Эквивалентная динамическая система трансмиссии автомобиля
Основными параметрами механической модели являются моменты инерции масс относительно их осей вращения и жесткость упругих элементов. Динамические моменты инерции и жесткости находят экспериментальным путем или по чертежам деталей.
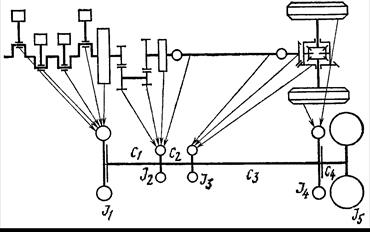
Действительная и приведенная схемы трансмиссии грузового автомобиля с колесной формулой 4  2 показана на рисунке,
2 показана на рисунке,
 где
где  – момент инерции вращающихся масс двигателя и ведущих деталей сцепления;
– момент инерции вращающихся масс двигателя и ведущих деталей сцепления;  – момент инерции ведомых деталей сцепления, деталей коробки передач, барабана трансмиссионного тормоза и части массы карданного вала;
– момент инерции ведомых деталей сцепления, деталей коробки передач, барабана трансмиссионного тормоза и части массы карданного вала;  – момент инерции второй части карданного вала и вращающихся частей ведущего моста;
– момент инерции второй части карданного вала и вращающихся частей ведущего моста;  – момент инерции ведущих колес;
– момент инерции ведущих колес;  – момент инерции приведенной к маховой поступательно движущей массы автомобиля,
– момент инерции приведенной к маховой поступательно движущей массы автомобиля,  –
–  – жесткости соответственно пружин демпфера сцепления и валов коробки передач, карданного вала, полуосей, шин ведущих колес.
– жесткости соответственно пружин демпфера сцепления и валов коробки передач, карданного вала, полуосей, шин ведущих колес.
Для упрощения математического описания, элементы эквивалентной механической колебательной системы приводят к одному валу (к одной угловой скорости). При таком приведении моментов инерции жесткостей системы используется принцип равенства кинематической и потенциальной энергий приводимой и приведенных систем.
Приведенные значения параметров:
 ; (2.2)
; (2.2)
 , (2.3)
, (2.3)
где  ,
,  – собственные значения параметра элемента,
– собственные значения параметра элемента,  – передаточное число от вала приведения до вала приводимого элемента.
– передаточное число от вала приведения до вала приводимого элемента.
Так, например, момент инерции колес и жесткость полуосей, приведенные к оси коленчатого вала:
 ; (2.4)
; (2.4)
 , (2.5)
, (2.5)
где  – передаточное число включенной передачи,
– передаточное число включенной передачи,  – передаточное число главной передачи,
– передаточное число главной передачи,  – число ведущих колес.
– число ведущих колес.
Поступательно движущаяся масса автомобиля может быть заменена приведенным моментом инерции  с помощью соотношения:
с помощью соотношения:
 , (2.6)
, (2.6)
где  – масса автомобиля,
– масса автомобиля,  – поступательная скорость движения автомобиля,
– поступательная скорость движения автомобиля,  – угловая скорость вращения коленчатого вала двигателя.
– угловая скорость вращения коленчатого вала двигателя.
При этом, поскольку
 , (2.7)
, (2.7)
то
 , (2.8)
, (2.8)
где  – радиус качения (кинематический радиус) колеса.
– радиус качения (кинематический радиус) колеса.
Дата добавления: 2022-05-27; просмотров: 140;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
