Принципы управления пуском и торможением в резисторных электроприводах
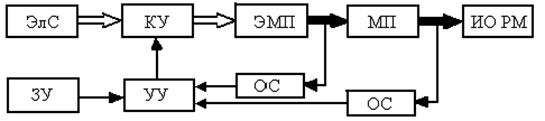
Рис. 3.1. Функциональная схема электропривода:
ЭлС – электрическая сеть;
КУ – коммутационное устройство;
ЭМП – электромеханический преобразователь (двигатель);
МП – механический преобразователь (редуктор);
ИО РМ – исполнительный орган рабочей машины;
ЗУ – задающее устройство;
УУ – устройство управления;
ОС – обратная связь
В таких приводах напряжение сети, как правило, остается неизменным и с помощью коммутирующего устройства по сигналу УУ ЭД подключается к электрической сети.
В приводах обычно используется контактная и бесконтактная аппаратура релейного действия. Большое место среди этих приводов занимают ЭП без регулирования скорости. Учитывая большие пусковые токи и моменты ЭД в таких ЭП, приходится управлять процессами пуска и торможения, накладывая ограничения на пусковой ток и пусковой момент. В таких системах, как правило, используют параметрические способы управления координатами ЭП. В зависимости от способа управления различают управление двигателем в функции времени (с контролем времени), в функции скорости (с контролем скорости), в функции тока (с контролем тока), в функции пути (с контролем пути). Последний способ нашел широкое применение в робототехнических устройствах и широко встречается на практике под названием «позиционирование».
Управление двигателем в функции времени.Осуществляется с помощью реле времени, которое отсчитывает соответствующее время пуска или торможения двигателя, включая в нужный момент ступени пускового или тормозного резистора [1; 10; 14]. Этот способ управления получил широкое распространение при пуске и торможении ДПТ. Его достоинство в том, что время пуска (торможения) практически не зависит от внешних факторов. Время пуска (торможения) при линейной зависимости 
 , что обычно имеет место, можно определить из уравнения движения при
, что обычно имеет место, можно определить из уравнения движения при  , смотри уравнение (2.23);
, смотри уравнение (2.23);
 , (3.1)
, (3.1)
 , (3.2)
, (3.2)
где J – суммарный момент инерции ЭП;
Мнач,Мкон – начальные и конечные значения моментов ЭД, которым соответствуют значения скорости  ;
;
Мс – момент статической нагрузки на валу двигателя.
Рассмотрев линейные характеристики двигателя, при этом полагаем, что Мс реактивный момент и Мс =const. При выборе установок реле времени учитывают собственное время срабатывания контакторов.
 , (3.3)
, (3.3)
 , (3.4)
, (3.4)
где tсрКМ – время включения контактора ускорения (время срабатывания);
tomпKM – время отпускания контактора торможения.
Этот метод управления хорош лишь при Мс =const.
Управление двигателем в функции скорости.Осуществляется с помощью датчиков скорости, которые по мере достижения приводом заданной скорости включают или отключают ступени пусковых (тормозных) резисторов. В качестве датчиков скорости обычно используют реле напряжения, контролирующее скорость ДПТ, по их ЭДС (  ), а скорость АД по частоте или ЭДС тока ротора
), а скорость АД по частоте или ЭДС тока ротора  . Этот способ обычно используют при управлении тормозными режимами двигателя постоянного и переменного тока.
. Этот способ обычно используют при управлении тормозными режимами двигателя постоянного и переменного тока.
Управление двигателем в функции тока.В этом случае управление осуществляется с помощью реле min тока, которые обычно включаются в цепь якоря двигателя и срабатывают при достижении током min заданного значения [1; 10; 14].
Достоинства: измеряем непосредственно ток (  ).
).
Недостатки: сложность настройки токовых реле, существенное влияние на процесс управления колебаний нагрузки и напряжения источника питания. Этот способ управления редко применяется.
Управление двигателем в функции пути. (принципы позиционирования электропривода).В этом случае управляющие команды на включение и отключение двигателя подаются при достижении ИО РМ определенного положения.
Автоматическое управление положением осуществляется в двух видах:
1) дискретное позиционирование электропривода в заданных точках пути по дискретным сигналам путевых датчиков;
2) непрерывное автоматическое управление положением по отклонению для осуществления дозированных перемещений по заданной программе.
Если при первом способе достигается точность позиционирования около 0,1..0,01мм, то во втором случае точность позиционирования увеличивается на порядок. В первом случае контроль пути осуществляется с помощью дискретных контактных и бесконтактных датчиков. В некоторых случаях используют специальные кодовые датчики, которые выдают два и более сигналов, обеспечивая несколько команд: первая грубая и вторая окончательная - точная. Во втором случае используются датчики, непрерывно контролирующие перемещение регулирующего органа. Такие датчики могут быть аналоговыми или цифровыми. Для постоянного контроля положения в измерительных устройствах часто используют специальные кинематические цепи.
При любом способе управления в процессе работы ЭП обеспечивает:
1) задание позиции или значения перемещения;
2) контроль перемещения в позиции;
3) точный останов в заданной позиции.
При точном останове обычно на ЭП накладывается механический тормоз, помогающий остановить регулирующий орган в заданной позиции. Для повышения точности на последней стадии обычно осуществляется переход на пониженные скорости (скорости дотягивания), таких скоростей может быть несколько.
Управление скоростью электропривода.Большинство машин в процессе работы требует управления скоростью исполнительного органа. Раньше эта процедура осуществлялась за счет коробки передач или вариатора. Сегодня эта задача решается за счет изменения скорости двигателя. Рассмотрим в разделах 4 и 5 основные способы управления скоростью и моментом двигателей постоянного и переменного тока.
Для оценки способа управления скоростью привода используют ряд показателей.
Основные показатели, характеризующие способы регулирования скорости вращения ЭП:
1. Диапазон регулирования:  , где ω0max, ω0min- скорость холостого хода двигателя на верхней и нижней границе диапазона регулирования.
, где ω0max, ω0min- скорость холостого хода двигателя на верхней и нижней границе диапазона регулирования.
2. Плавность регулирования  представляет собой отношение скоростей при переходе с одной ступени регулирования на другую.
представляет собой отношение скоростей при переходе с одной ступени регулирования на другую.
3. Экономичность регулирования характеризуется затратами на устройство управления и потерями в процессе работы.
4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном изменении нагрузки. Определяется жесткостью механических характеристик. Чем выше жесткость, тем выше стабильность.
5. Направление регулирования скорости (вверх или вниз от номинальной).
6. Допустимая нагрузка двигателя – это наибольшее значение момента, с которым двигатель может работать длительное время на регулировочных характеристиках (не перегреваясь).
Электропривод с двигателями постоянного тока независимого возбуждения
Двигатели постоянного тока независимого возбуждения (ДПТ НВ) нашли широкое применение в системах регулируемого ЭП различных машин в связи с возможностью плавного регулирования скорости в широком диапазоне и при линейных механических характеристиках.
Схемы включения и статические характеристики двигателя.Основная схема включения ДПТ НВ приведена на рис. 4.1.
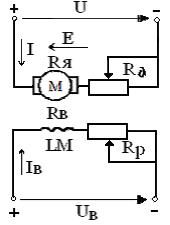
Рис. 4.1. Схема включения ДПТ НВ
В этой схеме: U – напряжение питания якоря;
Uв – напряжение питания обмотки возбуждения;
I – ток якоря;
Iв – ток возбуждения;
Rя= Rобмя + Rдп+ Rко + Rщк, сопротивление якорной цепи двигателя;
Rобмя – сопротивление обмотки якоря;
Rдп– сопротивление добавочных полюсов;
Rко– сопротивление компенсационной обмотки;
Rщк– сопротивление щеточного контакта;
Rд – добавочное сопротивление;
Rв – сопротивление обмотки возбуждения;
Rр – регулировочный резистор в цепи возбуждения;
E – ЭДС якоря.
Для упрощения будем считать, что момент на валу двигателя равен электромагнитному моменту (пренебрегаем механическими потерями) и пренебрегаем реакцией якоря.
ЭД описываются тремя основными уравнениями, определяющими работу двигателя:
 , (4.1)
, (4.1)
 , (4.2)
, (4.2)
 , (4.3)
, (4.3)
где  ,
,
 - магнитный поток в Веберах;
- магнитный поток в Веберах;
 - подводимое напряжение к якорю, В;
- подводимое напряжение к якорю, В;
 - конструктивный коэффициент двигателя,
- конструктивный коэффициент двигателя,
где p – число пар полюсов;
N – число активных проводников обмотки якоря;
a – число параллельных ветвей обмотки якоря.

На практике используется электромеханическая характеристика двигателя, показывающая зависимость частоты вращения от тока якоря. Из уравнений (4.1) и (4.2) получим
 . (4.4)
. (4.4)
Используя уравнение (4.3), получим механическую характеристику двигателя:
 . (4.5)
. (4.5)
При постоянном магнитном потоке Ф =const механические и электромеханические характеристики отличаются лишь масштабом по оси абсцисс (рис. 4.2) и представляют собой семейство параллельных прямых.
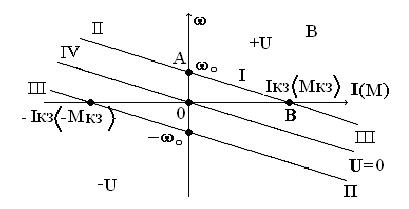
Рис. 4.2. Механические характеристики ДПТ НВ:
А – точка холостого хода  , I=0, M=0;
, I=0, M=0;
B – точка короткого замыкания  , I=Iкз, M=Мкз
, I=Iкз, M=Мкз
Энергетические режимы работы двигателя. Электрическая машина обладает свойством обратимости, то есть может работать как генератором, так и двигателем, переход из одного режима в другой происходит без изменения схемы включения [9; 14].
Энергетический режим работы машины может быть определен, исходя из направления двух переменных: электрических ЭДС (Е) и тока (I) или механических момента (М) и скорости (ω). При одинаковом направлении скорости и момента и разных направлениях ЭДС и тока имеет место двигательный режим. При противоположном направлении скорости и момента и одинаковом направлении ЭДС и тока имеем генераторный режим.
Граничными между генераторным и двигательным режимами являются режимы холостого хода и короткого замыкания, которых одна из электрических или механических переменных равна нулю. При холостом ходе М=0 и I=0, а при коротком замыкании ω=0 и Е=0.
Рассмотрим основные режимы работы электрической машины (рис. 4.2)
1. Двигательный режим М>0,  , момент и направление вращения совпадают
, момент и направление вращения совпадают  (характеристика I);
(характеристика I);
2. Режим холостого хода М=0,  , двигатель не получает энергию из сети, за исключением энергии на возбуждение I=0 (с вала двигателя энергия тоже не снимается), (т. А - на характеристике);
, двигатель не получает энергию из сети, за исключением энергии на возбуждение I=0 (с вала двигателя энергия тоже не снимается), (т. А - на характеристике);
3. Генераторный режим при работе машины параллельно с сетью (торможение с рекуперацией энергии в сеть) М<0,  ,
,  (ток совпадает с ЭДС по направлению), ток и момент меняют свои направления, момент становится тормозным. Двигатель получает энергию от рабочей машины и отдает её в сеть. (характеристика II);
(ток совпадает с ЭДС по направлению), ток и момент меняют свои направления, момент становится тормозным. Двигатель получает энергию от рабочей машины и отдает её в сеть. (характеристика II);
4. Режим короткого замыкания  , I=Iкз, М=Мкз, Е=0, Iкз =
, I=Iкз, М=Мкз, Е=0, Iкз =  , электрическая энергия поступает из сети и рассеивается в виде тепла в якорной цепи, механическая энергия с вала не отдаётся. (т. В - на характеристике);
, электрическая энергия поступает из сети и рассеивается в виде тепла в якорной цепи, механическая энергия с вала не отдаётся. (т. В - на характеристике);
5. Режим работы генератора последовательно с сетью (торможение противовключением) М>Мкз, за счет изменения направления скорости ЭДС также меняет свою полярность, ток в якоре совпадает по направлению с приложенным напряжением и ЭДС  . Электрическая энергия, поступающая из сети и вырабатываемая самой машиной, рассеивается в виде тепла в якорной цепи. (характеристика III)
. Электрическая энергия, поступающая из сети и вырабатываемая самой машиной, рассеивается в виде тепла в якорной цепи. (характеристика III)
6. режим автономного генератора (рис. 4.3) (динамическое торможение), якорь двигателя отключается от сети и замыкается на тормозной резистор. Механическая энергия, накопленная в системе, выделяется в виде тепла в якорной цепи. Этот режим используется на практике как тормозной. (характеристика IV).
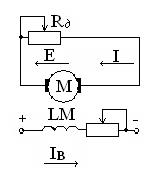
Рис. 4.3. Схема включения ДПТ НВ в режиме автономного генератора
Из уравнения механической характеристики очевидны основные способы регулирования частоты вращения ДПТ НВ:
 - механическая характеристика
- механическая характеристика
 - электромеханическая характеристика
- электромеханическая характеристика
1) изменением сопротивления якорной цепи R,
2) изменением магнитного потока Ф,
3) изменением приложенного напряжения U.
Регулирование частоты вращения двигателей изменением сопротивления в цепи якоря
Этот способ регулирования отличается универсальностью и простотой реализации. Применяется, когда не требуется высокого качества регулирования [9; 14]. Диапазон регулирования небольшой:  . В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки
. В зависимости от характера изменения добавочного сопротивления, включенного в цепь якоря (рис. 4.1), регулирование может быть плавное, может быть ступенчатое (ступенчатое чаще). Регулирование осуществляется вниз от номинальной скорости. С увеличением добавочного резистора жесткость характеристик снижается (рис. 4.4). При этом все характеристики выходят из одной точки  .
.
Оценим допустимую нагрузку
 (4.6)
(4.6)
 - относительный перепад скорости (статизм).
- относительный перепад скорости (статизм).
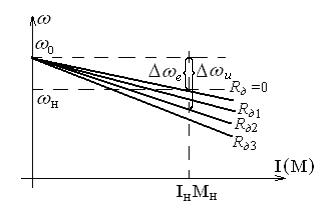
Рис. 4.4. Семейство механических характеристик ДПТ НВ:
Rд =0 – естественная и Rдn – искусственные характеристики
Значение  , приблизительно соответствует D=2, в этом случае потери двигателя:
, приблизительно соответствует D=2, в этом случае потери двигателя:  - следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной
- следовательно, КПД приблизительно равен 50%, то есть регулирование не экономичное, большие потери в якорной цепи. Этот способ используется в приводах небольшой мощности. Учитывая, что магнитный поток двигателя постоянный, момент, развиваемый двигателем на регулировочных характеристиках, равен номинальному. Следовательно, допустимая нагрузка на двигателе при работе на искусственных характеристиках равна номинальной  .
.
Способ регулирования частоты вращения ЭП, который характеризуется равенством,  получил название регулирование при «постоянном моменте».
получил название регулирование при «постоянном моменте».
На практике чаще всего резистор Rд секционирован, и при помощи контактора в процессе изменения скорости шунтируются ступени этого добавочного резистора в цепи якоря.
В приводах небольшой мощности используется импульсное регулирование скорости. Суть этого способа (рис. 4.5): шунтирование Rд ключом К, замыкаемого с определенной частотой.
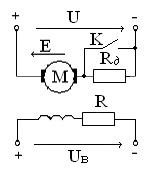
Рис. 4.5. Схема включения ДПТ НВ.
Соотношение длительностей замкнутого t1 и разомкнутого t2 состояния ключа (рис. 4.6) характеризуют относительной величиной ε – называемой скважностью управляющих импульсов.
 ,
,
где  - время замкнутого состояния ключа,
- время замкнутого состояния ключа,
 - время разомкнутого состояния ключа
- время разомкнутого состояния ключа
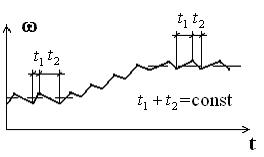
Рис. 4.6. Изменение скорости привода при изменении 
Очевидно, что с увеличением при неизменной нагрузке на валу угловая скорость двигателя будет расти.
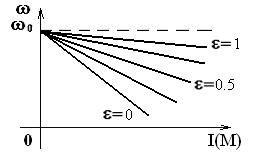
Рис. 4.7. Механические характеристики привода при
импульсном регулировании скорости
При =1 двигатель работает на естественной характеристике (рис. 4.7) (ключ К - замкнут). При =0 двигатель работает на реостатной характеристике соответствующей Rд (ключ К - разомкнут).
 , (4.7)
, (4.7)
 . (4.8)
. (4.8)
Учитывая, что скорость двигателя зависит от нагрузки и величины  в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
в цепи якоря, мы можем изменять среднюю скорость двигателя, поддерживая её постоянной при колебаниях нагрузки или изменяя по определенному закону. В результате мы получаем возможность управления приводом, аналогичную рассмотренной ранее при тех же механических характеристиках. Только на искусственных характеристиках указывают скважность, которая соответствует Rдэ (рис. 4.7). Как видим из выражения (4.8), характеристики линейны. Такой способ применяется в приводах небольшой мощности.
Расчёт регулировочных резисторов в цепи якоря двигателя. Расчёт ведут на основе известной механической характеристики двигателя и его паспортных данных. При этом используется метод пропорций или метод отрезков. Обратимся к нарисованному нами семейству механических характеристик двигателя при изменении сопротивлений в цепи якоря (рис. 4.4). При условии, что характеристики линейны, попытаемся определить величину  , необходимого для получения искусственной характеристики [9].
, необходимого для получения искусственной характеристики [9].
Очевидно, что:
 ,
,
 , (4.9)
, (4.9)
где  - сопротивление якоря, соответствующее естественной характеристике.
- сопротивление якоря, соответствующее естественной характеристике.
Необходимо в данном случае знать сопротивление якоря. Его можно найти в каталоге, либо непосредственным измерением. Если же ни то ни другое невозможно, для определения сопротивления  используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
 , (4.10)
, (4.10)
где  - условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
- условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
Регулирование тока и момента при торможении и реверсе двигателя
В большинстве случаев регулирование тока и момента двигателя сводится к их ограничению. Для этого в цепь якоря вводится регулируемый резистор (рис. 4.1).
Учитывая особенности пуска ДПТ НВ (большой пусковой ток и момент), в цепь якоря вводят регулировочный резистор на момент пуска (пусковой резистор) для ограничения пускового тока и момента. В результате пуск двигателя осуществляется по характеристике (1) (рис. 4.8), которая проходит через точку ω0 и 
 . Значения и
. Значения и  заданы условиями пуска и определяют своей величиной пусковой резистор [9].
заданы условиями пуска и определяют своей величиной пусковой резистор [9].
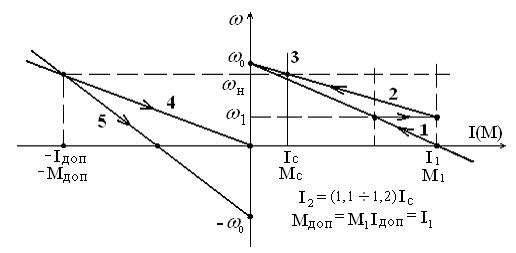
Рис. 4.8. Механические характеристики ДПТ НВ
После того, как двигатель разогнался до некоторой скорости ω1, пусковой резистор шунтируют и двигатель переходит на работу по естественной характеристике (2) Rд=0. При шунтировании пускового резистора происходит скачок тока и момента, который не должен превышать и . При расчете пусковых резисторов колебание тока (момента) ограничивают значением I1 I2. При этом I1 выбирают равным Iдоп≈(2  2,5)Iн, а I2 обычно берут (1,1 1,2)Iс, где Iс - ток, определяемый нагрузкой. Характеристика (3) – это
2,5)Iн, а I2 обычно берут (1,1 1,2)Iс, где Iс - ток, определяемый нагрузкой. Характеристика (3) – это  - характеристика рабочей машины. В большинстве случаев для более плавного пуска пусковой реостат имеет несколько ступеней, которые последовательно закорачиваются, за счет этого можно ограничить колебания тока и момента.
- характеристика рабочей машины. В большинстве случаев для более плавного пуска пусковой реостат имеет несколько ступеней, которые последовательно закорачиваются, за счет этого можно ограничить колебания тока и момента.
Сопротивления резисторов, позволяющие получить необходимые характеристики, рассчитывают по формуле (4.1), так для случая пуска при  ,
,  будем иметь
будем иметь
 .
.
Важную роль в работе привода играют процессы торможения, которые определяются требованиями технологического процесса рабочей машины. Обычно используют два способа торможения: динамическое и противовключением.
При динамическом торможении (характеристика 4 рис. 4.8) якорь отключается от сети и замыкается на тормозное сопротивление. Двигатель работает в режиме автономного генератора (рис 4.3) и тормозится до нулевой скорости. Недостатком является то, что тормозной момент двигателя также уменьшается до нуля. Для ограничения тормозного тока в цепь якоря включают тормозной резистор:
 .
.
При торможении двигателя противовключением меняют полярность напряжения на якоре или на обмотке возбуждения. Двигатель переходит на работу по характеристике 5 (рис. 4.8) и работает генератором, включенным последовательно с сетью. Учитывая то, что в этом случае ЭДС меняет знак, имеем очень большие тормозные токи, и в цепь якоря приходится вводить большое сопротивление для ограничения тока:
 .
.
Регулирование скорости двигателя изменением магнитного потока. Скорость двигателя зависит от магнитного потока, причем с увеличением магнитного потока она уменьшается (см. уравнение (4.4)). Следовательно, изменяя ток в цепи возбуждения, изменяем магнитный поток и скорость двигателя [1; 9].
Поскольку электрическая машина рассчитывается на продолжительную работу с номинальной нагрузкой, стремятся оптимально использовать железо машины. Для этой цели рабочая точка обычно выбирается на колене кривой намагничивания (рис. 4.10). Такой выбор рабочей точки ограничивает возможности регулирования скорости двигателя за счет увеличения тока возбуждения. На практике используют только регулирование за счет уменьшения магнитного потока вниз от номинального. В результате скорость регулируется вверх от номинальной. Диапазон регулирования равен 2 (редко 3). Регулирование плавное, с увеличением скорости жесткость характеристик снижается.
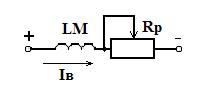
Рис. 4.9. Схема управления током возбуждения ДПТ НВ
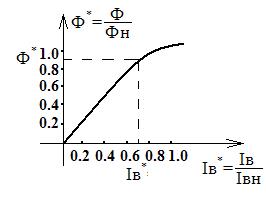
Рис. 4.10. Кривая намагничивания
Достоинством этого способа является то, что управление двигателем осуществляется за счет изменения сопротивления в слаботочной цепи (рис. 4.9) и, следовательно, потери при регулировании в этом случае минимальны.
Электромеханические характеристики (рис. 4.11) двигателя имеют общую точку, соответствующую Iкз  , так как Iкз от магнитного потока Ф не зависит.
, так как Iкз от магнитного потока Ф не зависит.
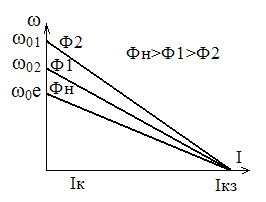
Рис. 4.11. Электромеханическая характеристика ДПТ НВ
Механические характеристики показаны на рис. 4.12. Очевидно, что Мкз=kФIкз – зависит от Ф и снижается с его уменьшением.
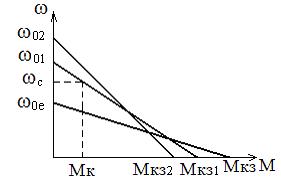
Рис. 4.12. Механическая характеристика ДПТ НВ
Определяем допустимую нагрузку на искусственных характеристиках. Полагая в уравнении 4.3 I=Iн, получим
 ,
,
где  - поток на искусственной характеристике.
- поток на искусственной характеристике.
В нашем случае Фи<Фн  Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
 ,
,
 .
.
Учитывая, что напряжение, ток и сопротивление якоря постоянны Ее=Еи, следовательно:
 ,
,
где  - скорость на искусственной характеристике при номинальном токе.
- скорость на искусственной характеристике при номинальном токе.
В результате:
 .
.
При этом способе регулирования мы максимально используем двигатель (не перегружая его) при постоянной мощности нагрузки.
Такой способ регулирования в практике ЭП получил название «регулирование с постоянной мощностью». Этот способ регулирования используется в замкнутых системах привода для расширения диапазона регулирования за счет второй зоны. В первой зоне регулирование обычно осуществляется за счет изменения напряжения на якоре (основная зона), а во второй за счет изменения магнитного потока. Использование двухзонного регулирования позволяет в два-три раза увеличить диапазон регулирования.
В простейшем случае регулирование осуществляется за счет изменения регулировочного сопротивления в цепи обмотки возбуждения (рис. 4.9). Величину этого регулировочного сопротивления Rp1 можно найти определив магнитный поток Ф1.
Магнитный поток  , при котором механическая характеристика проходит через точку с координатой (
, при котором механическая характеристика проходит через точку с координатой (  ) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
 , (4.11)
, (4.11)
где  ;
;  ;
;  .
.
Величину Iв1* находят по кривой намагничивания (рис. 4.10), предварительно определив соответствующее значение Ф1*.
После этого находят ток возбуждения  и определяют
и определяют  (рис. 4.9).
(рис. 4.9).
 . (4.12)
. (4.12)
Регулирование скорости вращения двигателя изменением напряжения, подводимого к якорной цепи
Этот способ регулирования скорости вращения является основным, поскольку он позволяет получить высокое качество регулирования при широком диапазоне регулирования и высокой жесткости характеристик [1; 14]. Потери мощности на регулировочных характеристиках практически соответствуют потерям мощности в номинальном режиме. На базе этого способа создаётся большинство замкнутых систем регулирования.
Для получения регулируемого напряжения в якорной цепи используется преобразователь, в качестве которого обычно выступает управляемый выпрямитель (это связано с тем, что основным источником питания является трёхфазная сеть), а регулирование частоты вращения осуществляется вниз от номинальной, поскольку повышать напряжение выше номинального мы не можем. Допустимый момент на регулировочных характеристиках  соответствует номинальному при условии, что
соответствует номинальному при условии, что  (при этом мы полагаем, что по мере снижения частоты вращения условия вентиляции практически не меняются). Запишем уравнение электромеханической характеристики:
(при этом мы полагаем, что по мере снижения частоты вращения условия вентиляции практически не меняются). Запишем уравнение электромеханической характеристики:
 . (4.13)
. (4.13)
При изменении напряжения:
 , таким образом
, таким образом
 ,
,
т.е. изменение скорости обусловлено изменением напряжения.
Регулировочные характеристики представляют прямые линии, параллельные друг другу, следовательно, они имеют одинаковую жесткость, за счет чего обеспечивается высокая стабильность угловой скорости во всем диапазоне регулирования, который определяется выражением:
 . (4.14)
. (4.14)
В разомкнутой системе диапазон регулирования достигает 10, а в замкнутой 1000 и более.
 - относительный перепад угловых скоростей (статизм). Так как
- относительный перепад угловых скоростей (статизм). Так как  и
и  , то статизм увеличивается при снижении скорости. Изменение скорости на характеристике, которое зависит от жесткости характеристики, ограничивает диапазон регулирования скорости.
, то статизм увеличивается при снижении скорости. Изменение скорости на характеристике, которое зависит от жесткости характеристики, ограничивает диапазон регулирования скорости.
КПД двигателя в данном случае (без учёта потерь на возбуждение) равен отношению фактической угловой скорости к угловой скорости идеального холостого хода на заданной характеристике.
Потери мощности в якорной цепи при постоянном моменте нагрузки остаются неизменными при регулировании скорости и равны потерям на естественной характеристике. Но поскольку угловая скорость машины в процессе регулирования уменьшается, полезная мощность уменьшается, КПД уменьшается.
Рассмотрим два варианта управления скоростью двигателя изменением напряжения, подводимого к якорной цепи.
Система генератор-двигатель (Г-Д).Первоначально для питания двигателей использовался электромашинный управляемый преобразователь (система «генератор-двигатель») (рис. 4.13) [1; 2; 14].
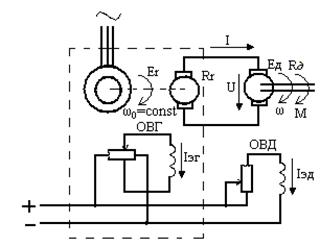
Рис. 4.13. Схема системы «генератор-двигатель».
В пунктир заключён электромашинный преобразователь, включающий в себя гонный асинхронный двигатель и генератор постоянного тока. Такой преобразователь позволяет в широком диапазоне изменять напряжение  на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть
на двигателе, изменяя ток возбуждения генератора (ОВГ). Очевидно, что в данном случае напряжение на выходе преобразователя определяется ЭДС генератора. Данная система позволяет обеспечить все возможные режимы работы двигателя. Механические характеристики двигателя (рис. 4.14) располагаются во всех 4 квадрантах. Основной режим работы двигателя в такой системе – это работа с постоянным магнитным потоком, то есть  . Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что
. Мы можем записать уравнения электромеханической и механической характеристик двигателя, полагая, что  :
:
 ; (4.15)
; (4.15)
 , (4.16)
, (4.16)
где  - магнитный поток двигателя;
- магнитный поток двигателя;
Rя – сопротивление якоря двигателя;
Rг – сопротивление якоря генератора.
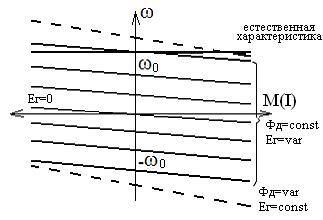
Рис. 4.14. Механические характеристики двигателя в системе Г-Д
Как видим, механические характеристики представляют параллельные прямые, наклон которых несколько больше, чем у естественной характеристики двигателя (жесткость меньше) при Ф=const. Мы наблюдаем их во всех четырёх квадрантах, т.е. двигатель может работать во всех возможных режимах. Реверс двигателя осуществляется за счет изменения полярности тока в обмотке возбуждения генератора (ОВГ).
Данная система позволяет осуществить двухзонное регулирование:
1 зона – за счет изменения напряжения (ЭДС генератора);
2 зона – за счёт изменения магнитного потока двигателя при
номинальном напряжении (характеристики показаны пунктиром
рис 4.14).
Достоинством данной системы являются плавность регулирования, широкий диапазон регулирования, возможность получения линейных непрерывных характеристик во всём диапазоне регулирования и получение всех возможных режимов работы двигателя.
К недостаткам данной системы можно отнести: утроенную установленную мощность машин, низкий КПД, большую инерционность.
Система «тиристорный преобразователь – двигатель (ТП-Д)» Основным типом преобразователей, применяемых в настоящее время для управления ДПТ, является тиристорный преобразователь, то есть статический полупроводниковый преобразователь. Эти преобразователи представляют управляемые реверсивные или нереверсивные, однофазные или трёхфазные выпрямители, собранные по мостовой или нулевой схеме [2; 5; 14]. Определённые перспективы развития тиристорных преобразователей связаны с использованием в них транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения.
Рассмотрим характеристики привода на примере использования в нем простейшего нереверсивного статического преобразователя.
|
|
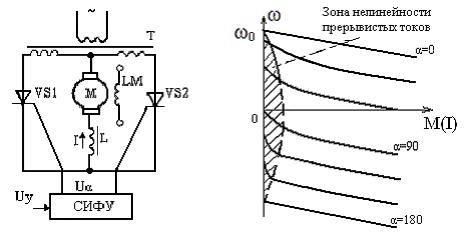
Преобразователь включает в себя в общем случае согласующий трансформатор Т, два тиристора VS1 и VS2, сглаживающий дроссель L и систему импульсно-фазового управления (СИФУ). Преобразователь обеспечивает регулирование напряжения на Д за счёт изменения среднего значения ЭДС преобразователя. Это достигается регулированием с помощью СИФУ угла управления  тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
тиристорами (угол представляет собой угол задержки открытия тиристоров относительно момента, когда напряжение на анодах становится положительным). Зависимость среднего значения ЭДС от угла для многофазного преобразователя:
 , (4.17)
, (4.17)
где  - число фаз преобразователя;
- число фаз преобразователя;
 - амплитудное значение ЭДС преобразователя;
- амплитудное значение ЭДС преобразователя;
 - ЭДС преобразователя при
- ЭДС преобразователя при  .
.
В связи с пульсирующим характером ЭДС на выходе преобразователя ток в цепи Д также пульсирует. Такой характер тока оказывает вредное влияние на работу Д: ухудшаются условия коммутации, возникают дополнительные потери на нагрев. Для уменьшения пульсаций тока в цепь якоря Д включают сглаживающий дроссель. Габариты преобразователя и его вес определяются размерами дросселя и трансформатора. Уравнения электромеханической и механической характеристик имеют вид:
 , (4.18)
, (4.18)
 . (4.19)
. (4.19)
Здесь:
 - эквивалентное сопротивление преобразователя;
- эквивалентное сопротивление преобразователя;
- число фаз преобразователя;
 и
и  - приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и акт
- приведённые ко вторичной обмотке трансформатора индуктивное сопротивление рассеянья и акт
Дата добавления: 2022-05-27; просмотров: 140;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
