Применение периодических процессов в физических измерениях
Наряду с поступательными и вращательными движениями тел в механике значительный интерес представляют и колебательные движения. В технике и окружающем нас мире часто приходится сталкиваться с периодическими (или почти периодическими) процессами, которые повторяются через одинаковые промежутки времени. Такие процессы называют колебательными. Примерами простых колебательных систем могут служить груз на пружине или математический маятник. В зависимости от физической природы повторяющегося процесса различают колебания механические, электромагнитные, электромеханические и т.п. При механических колебаниях периодически изменяются положения и координаты тел. При электрических – напряжение и сила тока.
Колебательные явления различной физической природы подчиняются общим закономерностям. Например, колебания тока в электрической цепи и колебания математического маятника могут описываться одинаковыми уравнениями. Общность колебательных закономерностей позволяет рассматривать колебательные процессы различной природы с единой точки зрения.
Механическими колебаниями называют движения тел, повторяющиеся точно (или приблизительно) через одинаковые промежутки времени. Закон движения тела, совершающего колебания, задается с помощью некоторой периодической функции времени x = f(t). Графическое изображение этой функции дает наглядное представление о протекании колебательного процесса во времени.
К колебательным системам относится в частности пружинный маятник. представляющий собой материальную точку массы m, соединенную невесомой пружиной жёсткостью к с неподвижным подвесом (рис. 1.14). Под действием силы тяжести пружина растягивается на величину Х1. В положении равновесия сила тяжести уравновешена силой упругости F=-kx1. Если груз отклонить на величину х, то на появится результирующая сила, пропорциональная отклонению F=-kx.
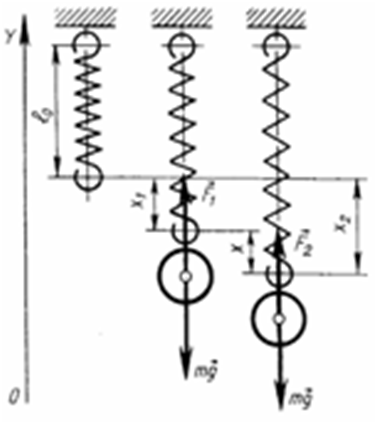
| Рис.1.13. Пружинный маятник |
Если применить закон Ньютона для такого периодического осциллятора, то получим следующее уравнение:ma=-кх; m  .
.
Это линейное дифференциальное уравнение второго порядка с постоянными коэффициентами. Движение характеризуется тем, что ускорение прямо пропорционально перемещению и обратно пропорционально ему по знаку.
Решить уравнение - это найти функцию, которая, будучи дважды продифференцирована, превращалась сама в себя, но с противоположным знаком. Такой функцией является функция х=cosωоt(гармоническая функция). Колебания грузика на пружине представляют собой гармонические колебания!
Гармонические колебания – это периодический процесс, в котором рассматриваемый параметр изменяется по гармоническому закону (по закону косинуса).
Смысл гармонического движения следующий: любая система является наиболее устойчивой в положении равновесия. Выведенная из этого положения (в случае пружинного маятника для этого надо оттянуть грузик вниз или толкнуть его) она стремится вернуться к равновесию под действием приложенных сил. Возвращаясь к состоянию равновесия, объект это состояние проскакивает по инерции и двигается в противоположную сторону, движение в противоположную сторону замедляется и объект останавливается, затем возвращается назад и т.д., т.е. возникают колебания вокруг положения равновесия.
Дифференциальное уравнение имеет рад решений, наиболее общее решение рассматриваемого уравнения будет иметь вид: х = Аcos ωо(t-t1) или х = Аcos (ωоt-φ0).
Величину ωоt часто называют фазойдвижения - величина, показывающая, какая часть колебания прошла с начала процесса. Измеряется в угловых величинах – градусах или радианах. φ0 – ее начальное значение. Параметры движения повторяются через промежуток времени, называемый периодом Т – х(t)=(t+T) (см.рис.5.2). Через период фаза изменяется на величину 2π, ωо(t+Т)=ωоt+2π, отсюда: ωоТ=2π;  .Величину ωо называют угловой частотой; это число радианов, на которое фаза изменяется за 1 сек. Ее значение определяется коэффициентами д.у., которые в случае колебательного маятника (осциллятора) определяются параметрами осциллятора. Для пружинного маятника такими параметрами являются масса грузика
.Величину ωо называют угловой частотой; это число радианов, на которое фаза изменяется за 1 сек. Ее значение определяется коэффициентами д.у., которые в случае колебательного маятника (осциллятора) определяются параметрами осциллятора. Для пружинного маятника такими параметрами являются масса грузика  и коэффициент жесткости пружины к. Период пружинного маятника
и коэффициент жесткости пружины к. Период пружинного маятника  . Постоянная А - максимальное значение, которое принимает колебательная система, «размах» колебания, служит мерой максимального отклонения груза и называется амплитудойколебания. Амплитуда определяется начальными условиями – величиной начального отклонения от положения равновесия.
. Постоянная А - максимальное значение, которое принимает колебательная система, «размах» колебания, служит мерой максимального отклонения груза и называется амплитудойколебания. Амплитуда определяется начальными условиями – величиной начального отклонения от положения равновесия.
Продифференцировав уравнение движения получим, что скорость (первая производная от перемещения по времени) и ускорение (вторая производная от перемещения по времени) также изменяются по гармоническому закону.
Аналогичный вывод можно сделать для математического маятника. Математическим маятником называется тело массой m, подвешенное на длинной нерастяжимой нити пренебрежимо малой массы. В положении равновесия на это тело будут действовать сила тяжести и сила упругости нити. Эти силы будут уравновешивать друг друга. (рис. 1.14).
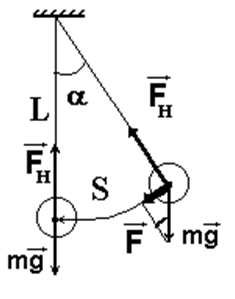

Если нить отклонить на угол α от положения равновесия, то на тело действуют те же силы, но они уже не уравновешивают друг друга, и тело начинает двигаться по дуге под действием составляющей силы тяжести, направленной вдоль касательной к дуге и равной mgsina. При малых отклонениях, если измерять угол в радианах: sinα=tgα=α.
Уравнение движения маятника принимает вид: ma=-mgsinα. Знак минус в правой части означает, что сила направлена против смещения.
Угол в радианах равен отношению длины дуги к радиусу (длине нити), а длина дуги приблизительно равна смещению (x»s):  , в результате получим m
, в результате получим m  - уравнение аналогично уравнению движения пружинного маятника.
- уравнение аналогично уравнению движения пружинного маятника.  . Следовательно, маятник будет совершать механические гармонические колебания с циклической частотой
. Следовательно, маятник будет совершать механические гармонические колебания с циклической частотой  и периодом
и периодом  .
.
Колебания, которые совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия, называются свободными или собственными колебаниями системы. Для того, чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению. Частота свободных колебаний определяется только параметрами самой системы, а амплитуда и фаза – начальными условиями.
Если на систему не действуют другие силы (не переменные), то амплитуда колебаний постоянна. Такие колебания называются незатухающими. При действии сил трения, сопротивления воздуха амплитуда уменьшается. Такие колебания называются затухающими.
Гармоническое движение и движение по окружности. При равномерном движении материальной точки по окружности с угловой скоростью ωо ее проекция на горизонтальную ось совершает движение, которое представляет собой гармоническое колебание. vх = — ωо R sin(ωоt +φ), ах = —ωо2 R cos(ωоt +φ) = —ωо2 x.
Изменение проекции вектора перемещения, проекции вектора скорости и ускорения на координатные оси представляют собой гармоническое движение . Проекция вектора ускорения не зависит от радиуса окружности; оно одинаково при движении по любой окружности при одинаковой ω0.
Свободные колебания – колебания системы, которую вывели из положения равновесия и предоставили самой себе. Возможны колебания, когда на систему воздействует периодическая сила. Периодическая внешняя сила может изменяться во времени по различным законам. Особый интерес представляет случай, когда внешняя сила, изменяющаяся по гармоническому закону с частотой ω, воздействует на колебательную систему, способную совершать собственные колебания на некоторой частоте ω0.F (t) = F0 cos ωt.
Уравнение движения имеет вид: m  . Заменяя k на mω02 приходим к выводу, что функция вида x=Ccosωtрешением этого уравнения при
. Заменяя k на mω02 приходим к выводу, что функция вида x=Ccosωtрешением этого уравнения при  . Колебания, совершающиеся под воздействием внешней периодической силы, называются вынужденными.
. Колебания, совершающиеся под воздействием внешней периодической силы, называются вынужденными.
Внешняя сила совершает положительную работу и обеспечивает приток энергии к колебательной системе. Она не дает колебаниям затухать, несмотря на действие сил трения.
Если свободные колебания происходят на частоте ω0, которая определяется параметрами системы, то установившиеся вынужденные колебания всегда происходят на частоте ω внешней силы.
В начальный момент в колебательной системе возбуждаются оба процесса – вынужденные колебания на частоте ω и свободные колебания на собственной частоте ω0. Но свободные колебания затухают из-за неизбежного наличия сил трения. Поэтому через некоторое время в колебательной системе остаются только стационарные колебания на частоте ω внешней вынуждающей силы. Для установления вынужденных колебаний необходимо некоторое время Δt после начала воздействия внешней силы на колебательную систему. Время установления по порядку величины равно времени затухания свободных колебаний в колебательной системе.
В случае вынужденных колебаний движение описывается уравнением x=Ccosωt, где: С – амплитуда колебаний, определяемая формулой
, из которой следует, что амплитуда вынужденных колебаний зависит от величины вынуждающей силы и разницы квадратов собственной частоты и частоты вынуждающей силы(!). Таким образом, грузик m колеблется с частотой действующей на него силы, но амплитуда колебания зависит от соотношения между частотой силы и частотой свободного движения.
Резонанс. Чем меньше разница  , тем выше амплитуда вынужденных колебаний. Явление резкого возрастания амплитуды вынужденных колебаний при совпадении собственной частоты и частоты внешней силы называется резонансом, а соответствующая частота вынужденных колебаний – резонансной частотой.
, тем выше амплитуда вынужденных колебаний. Явление резкого возрастания амплитуды вынужденных колебаний при совпадении собственной частоты и частоты внешней силы называется резонансом, а соответствующая частота вынужденных колебаний – резонансной частотой.
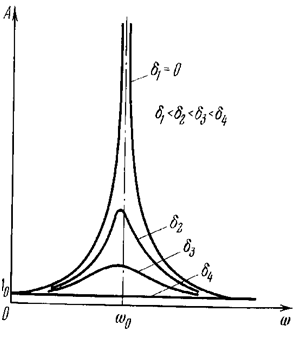
При совпадении частот амплитуда должна быть бесконечно большой. Но в любой механической колебательной системе неизбежны потери энергии на трение, поэтому амплитуда колебаний имеет конечное значение и тем она больше, чем меньше потери в системе. На рис. 1.15 изображен график зависимости амплитуды вынужденных колебаний от частоты внешней силы при разных значениях потерь δ в системе. Амплитуда колебаний существенно возрастает по мере приближения частоты внешней силы к частоте собственных колебаний. Решение уравнения также показывает, что сдвиг фаз между вынуждающей силы и смещением также зависит от разницы между собственной и вынужденной частотой.
| Рис.1.15. .Зависимость амплитуды вынужденных колебаний от частоты внешней силы при разных значениях потерь δ |
С наибольшей амплитудой колеблются объекты при точном совпадении частот. При этом извне затрачивается минимум энергии на поддержание резонанса, а внутрь системы поступает максимум из подводимой энергии. Резонанс может быть и полезным, и вредным. Примером полезного использования резонанса является пневматический хлопкоуборочный комбайн, в котором куст обдувается пульсирующей воздушной струей (частота пульсации равна собственной частоте волокон) и отлетевшая хлопковая масса тут же всасывается трубопроводом.
Ярким примером вредного воздействия резонанса является землетрясение в Мехико 1985 года. Это землетрясение было чрезвычайно разрушительно. Как установили американские эксперты, возникшие во время землетрясения колебания, случайно совпали с собственными колебаниями почвы под многими частями города, а также с собственными колебаниями многих зданий. Чрезвычайная длительность землетрясения способствовала развитию резонансных явлений, которые и привели к разрушению зданий (резонанс усилил вредное воздействие в 6 раз, что превысило предел устойчивости зданий, даже сейсмостойких. Главной причиной разрушения зданий, в большинстве случаев, была частота их собственных колебаний. Отсюда практический вывод: при строительстве новых зданий в сейсмической зоне следует неуклонно следить за тем, чтобы собственные колебания зданий не совпадали с собственными колебаниями грунта, - таким путем удастся значительно смягчить резонансный эффект.
Использование механического резонанса в физических исследованиях. Собственная частота колебаний - универсальная характеристика объекта (системы). Если любое тело заставить колебаться и при этом плавно изменять частоту, то настанет момент резонанса, по резонансной частоте можно определить характеристики тела (массу, размеры, упругость и т.д.).
Если невозможно непосредственно обнаружить или измерить происходящие в системе изменения, то задачу решают возбуждением в системе резонансных колебаний (во всей системы или какой-то ее части), по изменению частоты которых можно определить происходящие в системе изменения. Например, для измерения массы жидкости в резервуаре измеряют резонансную частоту резервуара.
Но не только резонанс является эффективным средством измерения систем. Практически любые изменения собственной частоты колебаний объекта могут служить надежными показателями его механического состояния и физических свойств, например:
По скорости затухания собственных колебаний определяют содержание в яйце плотной и жидкой фракции. По изменению амплитуды колебаний, генерируемых системой инструмент-станок, определяют степень износа инструмента, например сверла.
Принципы измерения времени. Любой физический процесс протекает во времени. В ходе этого процесса изменяется физическая величина (физические величины). Это изменение подчиняется физическим закономерностям. При этом физическая величина может монотонно возрастать, убывать или изменяться периодически.
Если физическая величина является монотонной функцией времени, то зная ее значение в начальный момент времени и вид функции, по ее конечному значению можно определить длительность процесса. Примером такого процесса может служить уровень песка в песочных часах. В случае какого-либо периодического процесса время можно определить по периоду и количеству циклов, прошедших с начала процесса. Чем меньше и стабильнее период колебаний, тем более точно можно определить время.
Таким образом, приняты два принципа измерения времени – накопительный и колебательный (вращательный). На последнем принципе основано измерение времени, как по периоду вращения небесных тел (солнца, Земли, луны и т.п.) , так и измерение времени с помощью атомных часов.
Автоколебания. Вынужденные колебания – это незатухающие колебания. Неизбежные потери энергии на трение компенсируются подводом энергии от внешнего источника периодически действующей силы. Существуют системы, в которых незатухающие колебания возникают не за счет периодического внешнего воздействия, а в результате имеющейся у таких систем способности самой регулировать поступление энергии от постоянного источника. т.е. источника, не обладающего колебательными свойствами. Такие системы называются автоколебательными, а процесс незатухающих колебаний в таких системах – автоколебаниями.
Примеры: часы, орган, духовые инструменты, сердечнососудистая система, паровые машины и двигатели внутреннего сгорания и т.д.
Любая автоколебательная система состоит из 4 частей (рис.1.16):
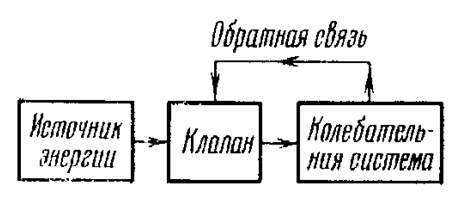
| Рис.1.16. Схема автоколебательной системы. |
1. колебательная система;
2. источник энергии, компенсирующий потери энергии на преодоление сопротивления;
3. клапан – устройство, регулирующее поступление энергии в колебательную систему определенными порциями и в определенный промежуток времени;
4. обратная связь – устройство для обратного воздействия автоколебательной системы на клапан, управляющее работой клапана за счет процессов в самой колебательной системе.
Примером механической автоколебательной системы могут быть часы с анкерным ходом.
Механические волны.Еще одним видом движения являются волны. Отличительной особенностью этого движения, является то, что в волне распространяются не сами частицы вещества, а изменения в их состоянии (возмущения). Если какое-либо тело совершает колебания в упругой среде, то оно воздействует на частицы среды, прилегающие к телу, и заставляет их совершать вынужденные колебания. В среде возникают упругие силы. Эти силы действуют на все более удаленные от тела частицы среды, выводя их из положения равновесия и вовлекая в колебательное движение.
Явление распространения колебаний в пространстве с течением времени называется волной.Волнаминазываются всякие возмущения состояния вещества или поля, распространяющиеся в пространстве с течением времени это может быть изменение высоты подъема частиц воды (морская волна) , изменение давления воздуха (звуковая волна). Упругими волнами называются механические возмущения (деформации), которые распространяются в упругой среде.
Механические волны бывают поперечными и продольными: (рис. 1.17).
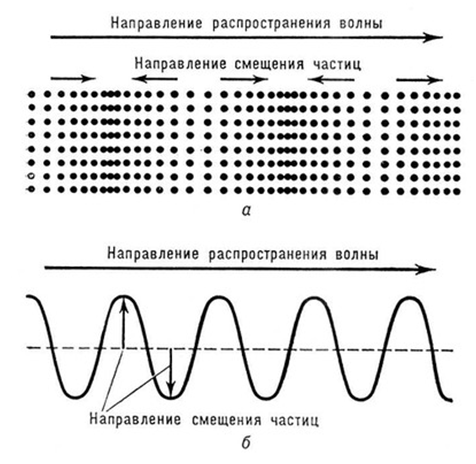
| Рис. 1.17. Изображение продольной (верхний чертеж) и поперечной (нижний чертеж) волны. |
Обе изображенные на рисунке волны распространяются слева направо. Однако частицы среды на верхнем чертеже колеблются вверх-вниз, а на нижнем – влево-вправо. Другими словами, колебания частиц поперечной волны происходят перпендикулярно (поперек) направлению распространения волны, а колебания частиц продольной волны – вдоль этого направления.
Продольные волны могут существовать в любых телах – твердых, жидких, газообразных. Поперечные волны могут существовать лишь в твердых телах. Это объясняется тем, что для распространения такой волны необходимо "жесткое" расположение частиц среды, чтобы между ними могли возникать силы упругости.
Волна называется поперечной, если частицы среды колеблются в направлениях, перпендикулярных к направлению распространения волны.
Волна называется продольной, если колебания частиц среды происходят в направлении распространения волны.
В газах и жидкостях, которые не обладают упругостью формы, распространение поперечных волн невозможно. В твердых телах возможно распространение как продольных, так и поперечных волн, связанных с наличием упругости формы.
Каждая волна распространяется с некоторой скоростью. Под скоростью волны понимают скорость распространения возмущения. Скорость волны определяется свойствами среды, в которой эта волна распространяется.
Волна характеризуется рядом параметров:
Длиной волныназывается расстояние, на которое распространяется волна за время, равное периоду колебания в ее источнике. Она равна расстоянию между соседними гребнями или впадинами в поперечной волне и между соседними сгущениями или разряжениями в продольной волне.
При переходе волны из одной среды в другую изменяются скорость и длина волны, а циклическая частота, период и частота при этом не изменяются.
Волновой поверхностью (фронтом волны) называется совокупность точек среды, колеблющихся в одинаковых фазах. На волновой поверхности фазы колебаний различных точек в рассматриваемый момент времени имеют одно и то же значение. В зависимости от формы волновой поверхности различают плоские волна, сферические и т.п.
Поперечные волны могут быть поляризованными и неполяризованными. К неполяризованной волне направление колебаний хаотически изменяется, оставаясь перпендикулярным направлению распространения волны. В поляризованной волне направление колебаний изменяется, подчиняясь определенной закономерности. Простейшим случаем поляризованной волны является плоско поляризованная (линейно поляризованная волна), когда вектор колебаний лежит в одной плоскости.
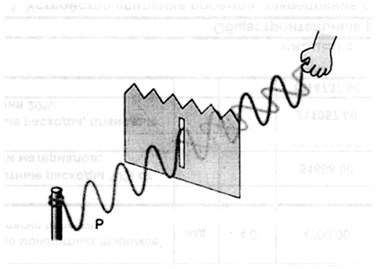
Рис.1.18 иллюстрирует процесс поляризации. Если заставить веревку колебаться в различных направлениях, то после прохождения колебаний через щель останутся только вертикальные колебания.
| Рис.1.18. Модель поляризации волны, щель в экране пропускает колебания веревки только в вертикальной плоскости. |
Лучом называется линия, касательная к которой в каждой точке совпадает с направлением распространения волны. В однородной изотропной среде луч является прямой, перпендикулярной к фронту волны, и совпадает с направлением переноса энергии волны.
Эффект Доплера.Если источник волн и приемник и приемник движутся друг относительно друга, частота, воспринимаемого приемником, не совпадает с частотой источника. Это явление носит название эффекта Доплера.
Эффект Доплера широко используется в медицинской диагностики. При ультразвуковом исследовании с Доплером (доплер УЗИ) используются отраженные звуковые волны для оценки кровотока через кровеносные сосуды (рис.1.19). Это помогает оценить кровоток через основные артерии и вены рук, ног, шеи.
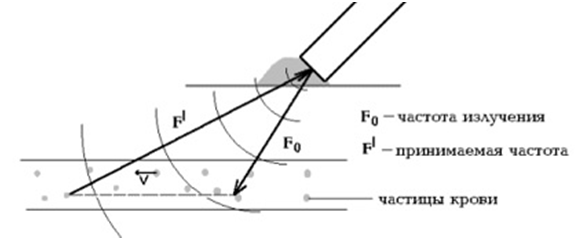
| Рис. 1.19.. Принцип доплер исследования кровотока. |
Затруднения кровотока могут свидетельствовать о различных заболеваниях. Во время доплер УЗИ датчик располагается на коже выше кровеносного сосуда. Датчик посылает и получает звуковые волны, которые усиливаются с помощью микрофона. Звуковые волны отражаются от твердых объектов, включая кровяные клетки. Движение этих клеток вызывает изменение в отраженном звуковом сигнале (эффект Доплера). Исследование может показать затруднение кровотока при наличии сужений в артериях шеи, что может послужить причиной инсульта. Так же могут быть диагностированы сгустки крови в венах ног, которые могут оторваться и нарушить кровоток в легких. Доплеровское УЗИ может использоваться для определения кровотока плода при беременности для того, чтобы проверить здоровье малыша. При отсутствии кровотока нет изменений в передаваемом сигнале. Информация об отражении звуковых волн обрабатывается компьютером, и мы можем видеть графическое изображение движения крови в кровеносных сосудах. Эти изображения могут быть сохранены для будущей оценки и рассмотрения.
Стоячие волны.В бегущей волне колеблющая величина зависит не только от времени, но и от координаты Уравнение плоской одномерной синусоидальной волны имеет вид:  ; где v- скорость распространения волны, А - амплитуда волны,
; где v- скорость распространения волны, А - амплитуда волны,  - начальная фаза колебаний в точке х = 0,
- начальная фаза колебаний в точке х = 0,  – частота.
– частота.  . Величина
. Величина  называется волновым числом. Уравнение записывается как
называется волновым числом. Уравнение записывается как  Если в среде распространяется несколько волн, то колебания частиц среды оказываются геометрической суммой колебаний, которые совершали бы частицы при распространении каждой из волн в отдельности. Волны накладываются друг на друга, не возмущая (не искажая друг друга). Это и есть принцип суперпозиции волн.
Если в среде распространяется несколько волн, то колебания частиц среды оказываются геометрической суммой колебаний, которые совершали бы частицы при распространении каждой из волн в отдельности. Волны накладываются друг на друга, не возмущая (не искажая друг друга). Это и есть принцип суперпозиции волн.
Если две волны, приходящие в какую-либо точку пространства, обладают постоянной разностью фаз, такие волны называются когерентными. При сложении когерентных волн возникает явление интерференции.
Если конец веревки закрепить неподвижно, то отраженная в месте закрепления веревки волна будет интерферировать с бегущей волной. отражаясь от более плотной среды, волна меняет фазу на противоположную и распространяется в обратном направлении. Уравнение обратной волны имеет вид  Интерферируя волны, образуют стоячую волну, уравнение которой
Интерферируя волны, образуют стоячую волну, уравнение которой  . Амплитуда стоячей волны
. Амплитуда стоячей волны  в отличие от амплитуды бегущих волн является периодической функцией координаты x. В бегущей волне фаза колебаний зависит от координаты x рассматриваемой точки. В стоячей волне все точки между двумя узлами колеблются с различными амплитудами, но с одинаковыми фазами(синфазно), так как аргумент синуса в уравнении стоячей волны не зависит от координаты x. Точки ,в которых амплитуда стоячей волны равна 0, называются узлами, а точки где амплитуда двойная –пучности. Будет ли на границе отражения узел или пучность, зависит от соотношения плотностей сред. Если среда, от которой происходит отражение, менее плотная, то в месте отражения получается пучность, если более плотная — узел. Образование узла связано с тем, что волна, отражаясь от более плотной среды, меняет фазу на противоположную и у границы происходит сложение колебаний противоположных направлений, в результате чего получается узел. Если волна отражается от менее плотной среды, то изменения фазы не происходит и у границы колебания складываются с одинаковыми фазами — получается пучность.
в отличие от амплитуды бегущих волн является периодической функцией координаты x. В бегущей волне фаза колебаний зависит от координаты x рассматриваемой точки. В стоячей волне все точки между двумя узлами колеблются с различными амплитудами, но с одинаковыми фазами(синфазно), так как аргумент синуса в уравнении стоячей волны не зависит от координаты x. Точки ,в которых амплитуда стоячей волны равна 0, называются узлами, а точки где амплитуда двойная –пучности. Будет ли на границе отражения узел или пучность, зависит от соотношения плотностей сред. Если среда, от которой происходит отражение, менее плотная, то в месте отражения получается пучность, если более плотная — узел. Образование узла связано с тем, что волна, отражаясь от более плотной среды, меняет фазу на противоположную и у границы происходит сложение колебаний противоположных направлений, в результате чего получается узел. Если волна отражается от менее плотной среды, то изменения фазы не происходит и у границы колебания складываются с одинаковыми фазами — получается пучность.
Положение узлов и пучностей находится из условий: координаты пучностей  , где: m = 0,1, 2,:..; координаты узлов
, где: m = 0,1, 2,:..; координаты узлов  .
.
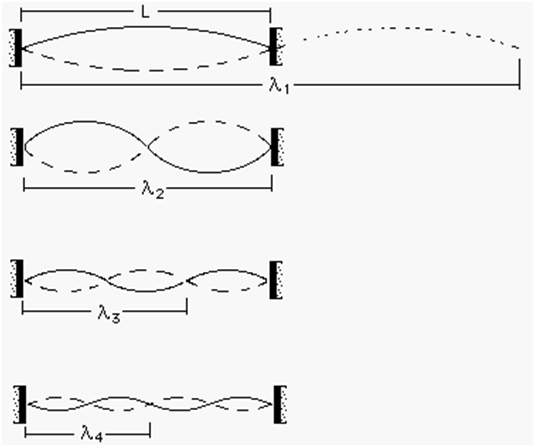
На музыкальном инструменте струна закреплена с обоих концов, которые ограничивают возможные колебания и на которых во время колебаний расположены узлы. Струна, имеющая длину L, образует стоячую волну, длина которой равна удвоенной длине струны (длина волны = 2L), что демонстрируется на первом из рисунков 1.20. При этом узлы расположены на концах струны, а пучность посередине между ними. Это основная мода, ей соответствует самая большая из возможных длин волн. Кроме этой моды могут возникать волны с более короткой длиной волны. При этом минимальная длина волны не ограничена. При переходе через узел фаза колебаний изменяется скачком на π,так как при этом функция cos(kx+α/2) изменяет свой знак на противоположный
| Рис.1.20. Стоячие волны на струне гитары |
Дата добавления: 2021-01-26; просмотров: 207;
Поиск по сайту
Узнать еще
- F68.0 Преувеличение физических симптомов по психологическим причинам
- II. Затраты (времени, физических сил, финансовых средств и т.д.)
- III. Единство и взаимосвязь процессов воспитания и обучения.
- Автоматизация деловых процессов
- Автоматизация процессов управления перевозками
- Автоматизация процессов эксплуатации недвижимости
- Автоматизация технологических процессов асфальтобетонного завода и контроль качества
- Автоматизация технологических процессов на эмульсионных базах и контроль качества эмульсий

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
