Координаты центра тяжести.
Силу тяжести фактически можно считать системой параллельных сил, поэтому для нее применимы все выше приведенные формулы.
Если тело является однородным, т.е. плотность его в любой точке тела одинакова, получаем, что вес элементарного объема тела определяется по формуле:
 , (1.20)
, (1.20)
где  - плотность тела,
- плотность тела,
 - объем i-ой части тела.
- объем i-ой части тела.
Тогда координата точки С по оси Х (остальные координаты находятся аналогично):
 , (1.21)
, (1.21)
Если тело является плоским и однородным, то:
 , (1.22)
, (1.22)
где  - площадь i-ой части тела.
- площадь i-ой части тела.
1.1.11. Трение
Трение скольжения
В местах контакта реальных тел возникает сила, сопротивляющаяся взаимному смещению контактирующих поверхностей – сила трения. Она всегда направлена по касательной к контактирующим поверхностям и всегда стремится препятствовать суммарной внешней силе.
Важнейшее свойство сил трения - это то, что они не могут вызывать движения. При отсутствии внешних сил, сила трения всегда равна нулю. При достаточно малой суммарной внешней силе, сила трения будет в точности равна ей по модулю и противоположна по направлению. При возрастании внешних сил, сила трения может их компенсировать только до определенного момента, а затем состояние равновесия тела нарушается и оно приходит в движение.
Состояние тела, когда малейшее увеличение внешней силы вызовет нарушение равновесия тела называют предельным равновесием, а сила трения, действующая на тело в этот момент времени предельной силой трения.
Величина предельной силы зависит от многих факторов: от материала контактирующих тел, от чистоты обработки контактирующих поверхностей, от температуры окружающей среды и т.д., но примерно можно определить предельную силу трения, как:
 , (1.23)
, (1.23)
где  - статический коэффициент трения, зависящий только от материала и состояния контактирующих тел, определяемый экспериментально;
- статический коэффициент трения, зависящий только от материала и состояния контактирующих тел, определяемый экспериментально;
 - величина нормального давлении между контактирующими поверхностями.
- величина нормального давлении между контактирующими поверхностями.
Конус трения.
Рассмотрим предельное равновесие тела (пренебрегая его собственным весом), покоящегося на шероховатой поверхности и к которому приложена некоторая сила Р (рис. 1.20).
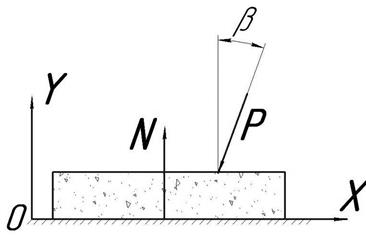
Рис. 1.20
Составим уравнения равновесия

 , (1.24)
, (1.24)
Учитывая определение предельной силы трения, найдем величину силы  из уравнения (1.23) и подставим в уравнение (1.24):
из уравнения (1.23) и подставим в уравнение (1.24):
 , (1.25)
, (1.25)
а поскольку  и
и  , то в случае предельного равновесия должно выполняться равенство
, то в случае предельного равновесия должно выполняться равенство
 или
или  . (1.26)
. (1.26)
Угол, определяемый соотношением (1.26), называют предельным углом трения. Если к телу прикладывать какую угодно большую силу, но под углом меньшим предельного угла b, то нарушить состояние покоя тела невозможно.
Если рассмотреть пространственную задачу, то получим предельный конус трения, показывающий, что, если сила действует внутри этого конуса, тело сохранит состояние покоя. В технике такое явление называется заклиниванием механизма.
Трение качения
Рассмотрим цилиндрическое тело, покоящееся на шероховатой поверхности к которому приложена некая внешняя сила Р (рис. 1.21. а).
Силы Р и Fтр образуют пару сил с моментом  , который ничем не компенсирован и, следовательно, при любой малой силе Р должно начинаться движение тела. Но на практике это не так. Тело начнет движение только при определенном значении силы Р.
, который ничем не компенсирован и, следовательно, при любой малой силе Р должно начинаться движение тела. Но на практике это не так. Тело начнет движение только при определенном значении силы Р.
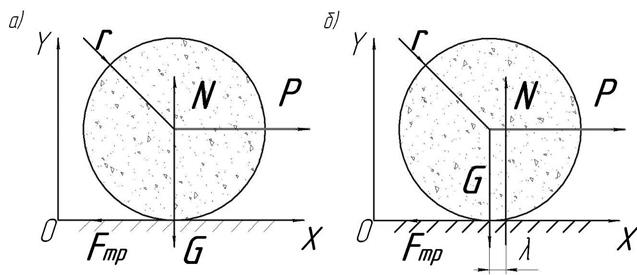
Рис. 1.21
Это объясняется тем, что у реальных тел контакт осуществляется не в точке, а всегда по определенной поверхности и поэтому реакцию N необходимо прикладывать не к середине поверхности контакта, а на ее краю (рис. 1.21. б). В этом случае силы N и G образуют пару сил, противодействующую паре сил Р и Fтр.
Момент пары сил N и G называют моментом трения качения, а в случае предельного равновесия это будет предельный момент трения качения:
 , (1.27)
, (1.27)
где l - коэффициент трения качения, зависящий только от материала контактирующих тел, определяемый экспериментально.
Физический смысл коэффициента трения качения заключается в том, что он представляет собой полуширину поверхности контакта (рис. 1.21. б).
Также как и силы трения скольжения, силы трения качения всегда противодействуют суммарному моменту внешних сил.
Поскольку для материалов  , то потери энергии при трении качения меньше, чем при скольжении поэтому желательно заменять скольжение качением.
, то потери энергии при трении качения меньше, чем при скольжении поэтому желательно заменять скольжение качением.
При решении задач на трение после определения реакций связи, включающих Fтр и Мтр, необходимо дополнительно проверять выполнение условий:
 и
и  , (1.28)
, (1.28)
Если эти условия не выполняются, то равновесие невозможно.
1.1.12. Пример решения задачи на использование условий равновесия
плоской системы сходящихся сил.
Определить реакции стержней, удерживающих грузы F1 и F2 (рис. 1.22). Массой стержней пренебречь. Выполним проверку полученных результатов графическим и аналитическим способами. Числовые данные варианта взять из приложения 1. Схему варианта из приложения 2.
Схема нагружения и исходные данные
F1 = 0,5 кН,
F2 = 0,8 кН
Рис. 1.22.
Решение
Составим расчетную схему, для чего избавимся от связей. Проведем оси координат, причем ось х проходит через неизвестную внутреннюю силу (рис. 1.23).
Рис. 1.23.  Составим систему уравнений равновесия плоской
Составим систему уравнений равновесия плоской
системы сходящихся сил и решим ее.


 ∑Fix=0 N1 + N2cos 300 + F1cos600 + F2cos600=0
∑Fix=0 N1 + N2cos 300 + F1cos600 + F2cos600=0
∑Fiy=0 - N2cos 600 + F1cos300 - F2cos300=0
| |

 N1 = - N2cos 300 - F1cos600 - F2cos600
N1 = - N2cos 300 - F1cos600 - F2cos600
N2 = (F1cos300 - F2cos300)/cos 600
 |

 N1 = -N2∙0,866 - 0,5∙0,5 - 0,8 ∙ 0,5 N1= - 0,2 кН
N1 = -N2∙0,866 - 0,5∙0,5 - 0,8 ∙ 0,5 N1= - 0,2 кН
N2 = (0,5∙0,866 - 0,8 ∙ 0,866)/0,5 N2= -0,5 кН
Знак «–» указывает на то, что стержни АВ и СВ сжаты.
Проверка аналитическим способом.
Рис. 1.24.
Выберем новую систему координат (рис. 1.24) и составим новую систему уравнений равновесия.



 ∑Fix=0 N1cos 300 + N2 + F2cos300 = 0 N2 = - N1cos 300 - F2cos300
∑Fix=0 N1cos 300 + N2 + F2cos300 = 0 N2 = - N1cos 300 - F2cos300
 ∑Fiy=0 F1 - F2cos 600+ N1cos 600 = 0 N1 = (F2cos600 - F1)/cos600
∑Fiy=0 F1 - F2cos 600+ N1cos 600 = 0 N1 = (F2cos600 - F1)/cos600


 N2 = -N1∙0,866 - 0,8∙0,866 N2 = - 0,5 кН
N2 = -N1∙0,866 - 0,8∙0,866 N2 = - 0,5 кН
N1 = (0,8∙0,5-0,5)/0,5 N1 =- 0,2 кН
Ответы совпадают, следовательно, задача решена верно.
Проверка графическим способом. Построим силовой многоугольник (рис. 1.25), для чего из точки В, в масштабе отложим отрезок ВА соответствующий величине силы F2. Из конца отрезка ВА отложим под углом 600 отрезок АС соответствующий величине силы F1, вследствие того что угол между линиями действия сил F1 и F2 составляет 600. Так как величины сил N1 и N2 неизвестны, то построим прямые а и в, причем отложим прямую а под углом 900 к отрезку АС, прямую в по углом 1200 к отрезку ВА. Прямые а и в пересекутся в точке D. Длина отрезка CD соответствует силе N2, а длина отрезка DВ силе N1. Переведя в масштабе длины отрезков CD и DВ получим числовые значения искомых сил. N1=0,2 кН; N2=0,5 кН.
Рис. 1.25.
1.1.13. Пример определения реакций опор двухопорной балки.
На использование условий равновесия плоской произвольной системы сил.
Определить реакции опор двух опорной балки (рис. 1.26). Выполнить проверку. Числовые данные варианта взять из приложения 3. Схему варианта из приложения 4.
 Схема нагружения и исходные данные.
Схема нагружения и исходные данные.
q = 4,5 н/м.
F = 65 Н.
М = 45 Н∙м.
Рис. 1.26.
Решение.
Составим расчетную схему.
Рис 1.27.
Преобразуем распределенную нагрузку q в сосредоточенную силу Rq и определим ее величину: Rq = 4 ∙ 4,5 = 18 [Н].
Составим систему уравнений равновесия произвольной плоской системы сил и решим ее.

 ∑Fix = 0 RАХ + Fcos300 = 0
∑Fix = 0 RАХ + Fcos300 = 0
 ∑Fiy = 0 RАY - Fcos600 - Rq + RBY = 0
∑Fiy = 0 RАY - Fcos600 - Rq + RBY = 0
∑МА = 0 RBY∙10 + M - Fcos600 ∙ 7- Rq ∙ 2 = 0
 RАХ = - 65 ∙ 0,866 RАХ = -56,29 Н
RАХ = - 65 ∙ 0,866 RАХ = -56,29 Н
RАY = 65 ∙ 0,5 + 18 - RBY RАY = 28,65 Н
RBY = (- 45 + 65 ∙ 0,5 ∙7 + 18 ∙ 2)/10 RBY = 21,85 Н
Отрицательное значение реакции RАХ указывает на то, что ее направление было выбрано не верно, то есть необходимо на расчетной схеме направить ее в противоположную сторону.
Проверка.
Составим уравнение моментов относительно точки К.
∑МК = 0
RBY∙3 + М + Rq∙5 - RАY∙7 = 0
21,85 ∙ 3 + 45 + 18 ∙ 5 - 28,65 ∙ 7 = 0
0 = 0
Результат свидетельствует о том, что задача решена верно.
Кинематика
Кинематика определяет основные характеристики движения тел и взаимосвязь этих характеристик. В основу кинематики положены аксиомы геометрии и понятие векторного пространства.
Состояние движения – изменение точками тела своего положения в выбранной системе координат с течением времени.Состояние движения относительно, поскольку тело может покоиться в одной системе координат и двигаться в другой системе.
Характеризовать движение можно только после предварительного выбора системы координат. Используя разные системы координат, можно характеризовать движение одним из следующих способов:
1.2.1. Векторный способ задания движения
Рассмотрим плоское движение, определим характеристики движения.
Одной из основных задач механики является прогнозирование поведения тела при заданных начальных условиях, а это предполагает способность точно указать положение каждой точки тела в любой последующий момент времени.
Рассмотрим движущуюся материальную точку М (рис. 1.28).
Положение точки в любой момент времени можно определить вектором  , проведенным из начала координат в ту точку пространства, в которой находится в настоящий момент времени рассматриваемая материальная точка. Такой вектор называется радиус-вектором. Радиус-вектор определяется координатами
, проведенным из начала координат в ту точку пространства, в которой находится в настоящий момент времени рассматриваемая материальная точка. Такой вектор называется радиус-вектором. Радиус-вектор определяется координатами  . Положению точки в любой момент движения соответствует определенный радиус-вектор.
. Положению точки в любой момент движения соответствует определенный радиус-вектор.
Векторный закон движения материальной точки – это зависимость координат точки от времени  (первая и основная характеристика движения).
(первая и основная характеристика движения).
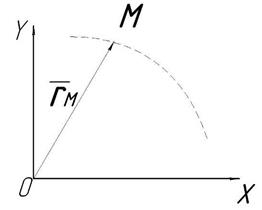
Рис. 1.28
В процессе движения материальная точка последовательно переходит из одной точки пространства в другую. Если соединить эти точки, то получится плавная пространственная кривая (пунктирная линия на рис. 1.28).
Траектория – это пространственная кривая, на которой находится материальная точка в любой момент движения (вторая характеристика движения). Чтобы получить уравнение траектории необходимо из закона движения исключить время.
Скорость
В некоторый момент времени t0 положение точки характеризует радиус-вектор  , а через некоторое время
, а через некоторое время  в момент t1=t0+
в момент t1=t0+ 
 (рис. 1.29). Если через концы векторов и
(рис. 1.29). Если через концы векторов и  провести новый вектор
провести новый вектор  , то получим равенство
, то получим равенство
 . (1.29)
. (1.29)
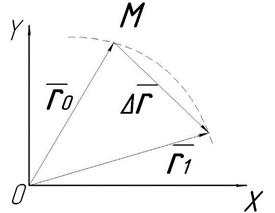
Рис. 1.29
Средняя скорость движения - это изменение положения материальной точки за промежуток времени, в течение которого это изменение произошло:
 (1.30)
(1.30)
Мгновенная скорость (в дальнейшем просто скорость) - это предел средней скорости при бесконечном уменьшении промежутка времени наблюдения, т. е.:
 .(1.31)
.(1.31)
Таким образом, скорость – это первая производная от закона движения по времени (третья характеристика движения). Скорость является векторной величиной, и ее направление совпадает с направлением вектора в его предельном положении, т. е. вектор скорости всегда располагается на касательной к траектории движения и направлен в ту сторону, куда происходит движение. Чтобы определить, величину скорости (модуль), необходимо разложить вектора  и
и  на составляющие в выбранной системе координат, т.е. представить
на составляющие в выбранной системе координат, т.е. представить  и
и  .Тогда между компонентами скорости и радиус-вектора положение точки должно выполняться соотношение:
.Тогда между компонентами скорости и радиус-вектора положение точки должно выполняться соотношение:
 (1.32)
(1.32)
В этом случае модуль скорости можно определить как:
 (1.33)
(1.33)
Ускорение
В некоторый момент времени t0 материальная точка находится в положении А и имеет скорость  , а через некоторое время
, а через некоторое время  в момент t1 = t0 +
в момент t1 = t0 +  - в положении В и имеет скорость
- в положении В и имеет скорость  (рис. 1.30). Если вектор
(рис. 1.30). Если вектор  перенести в точку А (обозначено пунктиром на рис. 1.30), а через концы векторов
перенести в точку А (обозначено пунктиром на рис. 1.30), а через концы векторов  и
и  провести новый вектор
провести новый вектор  , то получим векторное равенство
, то получим векторное равенство
 . (1.34)
. (1.34)
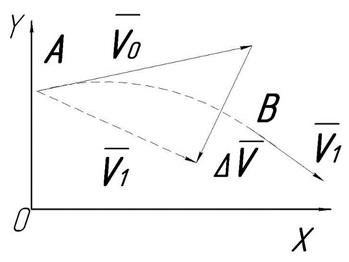
Рис. 1.30
Среднее ускорение движения - это изменение скорости материальной точки за промежуток времени, в течение которого это изменение произошло:
 (1.35)
(1.35)
Мгновенное ускорение (в дальнейшем, просто ускорение) – это предел среднего ускорения при бесконечном уменьшении промежутка времени наблюдения, т. е.
 . (1.36)
. (1.36)
Таким образом, ускорение – это первая производная от скорости или вторая производная от закона движения по времени (четвертая характеристика движения). Ускорение является векторной величиной и ее направление совпадает с направлением вектора 
 в его предельном положении, т. е. вектор ускорения всегда располагается с той стороны от касательной к траектории движения, что и сама траектория.
в его предельном положении, т. е. вектор ускорения всегда располагается с той стороны от касательной к траектории движения, что и сама траектория.
Аналогично скорости компоненты вектора ускорения можно представить через компоненты вектора скорости и компоненты радиус – вектора положения точки:
 , (1.37)
, (1.37)
В этом случае модуль ускорения можно определить как:
 (1.38)
(1.38)
Движение материальной точки определяется четырьмя основными характеристиками: законом движения, траекторией, скоростью и ускорением.
1.2.2. Естественный способ задания движения
Данный способ применяется только в том случае, когда известна траектория движения.
Для задания движения применяется прямоугольная естественная система координат (рис. 1.31), которая характеризуется тем, что:
- начало координат всегда совпадает с положением материальной точки;
- первая ось (ось τ) всегда располагается на касательной к траектории движения и направлена в ту сторону, куда движется материальная точка (касательная);
- вторая ось (ось η) всегда располагается на нормали к траектории движения (всегда перпендикулярна касательной к траектории и находится в плоскости движения (если движение пространственное - то в соприкасающейся плоскости) и направлена в сторону вогнутости траектории (нормаль);
- третья ось (ось β) всегда располагается на бинормали к траектории (т.е. перпендикулярна и касательной, и нормали) и направлена так, чтобы образовывать с первой и второй осью правую систему координат (бинормаль).
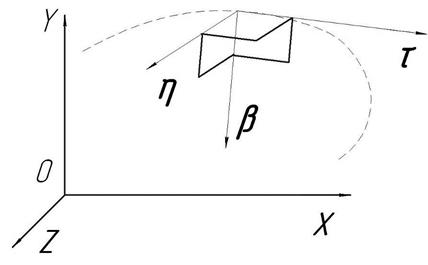
Рис. 1.31.
Зависимость расстояния по времени от текущего положения точки до некоторого начального, измеренного вдоль траектории, S(t) является естественным законом движения.
В этом случае для скорости справедливо соотношение:
 , (1.39)
, (1.39)
Разложив по осям вектор скорости в естественной системе координат, получим:
 , (1.40)
, (1.40)
Вектор скорости проецируется только на одну ось – ось τ.
А вектор ускорения будет проецироваться только на две оси - ось τ и ось η, а третья проекция  .
.
Величины проекций ускорения  и
и  определяются по системе уравнений:
определяются по системе уравнений:
 , (1.41)
, (1.41)
где  - радиус кривизны траектории.
- радиус кривизны траектории.
Связь между компонентами скоростей и ускорений
Поскольку вектора скорости и ускорения в каждый момент времени определяются равнозначно, то между их компонентами при разложении в различных системах координат будут иметь место следующие зависимости:
 , (1.42)
, (1.42)
 , (1.43)
, (1.43)
Дифференцируя первое из приведенных выражений получаем:
 . (1.44)
. (1.44)
Дата добавления: 2022-05-27; просмотров: 115;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
