ГЕОМЕТРИЧНІ ВЛАСТИВОСТІ СТЕРЕОПАРИ АЕРОФОТОЗНІМКІВ
1. Стереоскопічний зір, характеристики стереоскопічного зору.
2. Штучний стереоефект. Умови отримання. Види стереоефектів.
3. Стереомоделі, види стереоскопічних моделей.
4. Стереопара. Система координат стереопари.
5. Паралакси. Різниця паралаксів.
Розрізняють такі види зору: монокулярний; бінокулярний; стереоскопічний.
 При монокулярному зорі (зір одним оком) навколишній простір сприймається площинно, хоча за деякими непрямими ознаками можливо говорити про наближеність або віддаленість предметів.
При монокулярному зорі (зір одним оком) навколишній простір сприймається площинно, хоча за деякими непрямими ознаками можливо говорити про наближеність або віддаленість предметів.
При бінокулярному зорі (зір двома очима) віддалені предмети також сприймаються площинно, але при розгляданні двома очима більш близьких предметів виникає стереоскопічний зір, при якому близькі предмети сприймаються об'ємно (просторово).
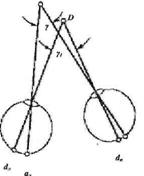
Якщо спостерігати за одною точкою А, то оптичні осі очей перетинаються в цій точці, утворюючи кут конвергенції (оптичні осі очей сходяться на предметі). Та якщо одночасно розглядати і другу точку Д то виникає інший кут Нерівність цих кутів викликає нерівність дуг на сітчатці ока. Різниця дуг називається фізіологічним паралаксом.
Найменша величина зміни паралактичного кута, що сприймається очима, називається гостротою стереоскопічного зору. Для можливості складання топографічних карт методом стереоскопічної зйомки вимірювання по аерофотознімку повинні виконуватися з дуже малими похибками, порядку 0,01 мм. Стереоскопічний зір не тільки забезпечує високу точність вимірювань, а й дозволяє отримувати просторову стереоскопічну модель місцевості.
Штучний стереоефект – це відчуття об’ємності (рельєфності) предмету, яке виникає при розгляданні площинного зображення. Для отримання стереоефекту необхідно:
· мати два фотозображення (аерофотознімка), одного предмету, що отримані з кінців базису фотографування,
· зображення повинне бути зорієнтоване по контурах;
· різномасштабність знімків не повинна перебільшувати 11%.
· кожне око повинно бачити зображення тільки одного із знімків.
Для цього застосовують різні способи розділення зорових осей очей: оптичний (лінзами, призмами або дзеркалами), анагліфічний (зелено-червоними світлофільтрами), поляроїдний (поляризацією світла у взаємно перпендикулярних площинах), растровий (диск, що швидко обертається.)
Об’ємний вигляд предмета при досягненні штучного стереоефекту залежить від того, як будуть розташовані знімки.
 При розташуванні знімків перекриттям один до одного всі горби будуть бачитися випуклими, а западини – вгнутими. Це прямий штучний стереоефект.
При розташуванні знімків перекриттям один до одного всі горби будуть бачитися випуклими, а западини – вгнутими. Це прямий штучний стереоефект.
 При розташуванні знімків перекриттям один від одного всі горби будуть бачитися вгнутими, а западини – випуклими. Це обернений штучний стереоефект.
При розташуванні знімків перекриттям один від одного всі горби будуть бачитися вгнутими, а западини – випуклими. Це обернений штучний стереоефект.
 При розташуванні знімків перекриттям один до одного, але повернутими на 90° штучного стереоефекту не буде. Це нульовий штучний стереоефект.
При розташуванні знімків перекриттям один до одного, але повернутими на 90° штучного стереоефекту не буде. Це нульовий штучний стереоефект.
Об’ємне зображення, отримане через штучний стереоефект, називається стерео моделлю. Залежно від того, якими проектуючи ми променями будується об’ємне зображення модель може бути реальною або позоровою. Позорова модель будується візирними проектуючи ми променями, наприклад під лінзово-дзеркальним стереоскопом.
Реальна модель будується проектуючи ми променями (стрижнями) на аналогових стереофотограмметричних приладах.
 Для отримання штучного стереоефекту потрібна пара знімків одного об’єкту (місцевості), з перекриттям більше 50% отриманих із різних кінців базису фотографування. Така пара називається стереоскопічною, або просто стереопарою. Визначення координат точок на стереопарі здійснюється у базисній системі або в системі лівого знімку. Система лівого знімку має початок координат у центрі лівого знімку ол, її осі Х і Y співпадають із відповідними осями лівого знімку, вісь Z - із головним променем лівого знімку. Система складається із шести елементів: трьох лінійних, які описують положення базису відносно лівого знімку bX, bY, bZ; та трьох кутових, які описують положення правого знімку відносно лівого αп , ωп , κп . Ці елементи називаються елементами взаємного орієнтування.
Для отримання штучного стереоефекту потрібна пара знімків одного об’єкту (місцевості), з перекриттям більше 50% отриманих із різних кінців базису фотографування. Така пара називається стереоскопічною, або просто стереопарою. Визначення координат точок на стереопарі здійснюється у базисній системі або в системі лівого знімку. Система лівого знімку має початок координат у центрі лівого знімку ол, її осі Х і Y співпадають із відповідними осями лівого знімку, вісь Z - із головним променем лівого знімку. Система складається із шести елементів: трьох лінійних, які описують положення базису відносно лівого знімку bX, bY, bZ; та трьох кутових, які описують положення правого знімку відносно лівого αп , ωп , κп . Ці елементи називаються елементами взаємного орієнтування.
 Розглянемо ідеальну стереопару, в якій αп = ωп = κп = 0 ; bY= bZ = 0 та bX = b. Аерофотознімки і базис фотографування В горизонтальні. Різниці абсцис відповідних точок аерофотознімків пари називається повздовжнім паралаксом р.
Розглянемо ідеальну стереопару, в якій αп = ωп = κп = 0 ; bY= bZ = 0 та bX = b. Аерофотознімки і базис фотографування В горизонтальні. Різниці абсцис відповідних точок аерофотознімків пари називається повздовжнім паралаксом р.
 |
де р – повздовжній паралакс точки А;
хл – координата точки А на лівому знімку;
хп – координата точки А на правому знімку;
В – базис фотографування;
Н – висота фотографування над точкою А;
f – фокусна відстань.
Аналіз формули дає зробити такі висновки:
1. На парі аерофотознімків ідеального випадку зйомки поздовжній паралакс р даної точки дорівнює базису фотографування В у масштабі цієї точки. При рівнинному рельєфі і 60% повздовжньому перекриттю аерофотознімків формату 18x18 см величина р ≈ 70 мм.
2. Точка місцевості з однаковими відмітками відповідає на стереопарі точці з однаковими поздовжніми паралаксами, тобто в цьому випадку p = const якщо Н=соnst.
3. Величина р залежить від рельєфу місцевості і чим вища точка місцевості, і відповідно менша висота Н, тим більша величина р.
4. Повздовжній паралакс р завжди додатній і ніколи не дорівнює нулю.
5. Паралакс збільшується при фотографуванні на довгофокусні камери та при невеликих висотах фотографування.

 Якщо відняти паралакси двох точок, які розташовані на різних висотах, але знаходяться на парі аерофотознімків, така величина називається різницею паралаксів:
Якщо відняти паралакси двох точок, які розташовані на різних висотах, але знаходяться на парі аерофотознімків, така величина називається різницею паралаксів:
На основі різниці паралаксів можна визначити перевищення між цими точками за формулою Брока:
 де Δр – різниця повздовжніх паралаксів точок А і В;
де Δр – різниця повздовжніх паралаксів точок А і В;
b – базис фотографування в масштабі знімання;
Н – висота фотографування над точкою А;
h – перевищення між точками А і В (h = АA – АB).
Аналіз формули дає:
- Перевищення тим більше, чим більше різниця паралаксів і висота фотографування.
- Якщо різниця паралаксів дорівнює нулю, перевищення дорівнює нулю.
-
 Якщо різниця паралаксів від’ємна, перевищення теж від’ємне.
Якщо різниця паралаксів від’ємна, перевищення теж від’ємне.
Поперечні паралакси – різниці ординат одноіменних точок на стереопарі, викликані елементами взаємного орієнтування стереопари. Якщо правий знімок нахилений або розвернутий відносно лівого, то ординати одної точки А на знімках стереопари будуть відрізнятися.


Поперечний паралакс може бути додатнім і від’ємним, може дорівнювати нулю і залежить від величини елементів взаємного орієнтування bX, bY, bZ, αп , ωп , κп.
ЛЕКЦІЯ 7
Дата добавления: 2022-05-27; просмотров: 147;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
