Винтовые электромеханические подъемники
Электромеханические подъемники могут быть 1-, 2-, 4-, 6- и 8-стоечными. Напольный подъемник (П-133) (рис. 6.2) состоит из двух коробчатых стоек 1 и поперечины 2. В таком подъемнике вра- щается винт, а гайка неподвижна. По такому же принципу работают 4-стоечные (П-150) и 6-стоечные подъемники (П-142). Они исполь- зуются для взвешивания грузовых автомобилей и автобусов. Управляют работой стоек с передвижного пульта, обеспечивающего синхронную работу.
Существуют конструкции с неподвижными винтами и вращаю- щимися гайками. В таких подъемниках электродвигатель и редуктор устанавливаются на подъемной раме, а вращение гаек осуществляет- ся цепной передачей, смонтированной в пустотелой коробке подъем-
ной рамы. Преимущество винтовых электромеханических подъемни- ков в их надежности и безопасности в работе, простое устройство. Недостатки – низкий КПД, необходимость тщательного ухода за гру- зовыми винтами. Расчет электромеханических подъемников выполня- ется по принципу расчета винтовых домкратов. Но имеются и свои особенности. В подъемниках с вращающимся ходовым винтом для исключения воздействия изгибающих моментов на грузоподъемную гайку применяют опорные ролики (рис. 6.3).
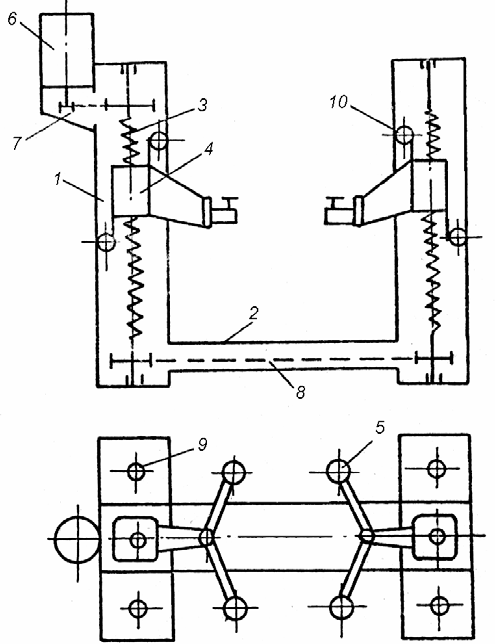
Рис. 6.2. Винтовой электромеханический подъемник: 1 – стойка;
2 – поперечина; 3 – винт; 4 – гайка; 5 – подхват; 6 – электродвигатель; 7 – редуктор; 8 – цепная передача; 9 – анкерный болт
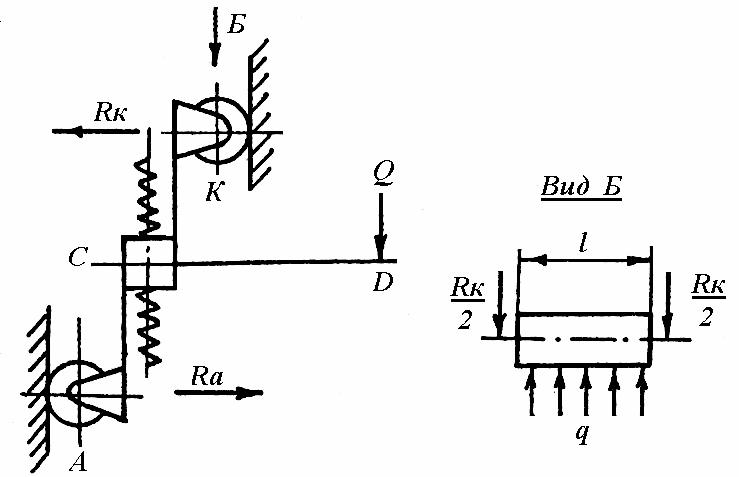
Рис. 6.3. Схема действия сил на опорные ролики
Нагрузку на один винт находят по формуле:
Q = GвКр/n, (6.16)
где n – число стоек; Gв – масса автомобиля, Н; Кр = 1,1…1,3 – коэф. неравномерности распределения силы веса по стойкам. Большее значение берется для 4-стоечных, а меньшее – для 2-стоечных подъемников.
Длина плеча подхвата:
CD = 1/4B + L, (6.17)
где В – ширина автомобиля; L = 0,25…0,4 – запас по ширине. Мень- шее значение L принимают для легковых автомобилей.
Диаметры роликов d берутся в пределах 0,05…0,07 м. Можно задаться расстоянием АK и определить длину роликов. Обычно А =
= (0,3…0,5)CD;
CK = (0,5…0,7)АK.
Силы, действующие на ролик, определяют исходя из системы уравнений:
⎧åМа=Rк×АK -Q×CD =0,
(6.18)
⎨å Х = R - R = 0.
⎩ а п
Отсюда: Rк = Q·CD/AK. Rк = Ra независимо от соотношения раз- меров АK и СK. Если поверхность ролика не обработана термически, его рассчитывают на смятие. В каждой стойке размещается ходовой винт 3, по которому перемещается грузоподъемная гайка 4 с раз- движными подхватами 5. Ходовые винты приводятся во вращение от электродвигателя 6 через редуктор 7, установленный на одной из стоек. Вращение на другой винт передается с помощью цепной пе- редачи 8, смонтированной внутри поперечины 2. Подъемник крепит- ся к полу анкерными болтами 9. Упорные ролики 10 освобождают винт от изгибающих усилий.
В этом случае по результатам расчетов ролики по длине и диа- метру получаются очень большими. Поэтому контактирующие поверх- ности подвергают термообработке и рассчитывают по контактным на- пряжениям:
[sк ] £ 0,418
q × Eпр/rпр,
(6.19)
где Епр = 2Е1·Е2/Е1 + Е2 – приведенный модуль упругости; rпр и qпр –
приведенные радиус кривизны и нагрузка.
Если ролик и направляющие изготовлены из одинакового мате- риала, то:
Епр = Е1 = Е2, 1/rпр = 1/r1 + 1/r2, (6.20) где r1 – радиус ролика; r2 – радиус направляющей. Если r2 = ¥, то 1/rпр = 1/r1.
После подстановки полученных результатов в уравнение (6.19) и замены r1 через d/2 распределенная нагрузка определяется по формуле:
q £ [sк]2·d/2·0,174·Е·S, (6.21)
где S = 1,2…1,3 – коэф. запаса; [sк] = 2,8 sт – при объемной закалке;
[sк] = 50·HRC, МПа – при закалке ТВЧ; [sк] = 40·HRC, МПа – при це- ментации и азотировании поверхностей; HRC – твердость по Роквел- лу. Для качественных конструкционных сталей sт = 650 МПа, а после термообработки HRC = 45…50 ед.
Длина ролика:
l = Rк/q. (6.22)
Ролики при качении по направляющим создают усилие на винте:
Qg = Rк·f·z, (6.23)
где f = 0,01 – коэф. трения качения; z – число роликов в стойке.
Уточненное усилие на винте:
Qу = Q + Qg. (6.24)
Далее расчет аналогичен расчету винта домкрата. Длину винта принимают равной высоте подъема автомобиля. Винт на устойчи- вость не рассчитывают, так как обычно он выполняется висячим, с опорой в верхней его части (рис. 6.4).
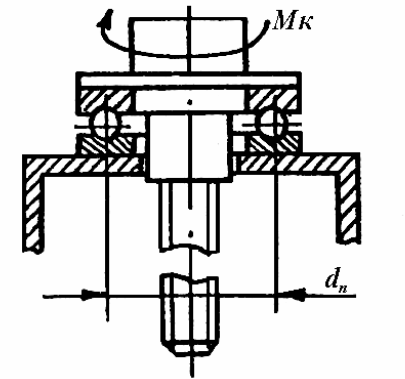
Рис. 6.4. Конструктивное исполнение верхней опоры грузового винта
В качестве опоры используются упорные или радиально-упор- ные подшипники, или сборные узлы специальной конструкции. Расчет крутящего момента, прилагаемого к винту на упорном подшипнике, определяется по формуле:
Мкр = Qу·dср/2·tg(a + j) + Qу·f·dн/2, (6.25) где f = 0,01 – коэф. трения; dн – диаметр дорожки тел качения упорного подшипника. Если частота вращения вала мала, подбор подшипника ведется по статической грузоподъемности Qс > Qу. Скорость вращения винта V = 1,5…2 м/мин.
Частоту вращения винта находят через шаг резьбы винта р по формуле:
n = V/р. (6.26)
Задаваясь частотой вращения ротора электродвигателя 750, 1000, 1500 или 3000 об/мин, определяют передаточное число от элек- тродвигателя к винту:
i = nдв/n. (6.27)
Если i £ 4, можно использовать для передачи момента от элек- тродвигателя к винту клиноременную передачу. В противном случае подбирают редуктор.
Мощность электродвигателя (кВт) одной стойки определяется по формуле:
N = Mкр·w/hм = Mкр·p·n/30hм, (6.28)
где hм – механический КПД трансмиссии.
Для клиноременной передачи hм = 0,96. Если установлен редук- тор, принимается hм, по справочнику [17]. Если на несколько стоек ис- пользуется один привод, а ходовые винты соединены цепной переда- чей, то мощность находят по формуле:
Nм = z·N/hц, (6.29)
где z – число стоек; hц – КПД цепной передачи.
Пример оформления расчетов и графической части – в [18].
Вопросы по главе 6
1. Какие элементы домкратов и винтовых подъемников требуют расчета?
2. Что является условием устойчивости винтовых домкратов?
3. Что является условием самоторможения винта?
4. В чем заключаются особенности винтовых электромеханических подъем- ников? Рассчитывают ли винт подъемника на устойчивость?
5. В каком случае необходим подбор редуктора для грузового винта?
6. По каким критериям осуществляется подбор подшипника для винта?
Дата добавления: 2022-04-12; просмотров: 648;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по географии

Публикации по медицине
