Дополнительные устройства для улучшения устойчивости
Сопротивление, заземляющее нейтраль трансформатора, как средство улучшения устойчивости. В электрических сетях 110 кВ и выше нейтрали трансформаторов глухо заземляются. Если нейтрали трансформаторов зазем-
лить через небольшое активное сопротивление, не повышающее заметно напряжения на нейтрали, то условия работы изоляции не меняются, а устойчивость системы при несимметричных КЗ существенно увеличивается.
При замыканиях на землю в активных сопротивлениях возникают потери мощности, которые повышают нагрузку генераторов и тем самым компенсируют уменьшение мощности, передаваемой в систему.
Рассмотрим систему (рис. 5.4).
Рис. 5.4. Заземление нейтрали трансформаторов через активное сопротивление
Схема замещения нулевой последовательности системы передачи будет выглядеть, как на рис. 5.5.
Рис. 5.5. Схема замещения нулевой последовательности
Сворачивая эту схему, можно получить результирующее комплексное сопротивление нулевой последовательности. Активное сопротивление нуле-вой последовательности R0 в схеме системы при однофазном КЗ и обусловливает появление дополнительных потерь активной мощности, нагружающих генератор (рис. 5.6).
При небольших активных сопротивлениях потери мощности возрастают почти пропорционально значению сопротивления, и коэффициент запаса динамической устойчивости значительно повышается.
Рис. 5.6. Комплексная схема замещения системы при однофазном коротком замыкании
Однако увеличение потерь оказывается благоприятным лишь до известного предела. Чрезмерно большие потери могут снова привести к ухудшению устойчивости.
При включении же индуктивного сопротивления в нейтраль трансформатора возрастает результирующее сопротивление (индуктивное) нулевой последовательности, и устойчивость системы повышается. Для обеспечения устойчивости оказывается возможным ограничиться сравнительно небольшим значением индуктивного сопротивления в нейтралях. Заземление нейтралей трансформаторов через индуктивное сопротивление, как правило, менее эффективно.
При решении вопроса о заземлении нейтрали повышающих и понижающих трансформаторов необходимо иметь в виду, что вследствие большого индуктивного сопротивления нулевой последовательности линии электропередачи, характер заземления нейтрали повышающих трансформаторов не оказывает почти никакого влияния на устойчивость при замыканиях на землю в конце линии электропередачи и, наоборот, играет большую роль при замыканиях в начале линии. Точно так же заземление нейтрали понижающих трансформаторов существенно лишь при замыканиях на землю в конце линии.
Заземление нейтрали через активные и индуктивные сопротивления
приводит к повышению устойчивости и при двухфазных замыканиях на землю, хотя и меньшему, чем при однофазных КЗ.
Положительные результаты применения активных сопротивлений в нейтрали трансформатора не распространяются на трехфазные КЗ.
Электрическое (электродинамическое) торможение (ЭТ) – способ сохранения динамической устойчивости ЭЭС путем гашения части избыточной кинетической энергии за счет подключения специальных нагрузочных резисторов (НР). Существуют два способа включения НР: последовательное (рис. 5.7, а) и параллельное (рис. 5.7, б).
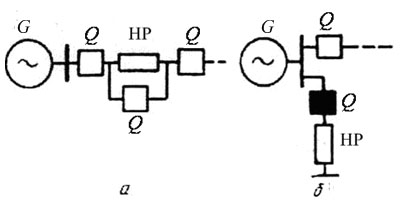
Рис. 5.7. Схема включения нагрузочных резисторов:
а –последовательное; б – параллельное
Некоторым недостатком (последовательного и параллельного торможения) является снижение мощности, передаваемой в приемную систему при несимметричных КЗ и после их отключения. Практическая реализация возможностей, осуществляемых с применением нагрузочных резисторов, связана с необходимостью своевременного отключения сопротивлений с тем, чтобы не произошло нарушение устойчивости во втором цикле качаний, подобно тому как это может иметь место при заземлении нейтрали трансформаторов через неоправданно большие сопротивления. Момент отключения зависит от
вида и места повреждения. Влияние на характер переходного процесса оказывает разброс во времени отключения поврежденных цепей, а также включение и последующее отключение нагрузочных резисторов.
Улучшение устойчивости путем поглощения избыточной мощности, развиваемой первичным двигателем в дополнительных нагрузочных сопротивлениях, включаемых при сбросе мощности во время аварии или после нее, было рассмотрено.
Эффект от последовательного включения зависит от значения токов, протекающих по НР, от параллельного – определяется уровнем напряжения на НР и близости места КЗ к генератору. Последовательное включение НР возможно со стороны нейтрали обмотки генератора.
Особые требования предъявляются к коммутирующей аппаратуре, так как скорость подключения НР определяет качество переходного процесса (собственное время включения выключателя 0,04–0,06 с). При этом необходима высокая надежность выключателей, потому что от нее зависит динамическая устойчивость всей системы.
Эффект от применения ЭТ достигается за счет частичного уменьшения энергии ускорения, хотя он не всегда реализуется, и увеличения энергии торможения. Соотношение энергий ускорения и торможения ротора показано на рис. 5.8.
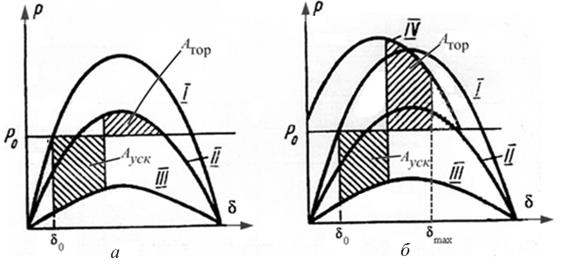
Рис. 5.8. Соотношение энергий (площадок) ускорения и торможения ротора:
а – динамический переход без ЭТ; б – динамический переход с ЭТ; угловая характеристика мощности: I – нормальный режим; II – послеаварийный режим; III – аварийный режим;
IV – при включенных тормозных сопротивлениях
Различают однократное ЭТ, служащее для повышения только динамической устойчивости в переходном режиме, и многократное, т. е. последовательное подключение и отключение НР на разное время, позволяющее обеспечить переход к послеаварийному режиму. В этом случае появляется дополнительное время, используемое для успешной работы автоматики, воздействующей на снижение мощности передающей станции (для гидротурбин это время составляет 5 –10 с).
Нагрузочные резисторы бывают металлическими, с воздушным и масляным охлаждением, и бетэловыми (электротехнический бетон) мощностью от 400 до 2000 МВт. Однако этот способ используется только частично на некоторых ГЭС.
Специальные устройства управления. Электромеханические переходные процессы обусловлены возникновением небалансов активной мощности на валах СМ в аварийных ситуациях. Успешно решать задачи управления такими режимами невозможно без развития новых средств быстрого регулирования активной мощности в ЭЭС.
В связи с тем, что небалансы ∆Р определяются разностью между активной мощностью турбины Рт и электромагнитной мощностью Рэл, отдаваемой генераторами в сеть, способы управления электромеханическими переходными процессами можно классифицировать по влиянию на эти два параметра.
Помимо традиционных способов управления (отключение генераторов, деление системы, импульсная разгрузка турбин ТЭС, форсировка и расфорсировка возбуждения, электрическое торможение, регулирование мощности нагрузки и т. п.), разрабатываются и совершенствуются новые способы управления активной мощностью. Среди них отметим применение аккумуляторов энергии с использованием явления сверхпроводимости, импульсной разгрузки турбин гидрогенераторов и фазовое управление.
Накопители энергии (НЭ) в зависимости от их технических характеристик (мощности и энергоемкости) могут использоваться для демпфирования нерегулярных колебаний на межсистемных связях (энергоемкость 109 –
1010 Дж) и для регулирования активной мощности в переходных режимах (107–108 Дж). По мнению разработчиков, широкими возможностями будут обладать сверхпроводящие индуктивные накопители (СПИН), способные с минимальными потерями длительное время хранить энергию в магнитном поле. Важная особенность СПИН – возможность быстро менять режим работы (потребление и выдача мощности) за время, меньшее чем период промышленной частоты напряжения. Это и обусловливает многофункциональные возможности СПИН. Первый промышленный СПИН энергоемкостью 30 МДж введен в эксплуатацию в США в 1982 г. для стабилизации перетока по протяженной ЛЭП. В СССР первая экспериментальная работа, показавшая технические возможности СПИН, опубликована в 1971 году.
Управление мощностью турбин ГЭС во время аварий в переходном режиме является нерешенной в общем виде проблемой. На практике используется способ отключения генераторов, который в свою очередь влечет за собой задачи, связанные с большими единичными мощностями агрегатов; соединением их в блок (при этом автоматика имеет возможность отключать только два или три генератора одновременно). Это требует отключения значительной мощности потребителей балансировочной автоматикой на время (0,5 с), необходимое для восстановления схемы, синхронизации и набора мощности отключенными генераторами.
Трудности аварийного управления мощностью гидротурбины обусловлены сложностью изменения параметров потока воды, оказывающего давление на лопатки. Для этого предлагаются следующие технические решения: экстренное управление дефлекторами (отклонителями) струй воды (для ковшовых турбин) или направляющим аппаратом (НА). Однако здесь опасен положительный гидроудар (закрытие НА приводит к кратковременному, но значительному увеличению мощности турбины – до 30 %). Разрабатываются оригинальные способы аварийного управления мощностью турбин (АУМТ), связанные с отводом части воды от турбин в специальный резервуар или сразу в нижний бьеф. Объем отводимой воды зависит от энергии, которую необходимо погасить.
Среди способов управления мощностью особое место занимает фазовое управление (целенаправленное изменение фаз режимных параметров, в частности фазы напряжения). Этот способ используют для регулирования внутренних потенциальных возможностей самой электроэнергетической системы за счет принудительного изменения фаз напряжений.
Аварийное регулирование паровых турбин дает существенный эффект лишь в том случае, если оно осуществляется в тесной взаимосвязи с регулированием возбуждения турбогенераторов, т. е. с форсированием возбуждения, согласованным управлением возбуждения турбогенератора и механической мощностью его турбины от одного комплексного управляющего устройства.
Дополнительным устройством, повышающим устойчивость, являются вставки постоянного тока (ВПТ). ВПТ − электропередачи постоянного тока (ППТ), имеющие выпрямительное и инверторное устройство и линию постоянного тока, длина которой l может быть любой.
При l > 0 вставка передает энергию на расстояние и выполняет ряд других функций. Эти же функции выполняются при l ≈ 0.
Достоинства ВПТ:
1. Возможность связи систем (подсистем), имеющих разные частоты.
2. Быстрое регулирование потока мощности, включая изменение его направления.
3. Снижение уровня токов короткого замыкания в подсистемах, имеющих ВПТ.
4. Уменьшение взаимного влияния связываемых подсистем, и в этом смысле обеспечение устойчивости во всей системе.
Недостатки ВПТ:
1. Потери энергии (более 5 % от проходящей через вставку).
2. Появление высших гармонических составляющих в напряжении и соответственно в токе.
3. Необходимость в дополнительных источниках реактивной мощности.
4. Значительная стоимость сооружения (0,06–0,1 млн руб./МВт) и расходы по его эксплуатации.
Упомянутые достоинства функции ВПТ имеют соответственно такие альтернативы: жесткое поддержание частоты в связываемых системах. Однако французская и другие европейские энергосистемы, имея ВПТ, успешно работают параллельно при условии, что отклонение частоты не превосходит 0,01 Гц. Следует сопоставлять эти альтернативы, учитывая убытки от некачественной частоты у потребителя.
Однако могут быть случаи, когда ВПТ не имеют альтернативы:
1. Если надо связать между собой системы, заведомо работающие или могущие работать в определенное время с разными частотами. Например, в Японии (частота 50 и 60 Гц), в США – удаленные, несинхронно работающие системы, вставка между энергосистемами России и Финляндии в г. Выборге и т. д.
2. Регулирование источников энергии и применение регулируемых под нагрузкой трансформаторов, в частности поперечно-регулируемых.
3. Ограничение токов КЗ или усиление выключателей.
4. Усиление устойчивости за счет ряда мероприятий.
В связи с отмеченным ВПТ надо считать, при l ≈ 0 или l > 0, средством управления режимом, применяемым в исключительных, специально
обоснованных случаях.
В обычных случаях система переменного тока любой сложности может быть полностью управляема.
Широко применять вставки, создавая подсистемы с разными частотами внутри единой системы, неправильно. Однако возможно, что в будущем на развитую сеть сверхвысокого напряжения системы переменного тока с фиксированной неизменной частотой будет наложена сеть постоянного тока, и в этом сочетании ВПТ найдут свое место.
Кроме того, небаланс мощности ∆Р можно скомпенсировать путем уменьшения мощности первичного двигателя.
Если бы регуляторы турбин были безынерционными и вся система регулирования турбины могла следить за изменениями электрической мощности, то избыточные моменты всегда были бы устранены и возможность нарушения устойчивости исключена.
Аварийное управление мощностью турбин (АУМТ) – способ сохранения динамической устойчивости избыточных ЭЭС путем управления переходными электромеханическими процессами непосредственным изменением механической мощности турбины. Таким образом, АУМТ (как и отключение генераторов) решает две задачи: обеспечение динамической устойчивости и переход к новому послеаварийному режиму с меньшей мощностью, выдаваемой станцией, в соответствии с новым пределом по статической устойчивости.
Обычно АУМТ применяется для регулирования паровых турбин, так как оно экономически более целесообразно по сравнению с отключением генераторов (ОГ) и последующим долгим процессом пуска блока. Кратковременное ограничение мощности гидротурбин находится в стадии разработки и экономически не всегда оправдано.
Эффект от АУМТ обычно выше, чем от ОГ, так как все генераторы остаются в работе, электрическая связь не ослабляется и, следовательно, требуется меньший объем управляющих воздействий.
Рассмотрим этот способ на примере простейшей ЭЭС (рис. 5.9), в которой в результате аварии (короткое замыкание К(n)) ослабляется связь с системой (отключается ЛЭП).

Рис. 5.9. Схема ЭЭС, в которой произошло КЗ: G – генератор;
К(n) – короткое замыкание; GS– система
Эффект от АУМТ проиллюстрируем с помощью метода площадей
(рис. 5. 10).
| Рис. 5.10. Соотношение энергий (площадок) ускорения и торможения при АУМТ: РТ1 –мощность турбины в нормальном режиме (I); РТ2–мощность турбины в послеаварийном режиме (II); III–аварийный режим | Рис. 5.11. Графики управляющего импульса и изменения мощности турбины: и– амплитуда импульса ; Тu–длительность импульса; Тзап–время запаздывания импульса; ŋаом–уровень восстановления нагрузки |
Для обеспечения быстрого управления мощностью в системах регулирования
турбины вводят электрогидравлический преобразователь (ЭГП), преобразующий электрический входной сигнал в форсированный гидравлический,
который обеспечивает кратковременную глубокую разгрузку турбины. В качестве входного сигнала в ЭГП обычно используют управляющий импульс (рис. 5.11). Его параметры зависят от предшествующего режима и тяжести аварии, поэтому этот способ управления мощностью называют импульсной разгрузкой турбины (ИРТ). Параметры импульса определяют процесс разгрузки турбины. Так и и Ти задают скорость и глубину разгрузки, а α, Тзап, ηаом – скорость, время запаздывания и уровень восстановления нагрузки.
При определении параметров управляющего импульса нужно учитывать возможные нарушения устойчивости во втором и последующих циклах качаний из-за достаточно высокой скорости восстановления нагрузки турбины. Это требует осторожности в применении этого способа в многомашинных системах, при большой местной нагрузке, в случае неполного восстановления мощности турбины. Таким образом, возникает сложная задача определения дозировки управляющих воздействий. Для обеспечения снижения мощности по условиям устойчивости послеаварийного режима (аварийное ограничение мощности – АОМ) следует уменьшить уставку механизма изменения частоты вращения турбины на соответствующее ηаом.
Дата добавления: 2022-05-27; просмотров: 197;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
