Плоские волновые трубки с произвольными окончаниями (завершениями, терминацией)
Затем обратим наше внимание на трубки конечной длины, возбуждаемые только плоскими волнами, но имеющие произвольные окончания (завершения). Хорошей отправной точкой является трубка с длиной L, возбуждаемая поршнем, как в нашем исходном случае, но которая заканчивается жестким барьером на его приемном конце. Эта ситуация изображена в верхней половине рисунка 16-18.
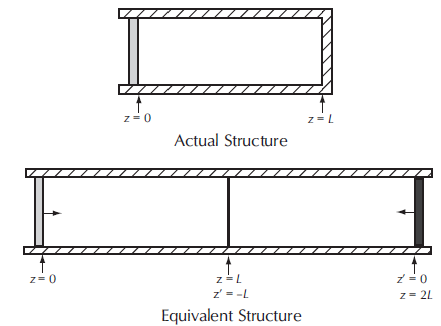
Рисунок 16-18. Труба, оканчивающаяся жестким барьером.
По мере того, как поршень начинает двигаться в реальной структуре, плоская волна распространяется в положительном направлении z, достигая жесткого барьера по истечении времени L / c. Поскольку барьер является жестким, в барьере в любое время не может быть смещения частиц или скорости. Волна отражается, а затем движется в отрицательном направлении z назад к источнику, где она снова отражается, только теперь движущимся поршнем. Этот процесс продолжает повторяться снова и снова, и после того, как многочисленные транзиты вперед и назад приходят в устойчивое состояние с граничными условиями на поршне, согласованными с движением поршня, и теми условиями, что находятся на барьере, соответствующими нулевому смещению частиц, а также нулевой скорости. В области 0 ≤ z ≤ L мы, в конечном счете, имеем суперпозицию двух волн, движущихся в противоположных направлениях.
Волновое уравнение линейно, поэтому принцип суперпозиции применим при достижении решения для конкретного случая. Кроме того, решение волнового уравнения, которое удовлетворяет заданным граничным условиям, уникально, поэтому мы можем рассматривать проблему, анализируя эквивалентную структуру в нижней половине рис. 16-18, которая основана на методе изображений. В этом методе левый (светлый) поршень является фактическим источником, а правый (темный цвет) поршень является источником изображения, который расположен как можно правее от барьера, так как фактический источник расположен слева от барьера. Когда левый поршень смещается вправо, правый поршень смещается аналогично левому. В эквивалентной структуре нет барьера при z = L, хотя его положение указано на рисунке. В активном интервале 0 ≤ z ≤ L, в котором будет применяться наше решение, мы суммируем отдельные волны, генерируемые реальным источником и источником изображения (мнимым). Когда левый поршень перемещается вправо, воздух перед ним сжимается, поэтому он создает волну давления, заданную pl = pmcos (ωt - kz), где pm - амплитуда давления, k - постоянная распространения вдоль оси z. Здесь мы опускаем индекс «постоянной» распространения, так как мы имеем дело только с плоской волной. Аналогично, когда поршень изображения перемещается влево, он создает волну давления pr = pmcos (ωt + kz '). Однако ситуация в отношении скорости частиц существенно различается. Волна скорости частицы, создаваемая левым поршнем, равна ul = umcos (ωt - kz), однако, когда правый поршень перемещается влево, то частицы воздуха движутся в отрицательном направлении, так что ur = -umcos (ωt + kz '). Кроме того, z '= z - 2L, поэтому в активном интервале 0 ≤ z ≤ L полное акустическое давление задается формулой:

а полная скорость частиц определяется формулой:

Эти составные выражения описывают стоячие волны. Наши бегущие волны в противоположных направлениях объединились, чтобы сформировать стоячие волны, как акустического давления, так и скорости частиц. Теперь на барьере, где z = L, акустическое давление p = 2pmcos (ωt - kL). Это означает, что амплитуда давления удваивается, что означает, что при жестком барьере нормально (перпендикулярно) падающая волна давления отражается в фазе. С другой стороны, скорость частицы (u) на барьере, определяемая u = umcos (ωt - kL) - umcos (ωt-kL), всегда одинаково равна нулю, что указывает на то, что на жестком барьере волна с нормально (перпендикулярно) падающей скоростью частицы отражается с изменением полярности, или фазовым сдвигом на π радиан. Важный вопрос: «Каковы условия в месте происхождения, где находится левый поршень?» Установив z = 0 в общих уравнениях, находим, что полное акустическое давление в начале координат теперь равно p = pmcos (ωt) + pmcos (ωt - 2kL).
Теперь важно помнить, что в этой точке все углы выражены в радианах. Предположим, что длина L точно равна λ / 4 при рабочей частоте поршня. Помня, что k = (2π) / λ, то 2kL = 2 (2π / λ) (λ / 4) = π. Когда это так, то два члена давления различаются по фазе на π, и их сумма равна нулю во все времена t. Это резонансное условие. Акустическое давление, равное нулю, означает, что движение поршня полностью беспрепятственно. Это будет справедливо и тогда, когда L - любой нечетный интеграл, кратный λ / 4. Этот идеал никогда точно не достигается на практике, потому что на стенах трубки всегда есть очень небольшие вязкие потери, а амплитуда движения правого поршня всегда немного меньше, чем у левого поршня.
Условия, которые существуют на возбуждающем поршне для трубки произвольной длины L, заключенной в жесткий барьер, обычно изучаются с помощью механического импеданса, предоставляемого поршню в результате его взаимодействия с воздухом в начале координат. Этот механический импеданс представляет собой отношение комплексной силы, действующей на воздух на поверхности поршня, к комплексной скорости частиц воздуха на поверхности поршня. Комплексная сила - это акустическое давление в начале координат, выраженное в виде сложной экспоненты или фазора, умноженное на площадь поперечного сечения трубки. Комплексная скорость частиц представляет собой комплексное экспоненциальное состояние скорости частицы, также в начале координат. Сложные экспоненты и фазоры подробно описаны в главе 6. Затем механический импеданс рассчитывается из:

Это можно упростить путем факторизации и отмены общих терминов, как в числителе, так и в знаменателе, чтобы получить,
 (16 – 54)
(16 – 54)
Вывод заключается в том, что механический импеданс, предоставленный поршню, является отрицательным реактивным сопротивлением для положительных значений котангенса, как указано в -j в финальном утверждении. Если бы не было вязких потерь, то этот импеданс был бы равен нулю в резонансном состоянии, где L равно нечетным интегральным кратным λ / 4 и был бы бесконечным для анти резонансного условия, где L равно целочисленным кратным λ ⁄ 2. Тот факт, что механический импеданс является чисто реактивным, означает, что после достижения условий устойчивого состояния средняя мощность, подаваемая поршнем, становится нулевой в идеальном случае. Это также означает, что акустическое давление и скорость частиц в стоячей волне различаются по фазе на π / 2 радиан или 90°.
Далее мы рассмотрим общую технику, применимую к плоским волновым трубам, имеющим произвольные окончания, в том числе жесткие барьеры, трубу с открытым контуром и любой другой механический импеданс. Наконец, мы рассмотрим взаимодействие между небольшим громкоговорителем, используемым для возбуждения трубки и неправильно завершенной плоской волновой трубкой.
Напомним, что механический импеданс определяется как отношение комплексной механической силы, приложенной к объекту, деленное на полученную комплексную механическую скорость объекта:

Кроме того, в любой точке звукового поля отношение комплексного акустического давления к полученной скорости частиц называется удельным акустическим импедансом в рассматриваемой точке.

Теперь рассмотрим плоскую волновую трубку, снабженную поршнем при z = 0 и механическим импедансом ZL в пространственной точке z = L. Пусть смещение поршня в любое время описывается фазором:

где, ξm - амплитуда смещения поршня, ω - угловая частота колебаний поршня.
Помните, что фактическое движение поршня дается только действительной частью этого фазора, а именно ξ = ξmcos (ωt). В общем случае ZL должным образом не заканчивает трубку, поэтому мы должны учитывать как первичную волну, так и отраженную волну. В этом случае фазовое описание двух волн становится:

В нуле, где z = 0, граничное условие выполняется, если это последнее выражение соответствует заданному движению поршня, из которого следует, что ξm = A + B. Для определения A и B требуется другое независимое уравнение. Это уравнение получается, если признать, что при z = L отношение акустической силы к скорости частицы в этой точке должно быть равно механическому импедансу в этой точке. Затем необходимо написать общие выражения для акустического давления и скорости частиц, которые справедливы в любой точке трубы и особенно при z = L.
где, s (z, t) - конденсация, ρ0 - ненарушенная плотность воздуха.
Теперь сила при z = L - это акустическое давление в этой точке, умноженное на площадь поперечного сечения трубки S. Разделение силы на скорость частицы при z = L приводит к второму уравнению, включающему A и B.

Два независимых уравнения для A и B сейчас решается одновременно, чтобы получить:
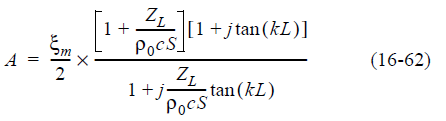
Зная значения для A и B, теперь можно оценить ξ (z, t), p (z, t) и u (z, t) в любой точке трубы. В частности, на входе трубки, где z равно нулю, мы можем определить механическую нагрузку или полное сопротивление, которое трубка представляет для движения поршня. Этот термин называется Z0 и рассчитывается как:
Этот последний результат является довольно общим и относится не только к трубам, но и к другим формам, а длина рабочей волны велика по сравнению с наибольшим размером, связанным с поперечным сечением структуры. Наш предыдущий результат для трубки, завершенной с жестким барьером, который был вычислен ранее, можно легко получить из общего выражения для Z0, разделив как числитель, так и знаменатель на ZL, а затем, позволив ZL приблизиться к бесконечности. Еще одно замечание в отношении этого общего случая, заслуживающее внимания, - это поведение, которое происходит, когда трубка приводится на частоте или частотах, так что длина трубки является интегральным числом полуволн. Когда это верно, касательные члены в Z0 точно равны нулю, а Z0 становится тождественно равным ZL, а механический импеданс трубки, противоположный движению поршня, такой же, как и механический импеданс, который заканчивается трубой. Трубка с половинной длиной волны действует как идеальный трансформатор с коэффициентом поворота 1:1.
Предположим, что вместо того, чтобы оканчиваться жестким барьером или колпачком, трубка просто резко кончается при z = L, будучи окруженной, очень большой, идеально бесконечной плоской перегородкой. Каков конечный механический импеданс в этом случае? Ответ - не нуль, потому что воздушные частицы на конце трубки должны прижиматься к наружному воздуху, содержащемуся под телесным углом 2π, когда они страдают от смещения передней бегущей волной, находящейся внутри трубки. Фактически, воздушные частицы на конце трубки испытывают те же самые импедансы, что и у передней поверхности поршня, который излучает в полупространство или телесный угол 2π.
В качестве альтернативы, усеченный конец трубки может просто заканчиваться в открытом пространстве, и в этом случае излучение почти не ограничено или имеет телесный угол почти 4π. В последнем случае акустическое давление примерно в два раза меньше, чем в первом случае. Поскольку сила прямо пропорциональна давлению, то импеданс, испытываемый усеченной трубкой, за исключением перегородки, также примерно в два раза меньше, чем у бесконечного дефлектора. В любом случае конечный импеданс рассчитывается посредством использования функции, которая называется функцией импеданса поршня. Функция импеданса поршня имеет реальные и мнимые части, которые записываются как R (2ka) + jX (2ka), где k = (2π) / λ, a - радиус поршня или, в данном случае, внутренний радиус трубки. Действительная часть функции импеданса поршня может быть выражена через функцию Бесселя первого порядка первого рода, с функцией Бесселя мы столкнулись ранее в этой главе, а мнимая часть может быть выражена через функцию Струве первого порядка.
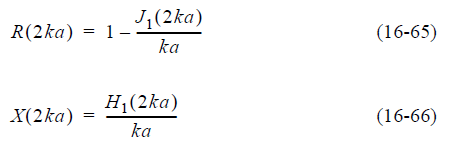
Эти функции изображены на рис. 16-19.
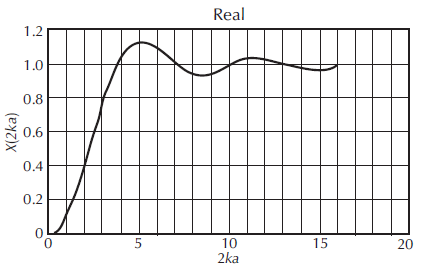
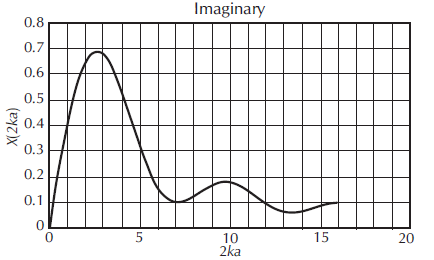
Рисунок 16-19. Реальные и мнимые части функции импеданса поршня.
Конечный импеданс усеченной трубки с перегородкой, выраженной через функцию импеданса поршня, составляет ZL = ρ0cS [R (2ka) + jX (2ka)], в то время как усеченная трубка без перегородки составляет примерно половину этой величины. Очень важно отметить, что все вышесказанное не учитывает потери энергии, возникающие в воздухе или на внутренних поверхностях трубки. Воздух имеет вязкий модуль сдвига, который является коэффициентом потерь на поверхностях труб и вязким модулем упругости, который является коэффициентом потерь во всем замкнутом объеме. Выработка тепла и проводимость в корпусе газа и на стенках труб еще более важны в отношении потерь энергии. Стремление к этим темам привело бы нас гораздо дальше к физике жидкостей, чем мы готовы сюда пойти. Несмотря на то, что потери для коротких трубок разумного диаметра малы, их включение значительно усложняет математику описания процесса. Потери можно было бы учитывать в наших уравнениях, позволяя константе распространения k быть с комплексной формой β - jα. Замена k в наших уравнениях этой комплексной формой заставляет смещение частиц в нашем описании стать:

Помимо необходимости повторить анализ с использованием этой исходной точки, проблема осложняется еще и тем, что и α, и β сложным образом зависят от частоты. Частотная зависимость β особенно затруднительна, поскольку фазовая скорость ω / β больше не будет зависеть от частоты. Проблема может быть решена точно, но математика еще более утомительна. Мы рассмотрим наши результаты, как первое, так и полезное приближение к более точным.
Теперь мы будем использовать наши приблизительные результаты для расчета наименьших резонансных частот двухдиапазонного громкоговорителя, лицевая сторона которого прикреплена к короткой трубке с внутренним диаметром 2 дюйма, а дальний конец трубки заканчивается жесткой крышкой. Задняя часть громкоговорителя закрыта маленькой коробкой. Воздух, запертый в коробке, и подвеска громкоговорителя вместе действуют как пружина с общей жесткостью K. Подвеска также обеспечивает механическое сопротивление Rm. Движущаяся масса конуса громкоговорителя M, а сам динамик имеет общий механический импеданс Zls с Z1s = Rm + J(ωM – K ⁄ ω). Как мы уже ранее узнали, закрытая трубка нагружает переднюю грань громкоговорителя с механическим сопротивлением, равным -jρ0cScot (kL). Общий механический импеданс, предоставленный воздействию, которое управляет громкоговорителем, является суммой этих двух импедансов с Zm = Rm + j (ωM - K / ω - ρ0cScot (kL)). Управляемый громкоговоритель будет находиться в резонансе для тех частот, где полное реактивное сопротивление в выражении механического импеданса становится равным нулю или где ωM - K / ω = ρ0cScot (kL). В этом последнем равенстве заменим k на ω / c, а затем заменим ω на 2πf так, чтобы обе стороны могли быть построены по сравнению с f. Точки пересечения двух результирующих кривых идентифицируют резонансные частоты. Это было сделано с использованием параметров, типичных для двухдюймового громкоговорителя, установленного на двухдюймовой трубке длиной в один метр. Результаты представлены на рисунке 16-20. Для сравнения, тот же расчет был выполнен с учетом потерь воздуха в трубке. Эти результаты представлены на рис. 16-21.
Механический импеданс на входе в закрытую трубку, когда потери воздуха в трубе малы,

Реальная часть этого выражения является механическим сопротивлением и наряду с механическим сопротивлением громкоговорителя расширяет форму резонанса, но не влияет на его расположение. Установка α, равная нулю, сводит выражение импеданса к тому, которое было получено без учета потери воздуха. Есть резонансы за пределами отображаемого частотного диапазона, но высота пунктирной кривой в конечном итоге превосходит высоту сплошного тела, и дальнейшие пересечения не будут превышать такую точку.
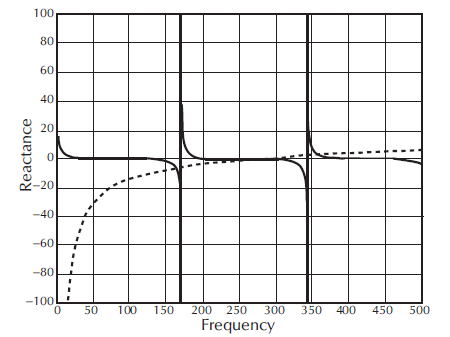
Рисунок 16-20. Твердая кривая представляет собой график функции котангенциального реактивного сопротивления с вертикальными линиями, указывающими точки разрыва этой функции. Пунктиром является кривая реактивного сопротивления громкоговорителя. Дисконтируя пересечения на разрывных скачках, в изображенном диапазоне частот самый низкий резонанс составляет 165 Гц, средний резонанс при 281 Гц близок к естественному резонансу громкоговорителя без фронтальной нагрузки 290 Гц, а верхний резонанс составляет 362 Гц.
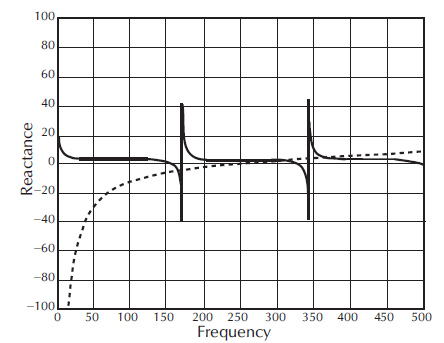
Рисунок 16-21. Твердая кривая представляет собой реактивное сопротивление, создаваемое трубкой, включая влияние потерь воздуха. Пунктиром является кривая реактивного сопротивления громкоговорителя. Указанные здесь резонансные частоты по существу те же, что и на рис. 16-20.
Импедансная труба
Анализы, рассмотренные в предыдущем разделе, составляют основу устройства, используемого при определении механических импедансных свойств материалов, которые часто используются в качестве акустических поглотителей энергии. Структура такого устройства показана на рис. 16-22.
Импедансная труба состоит из полой трубки с жесткой стеной, которая снабжена ведомым поршнем, правая сторона которой имеет положение покоя при z = 0. Начиная с z = 0, оставшаяся часть объема трубки снабжена интересующим образцом, через который проходит тонкий калиброванный стержень, целью которого является управление положением миниатюрного чувствительного к давлению микрофона. В примере, который представлен здесь, поршень испытывает колебательное движение с амплитудой 10-6 м при частоте 1000 Гц. В этом примере статическая плотность воздуха, ρ0, составляет 1,2 кг • м-3, а скорость звука c - 344 м • сек-1. Длина волны плоской волны, генерируемой движением поршня, составляет 0,344 м, а расстояние L установлено на этом значении.
Плоская волна, генерируемая поршнем, распространяется к образцу, где часть энергии волны отражается назад к поршню, а остальная часть передается в образец, где она впоследствии поглощается, если образец является однородным и имеет достаточную длину. В условиях устойчивого состояния заполненное воздухом пространство в интервале 0 ≤ z ≤ L содержит плоскую волну, движущуюся в направлении возрастания z, и волну с более низкой амплитудой и сдвинутой фазой, движущуюся в направлении уменьшения z. Наложение этих противоположно направленных бегущих волн создает в этом пространстве стационарный или стоячий волновой рисунок, пример которого может быть экспериментально определен путем позиционирования подвижного миниатюрного микрофона при последовательных значениях координаты z в заполненном воздухом пространстве и измерением акустического давления в каждой позиции.
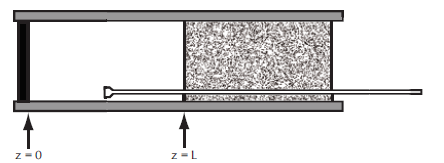
Рисунок 16-22. Иллюстрация представляет собой пример базовой конструкции импедансной трубки.
Результаты таких наблюдений, полученные с конкретным образцом, показаны на рисунке 16-23.
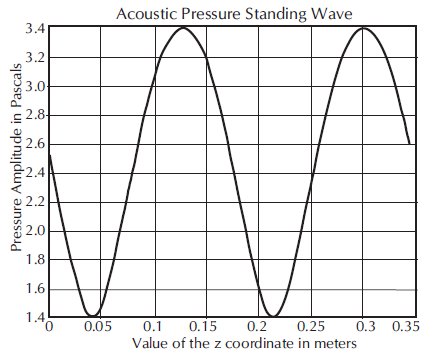
Рисунок 16-23. Давление стоячей волны, создаваемой в импедансной трубке.
В схеме стоячей волны на рис. 16-23 показаны как минимумы, так и максимумы. Минимумы называются узлами, а максимумы - антиузлами. Знание местоположения первого узла и связанного с ним давления наряду с давлением на антиузле является достаточной экспериментальной информацией, позволяющей нам изучить механический импеданс испытываемого образца, как мы это продемонстрируем далее. Первый узел расположен в точке z = 0,043 м и составляет ровно одну восьмую длины волны от начала координат. Акустическое давление на этом узле имеет значение 1,40 Паскалей. Первый антиузел имеет акустическое давление 3,38 Паскаля. Отношение стоячей волны или SWR является частным из этих двух значений и составляет 2,414.
В нашем первоначальном обсуждении плоской волновой трубки с поршневым движением с произвольным окончанием были найдены следующие два уравнения фазора, описывающие перемещение частиц и акустическое давление, присутствующие в трубе, а также общее выражение для конечного полного сопротивления при z = L.
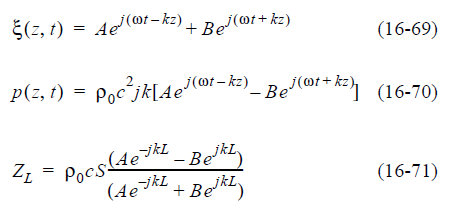
Тождества для этих трех уравнений в более удобной форме для настоящей цели появляются со следующей структурой.
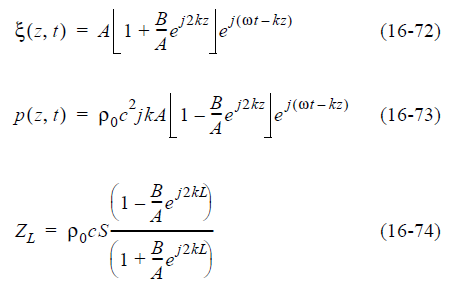
Напомним, что A и B являются, в общем, сложными амплитудными факторами и что величина B меньше, чем величина A. Затем мы будем представлять их коэффициент как Fe jθ, где F меньше единицы и представляет собой величину B, деленную на величину A, а угол theta - угол B минус угол A. Используя эту форму частного, уравнение для акустического давления принимает следующий вид.

Амплитуда давления будет иметь свой первый минимум, когда первый член в скобке получит минимальное значение. Этот минимум равен 1 - F. Это происходит, когда θ + 2kz сначала становится равным нулю, так как теорема Эйлера утверждает, что e j(0) = cos (0) + j sin (0) = 1. Напомним, что k = (2π / λ) и что первый узел кривой давления имеет место при z = λ / 8, поэтому:

На узле давления значение экспоненциального члена, умножающего F, равно одному, так что минимальное давление пропорционально 1 - F. Точно так же давление на антиузле происходит, когда значение экспоненциального члена, умножающего F, минус единица, а максимальное давление пропорционально 1 + F. Отношение стоячей волны или SWR экспериментально оказалось равным 2,414. Поэтому мы можем написать:

Наконец, мы теперь можем определить значение конечного механического импеданса ZL. Мы намеренно выбрали длину L как длину волны на рабочей частоте. Этот выбор делает угол в экспоненциальных множителях уравнения для ZL равным либо + 4π, либо -4π, для которого косинус угла равен единице, а синус угла в любом случае равен нулю, поэтому ZL упрощается до:
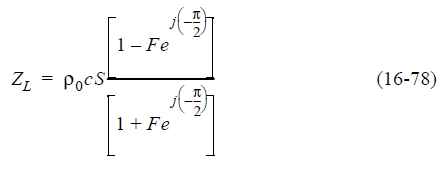
При подстановке величины F = 0,4142 в приведенном выше уравнении мы приходим к результату:

S - это просто площадь поперечного сечения импедансной трубки, и если мы разделим механический импеданс конечной среды на S, то в этом случае мы оставим конкретный акустический импеданс среды, ρ0ce j (π / 4).
Волна звукового давления, распространяющаяся в среде со сложным удельным акустическим импедансом, как в приведенном выше примере, теряет энергию, как от пройденного расстояния, так и от частоты, и имеет фазовую скорость, зависящую от частоты.
Дата добавления: 2022-05-27; просмотров: 95;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
