
4) минимальное напряжение троганья;
5) надежность и экономичность способов управления;
6) возможность работы на упор.
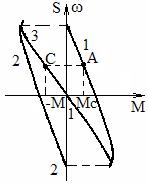
Рис. 5.20. Механические характеристики двухфазного
исполнительного двигателя
Обычный двухфазный Д имеет нелинейный рабочий участок и работает при малых скольжениях (точка  ) (рис. 5.19). При отключении обмотки управления Д переходит в точку
) (рис. 5.19). При отключении обмотки управления Д переходит в точку  характеристики 3 и продолжает вращаться (то есть имеется самоход, что недопустимо). Для исключения самохода исполнительные Д имеют большое сопротивление ротора, что обуславливает большое критическое скольжение (
характеристики 3 и продолжает вращаться (то есть имеется самоход, что недопустимо). Для исключения самохода исполнительные Д имеют большое сопротивление ротора, что обуславливает большое критическое скольжение (  ), то есть характеристика будет выглядеть как на рис. 5.20.
), то есть характеристика будет выглядеть как на рис. 5.20.
При отключении обмотки управления Д переходит в точку  характеристики 3 и мгновенно останавливается. Самоход отсутствует, за счет большого сопротивления характеристика почти линейна.
характеристики 3 и мгновенно останавливается. Самоход отсутствует, за счет большого сопротивления характеристика почти линейна.
Увеличение сопротивления ротора снижает КПД двигателя и пусковой момент, уменьшается пусковой ток. Уменьшение пускового тока является положительным фактором, так как допускает эксплуатацию двигателя при неподвижном роторе, т. е. в режиме короткого замыкания (ток короткого замыкания не превышает номинального).
Управление таким двигателем может осуществляться тремя способами: амплитудным; фазовым; амплитудно-фазовым (самое распространенное).
Важную роль у исполнительных двигателей играет инерционность. Она пропорциональна квадрату диаметра ротора  . Поэтому диаметр ротора стараются уменьшить, а чтобы сохранить мощность, увеличивают его длину, так для исполнительных двигателей
. Поэтому диаметр ротора стараются уменьшить, а чтобы сохранить мощность, увеличивают его длину, так для исполнительных двигателей  , а для двигателей сквозной конструкции
, а для двигателей сквозной конструкции  .
.
Для повышения энергетических показателей двигателя (  и
и  ) уменьшают воздушный зазор (до 0,3-0,5 мм), но при этом увеличиваются силы притяжения между статором и ротором. При малейшей неравномерности зазора увеличивается напряжение троганья. Для того, чтобы исключить перекосы или биения в таких двигателях, их выполняют по сквозной технологии (сквозной конструкции). В этом случае статор двигателя и корпуса подшипников протачиваются за один проход.
) уменьшают воздушный зазор (до 0,3-0,5 мм), но при этом увеличиваются силы притяжения между статором и ротором. При малейшей неравномерности зазора увеличивается напряжение троганья. Для того, чтобы исключить перекосы или биения в таких двигателях, их выполняют по сквозной технологии (сквозной конструкции). В этом случае статор двигателя и корпуса подшипников протачиваются за один проход.
Для повышения быстродействия используют двигатели с полым немагнитным ротором [12].
Защита, блокировки и сигнализация, применяемые в электромеханических системах.Наличие устройств защиты существенно повышает живучесть ЭП, а блокировка и сигнализация дают возможность легко вписать приводимую в движение машину в технологическую линию.
Защита электродвигателей.При нарушениях нормальной работы ЭМС для исключения выхода из строя электрооборудования широко используются различные виды защиты, которая позволяет повысить надежность работы ЭД. Широкое распространение получили следующие виды защиты: нулевая, max и min токовые защиты, тепловая [10; 4].
В необходимых случаях используют специальные виды защиты, предупреждающие о превышении скорости механизма выше допустимого или перемещении исполнительного органа за допустимые пределы.
Нулевая защита обеспечивает защиту от самозапуска двигателя при чрезмерном снижении напряжения или исчезновении его на короткое время. В случае питания цепи управления и силовой цепи от одной сети осуществляется самим контактором или автоматическим выключателем. В случае раздельного питания силовых и управляющих цепей контроль напряжения двигателя осуществляет реле защиты по напряжению (FV), которое включается в силовую цепь.
Максимально-токовая защита обеспечивает защиту двигателя, цепей управления преобразователя от токов короткого замыкания. Обычно осуществляется плавкими вставками, максимально-токовыми реле или автоматическими выключателями с электромагнитными расцепителями.
Тепловая защита обеспечивает защиту двигателя от перегрузки. Осуществляется тепловыми реле или автоматическими выключателями с тепловыми расцепителями (FP).
Минимально-токовая защита используется в ДПТ и в синхронных двигателях для защиты цепи обмотки возбуждения. Осуществляется защита min токовыми реле, называемыми часто реле нулевого тока (KF) (реле обрыва поля). Защита работает на отключение двигателя.
Блокировки, используемые в схемах электропривода
Блокировки обеспечивают определенный порядок работы оборудования. Бывают блокировки технологические и защитные. Защитные блокировки обеспечивают безопасность работы схемы, исключая ложные и аварийные срабатывания. По исполнению блокировки бывают внутренние и внешние. Внутренние - это блокировки между аппаратами одной схемы, а внешние – это блокировки между аппаратами разных схем.
К защитным блокировкам относятся путевые блокировки, ограничивающие движение механизмов за установленные пределы.
Сигнализация в схемах электропривода. Сигнализации, использующиеся в системе электропривода, делятся на контрольную, технологическую и аварийную.
Контрольная служит для контроля наличия того или иного сигнала или напряжения. Она дает информацию об истинном положении включаемых и отключаемых аппаратов.
Технологическая дает информацию о последовательности операций, выполняемых электроприводом.
Аварийная указывает аварийное состояние схемы или действие той или иной защиты в схеме.
Сигнализация бывает: световая (лампы, световые табло), звуковая (звонки, сирены) и визуальная (указательные реле).
Библиографический список. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. - М.: Энергоиздат, 1981.
1. Сабинин Ю.А. Электромашинные устройства автоматики. – Л.: Энергоиздат, 1988.
2. Волков Н.И., Миловзоров В.П. Электромашинные устройства автоматики. – М.: Высшая школа, 1986.
3. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева, А.В. Шинянского – М.: Энергоиздат, 1983.
4. Ильинский Н.Ф., Козаченко В.Ф. Общий курс электропривода. – М.: Энергоиздат, 1992.
5. Ключев В.И. Теория электропривода, - М.: Энергоатомиздат, 1985.
6. Башарин А.В. и др. Управление электроприводами. – Л.: Энергоиздат, 1982.
7. Ланген А.М., Красник В.В. Электрооборудование предприятий текстильной промышленности. – М.: Легпромиздат, 1991.
8. Москаленко В.В. Электрический привод. – М.: Мастерство, 2000.
9. Васин В.М. Электрический привод. – М.: Высшая школа, 1984.
10. Арменский Е.В. и др. Автоматизированный электропривод. – М.: Высшая школа, 1987.
11. Кацман М.М. Электрические машины и электропривод автоматических устройств. – М.: Высшая школа, 1987.
12. Михеев Ю.А., Морозов Э.В. Электрический привод. – М.: Агропромиздат, 1988.
13. Цейтлин Л.С. Электропривод, электрооборудование и основы управления. – М.: Высшая школа, 1985.
Дата добавления: 2022-05-27; просмотров: 136;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
