Структура с подчиненным регулированием координат
Структура с суммирующим усилителем
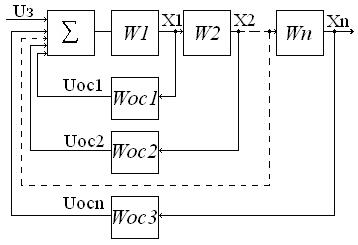
Рис 2.1. Схема управления с суммирующим усилителем
В таких ЭП все обратные связи (ОС) подаются на вход суммирующего усилителя, сюда же подается и задающий сигнал. В результате сигнал управления ЭП формируется как результат действующего сигнала задания и сигналов ОС по различным координатам.
В этой структуре используется ОС по различным координатам ЭП, при этом ОС могут быть как положительные (ПОС), так и отрицательные (ООС), жесткие и гибкие, линейные и нелинейные.
Недостатком этой схемы является невозможность непосредственно управлять каждой координатой в отдельности. Здесь возможна лишь компромиссная настройка координат.
Структура с логическим переключающим устройством
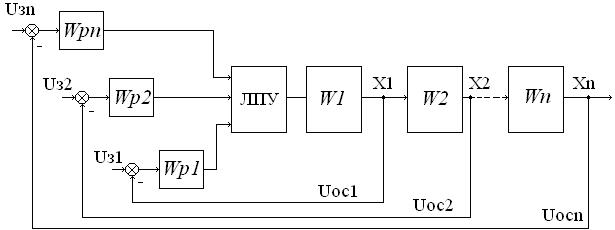
Рис 2.2. Схема управления с логическим переключающим устройством
В этой структуре для каждой координаты ЭП используется свой регулятор, его подключение к объекту в нужный момент осуществляется с помощью ЛПУ. Здесь обеспечивается независимое управление координат ЭП, что облегчает настройку регуляторов и повышает точность их работы. В отечественной практике такие системы не применяются из-за сложности ЛПУ.
Структура с подчиненным регулированием координат

Рис 2.3. Схема управления с подчиненным регулированием координат
Эта структура получила наибольшее распространение. Число регулируемых координат равняется числу контуров регулирования, при этом контуры как бы вложены один в другой и внешние регуляторы являются задающими для внутренних (регулирование внутренней координаты подчинено внешней). Такая структура позволяет легко рассчитать параметры настройки любого регулятора и обеспечить высокое качество управления.
Мы рассмотрим две структуры управления ЭП: с суммирующим усилителем и с подчиненным регулированием координат на примере регулируемого привода постоянного тока.
Системы с суммирующим усилителем
В системах с суммирующим усилителем стабилизация скорости ЭП или момента обеспечивается за счет использования непрерывных и задержанных ОС. В приводах постоянного тока применяются три основные жесткие ОС:
1) по скорости;
2) по напряжению питания ЭД;
3) по току ЭД.
На практике чаще встречаются системы стабилизации скорости. В них используют ООС по скорости, ООС по напряжению и ПОС по току. В системах стабилизации момента, наоборот, используют ПОС по скорости и напряжению и ООС по моменту [4, 9].
Изобразим функциональную схему ЭП с суммирующим усилителем и тремя основными ОС (рис 2.4).
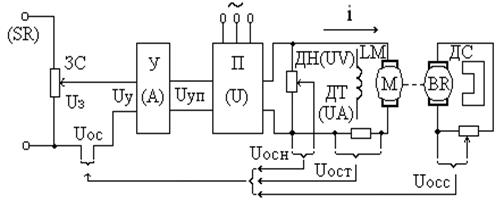
Рис.2.4. Функциональная схема электропривода с суммирующим усилителем
На схеме (рис 2.4):
ЗС (SR) – задатчик скорости
У (A) – суммирующий усилитель
П (U) – преобразователь
М – двигатель
ДС (BR) – датчик скорости
ДН (UV) – датчик напряжения
ДТ (UA) – датчик тока.
Работа ЭП в установившихся и переходных режимах при инерционном преобразователе и постоянном магнитном потоке ЭД описывается системой уравнений (2.1):
 (2.1)
(2.1)
Здесь  - напряжения задания, ОС, управления и управления преобразователем;
- напряжения задания, ОС, управления и управления преобразователем;
 - коэффициенты усиления (промежуточного) суммирующего усилителя и преобразователя;
- коэффициенты усиления (промежуточного) суммирующего усилителя и преобразователя;
 - ЭДС преобразователя;
- ЭДС преобразователя;
 - угловая скорость ЭД;
- угловая скорость ЭД;
 - момент и ток ЭД и момент и ток статической нагрузки;
- момент и ток ЭД и момент и ток статической нагрузки;
 - коэффициент передачи ЭД по скорости;
- коэффициент передачи ЭД по скорости;
 - коэффициент ЭД по моменту;
- коэффициент ЭД по моменту;
 - постоянная времени преобразователя;
- постоянная времени преобразователя;
 - суммарные сопротивление и индуктивность силовой якорной цепи УП-Д, включающие
- суммарные сопротивление и индуктивность силовой якорной цепи УП-Д, включающие  и сопротивления и индуктивности других элементов якорной цепи;
и сопротивления и индуктивности других элементов якорной цепи;
 - момент инерции ЭП с учетом момента инерции ЭД и приведенного к валу ЭД момента инерции механизма
- момент инерции ЭП с учетом момента инерции ЭД и приведенного к валу ЭД момента инерции механизма  ;
;
 - коэффициенты передачи ОС.
- коэффициенты передачи ОС.
Датчики ОС обычно полагают безынерционными. В качестве датчиков ОС в системах ЭП используют тахогенераторы, делители напряжения, шунты или трансформаторы тока.
Решая систему уравнений, для замкнутой системы ЭП, мы получим дифференциальное уравнение, описывающее всю систему в целом. В общем виде его можно представить так:

Обычно это уравнение записывают при одновременном действии всех ОС. В справочниках по автоматизированному ЭП приводятся коэффициенты этого уравнения для различных их сочетаний.
Из общего уравнения легко получить частное, оставив только коэффициенты, действующих в данном приводе ОС.
При расчете динамики используют структурную схему привода, которую можно составить по функциональной схеме при действии всех основных ОС (рис.2.5):
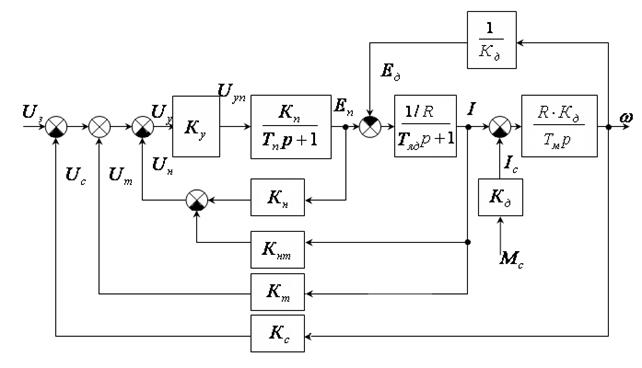
Рис.2.5.Структурная схема электропривода
На схеме показаны:
ОС по напряжению на двигателе, полученная как сочетание ОС по ЭДС преобразователя и ОС, учитывающей падение напряжения на внутреннем сопротивлении преобразователя;
ОС по току якоря;
ОС по скорости.
 - передаточный коэффициент ОС по напряжению, токовая составляющая;
- передаточный коэффициент ОС по напряжению, токовая составляющая;
 - сопротивление силовой цепи преобразователя.
- сопротивление силовой цепи преобразователя.
Дифференциальное уравнение, описывающее систему ЭП, чаще всего находят из анализа структурной схемы, определив ПФ всей системы. Дифференциальное уравнение и ПФ системы при действии любой отдельно взятой ОС можно получить, если оставить на структурной схеме только эту ОС.
На практике для определения ПФ системы используют свернутую структурную схему (рис.2.6), в которой возмущающее воздействие перенесено на вход системы, а токовая ОС на выход.
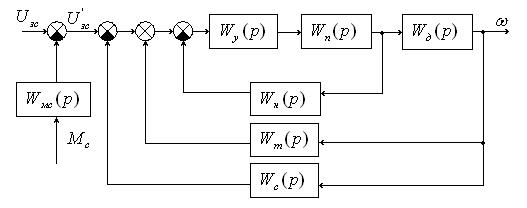
Рис.2.6.Свернутая структурная схема электропривода
На схеме (рис. 2.6) общее воздействие на ЭП:
 ,
,
где  - управляющее воздействие;
- управляющее воздействие;
 - возмущающее воздействие;
- возмущающее воздействие;
 - передаточная функция звена, приводящего возмущающее воздействие к входу системы.
- передаточная функция звена, приводящего возмущающее воздействие к входу системы.
при действии трех основных ОС можно определить так:
 ,
,
где  ;
;
- постоянная времени преобразователя;
 - постоянная времени якорной цепи;
- постоянная времени якорной цепи;
 - постоянная времени якоря ЭД.
- постоянная времени якоря ЭД.
В этой схеме уравнениями (2.1) с учетом переноса точек воздействия определяются ПФ:
 - усилителя;
- усилителя;
 - преобразователя;
- преобразователя;
 - ЭД;
- ЭД;
 - ОС по напряжению;
- ОС по напряжению;
 - ОС по току;
- ОС по току;
 - ОС по скорости.
- ОС по скорости.
Общую передаточную функцию системы записывают по отношению к суммарному воздействию системы:
 В этом выражении:
В этом выражении:
 .
.
Передаточная функция системы с любой ОС может быть записана в виде:
 . (2.4)
. (2.4)
Передаточные функции системы с суммирующим усилителем для случая действия различных ОС приводятся в справочниках по электроприводу.
Статический расчет электропривода
Статический расчет сводится к определению передаточных коэффициентов, выбору ОС и построению электромеханических или механических характеристик электропривода.
Статическая настройка ЭП осуществляется в установившихся режимах, исходя из заданного статизма и требований нагрузки. Основная задача – это стабилизация скорости ЭД. Ее точность оценивается обычно по механической или электромеханической характеристикам, которые строятся при постоянном напряжении в сети и постоянной температуре окружающей среды. Колебания температуры и напряжения (если они есть) могут компенсироваться изменением коэффициента усиления усилителя. Уравнение электромеханической характеристики для случая действия трех основных ОС выглядит так:
 (2.5)
(2.5)
Уровень стабилизации скорости в замкнутой системе определяется через ошибку регулирования в разомкнутой системе:
 , (2.6)
, (2.6)
где  - ошибка регулирования в разомкнутой системе; (2.7)
- ошибка регулирования в разомкнутой системе; (2.7)
 - суммарное сопротивление якорной цепи.
- суммарное сопротивление якорной цепи.
Ошибка регулирования в замкнутой системе ЭП зависит от значений коэффициентов ОС и коэффициентов усиления преобразователя и усилителя. При этом возможности ОС различны. В большинстве случаев коэффициенты ОС определяются датчиками, а коэффициент усиления преобразователя – выбранным типом преобразователя. Значение ошибки таким образом будет определяться коэффициентом усиления суммирующего усилителя. При этом часто возникает необходимость либо в нахождении суммарного коэффициента усиления системы, либо коэффициента усиления суммирующего усилителя при заданной ошибке регулирования –  . Кроме того, используется понятие ошибки на естественной характеристике двигателя:
. Кроме того, используется понятие ошибки на естественной характеристике двигателя:
 . (2.8)
. (2.8)
,  ,
,  определяют значения коэффициентов ОС и коэффициентов усиления преобразователя и усилителя в системе с:
определяют значения коэффициентов ОС и коэффициентов усиления преобразователя и усилителя в системе с:
1) ООС по скорости:  ; (2.9)
; (2.9)
2) ООС по напряжению:  ; (2.10)
; (2.10)
3) ПОС по току:  . (2.11)
. (2.11)
На практике при расчете системы широко используется понятие статизма, причем статизм определяется по отношению к скорости идеального ХХ и может быть выражен в абсолютных единицах или процентах:
 . (2.12)
. (2.12)
С уменьшением скорости идеального ХХ при той же ошибке статизм растет.
В расчетах используют:
– диапазон регулирования скорости
 ,
,
– понятие статизма разомкнутой системы
 ,
,
– понятие статизма естественной характеристики ЭД
 ,
,
– понятие статизма замкнутой системы (он обычно равен заданному)
 .
.
Исходя из определения статизма можно записать выражения 2.9-2.11:
1) для ООС по скорости:  ; (2.13)
; (2.13)
2) для ООС по напряжению:  ; (2.14)
; (2.14)
3) для ПОС по току:  . (2.15)
. (2.15)
Регулирование скорости в заданном диапазоне осуществляется изменением задающего сигнала. Значение задающего напряжения также зависит от коэффициентов ОС и коэффициентов усиления преобразователя и усилителя. Определяют значение  из уравнения электромеханической характеристики при идеальном ХХ двигателя:
из уравнения электромеханической характеристики при идеальном ХХ двигателя:
 . (2.16)
. (2.16)
Комбинированные обратные связи
Распространение получили комбинации ООС по скорости или напряжению и ПОС по току. При этом ОС по напряжению или скорости принимается сильной, а связь по току - слабой. На верхних скоростях диапазона регулирования, когда статизм удовлетворяет заданию, действие ОС по току слабее, а на нижних скоростях, когда напряжение на якоре снижено, основную роль играет токовая ОС. Нелинейность характеристик усилителя и преобразователя незначительно сказывается при малых напряжениях.
Комбинация ОС по току и напряжению получила распространение в виде ОС по ЭДС ЭД (рис. 2.7).
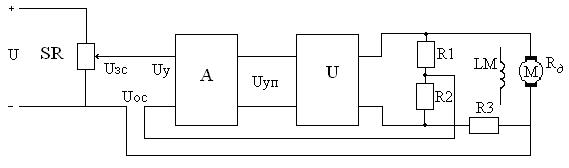
Рис.2.7. Функциональная схема электропривода с обратной связью по ЭДС
Датчиком противо-ЭДС в этой схеме является уравновешенный тахометрический мост:  – условие равновесия моста.
– условие равновесия моста.
Напряжение ОС можно определить:
 .
.
Выражение электромеханической характеристики можно записать:
 . (2.17)
. (2.17)
Связь по ЭДС Д обеспечивает стабилизацию скорости с точностью ниже, чем связь по скорости с тахогенератором. Обусловлено это тем, что не учитывается реакция якоря и падение напряжения в щеточном контакте. Используется такая ОС в тех случаях, когда не предъявляется высоких требований к регулированию частоты вращения или нет возможности установить тахогенератор.
Ограничение тока и момента электропривода.Задающее напряжение в системе управления часто подается скачком, в этом случае возникает форсировка сигнала управления, то есть сигнал управления в начальный момент пуска или торможения имеет намного большее значение, чем в установившемся режиме. По мере разгона ЭД или, наоборот, при его торможении форсировка сигнала снижается, в результате процессы разгона и торможения получаются ускоренными в начале и замедленными в конце. Поскольку форсировки сигнала могут достигать больших значений, то ток в процессе пуска и торможения может превышать допустимый, поэтому возникает необходимость введения ограничений тока или момента. В некоторых случаях перед нами стоит задача стабилизации момента, например, в приводах механизмов, работающих с резко переменной нагрузкой, или на упор. Стабилизация момента в рассматриваемых системах реализуется обычно с помощью ООС по току, что позволяет получить резкое снижение скорости при приблизительно постоянном моменте. С помощью ОС по току получают и необходимые динамические характеристики. Для ограничения тока или момента используется так называемая токовая отсечка. По сути это нелинейная ОС (задержанная ОС), которая вступает в действие лишь при определенных условиях (рис. 2.8).
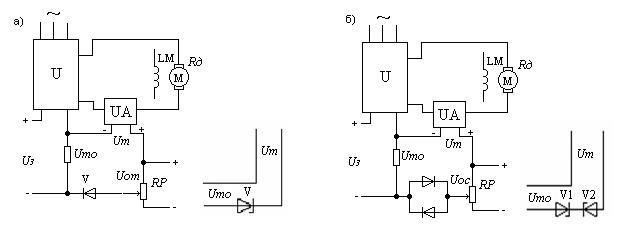
Рис.2.8. Схема задержанной ОС по току (а) для нереверсивного привода;
(б) для реверсивного привода.
Отсечка осуществляется введением в цепь ОС опорного напряжения  и вентиля V, обеспечивающего действие связи только при превышении сигналом ОС
и вентиля V, обеспечивающего действие связи только при превышении сигналом ОС  значения опорного напряжения, в результате сигнал обратной связи с отсечкой можно определить:
значения опорного напряжения, в результате сигнал обратной связи с отсечкой можно определить:
 ,
,
где  - единичная функция по току,
- единичная функция по току,
причем  при
при  и
и  при
при  .
.

|

| |||
 | |||

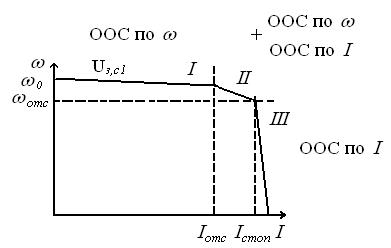
Рис.2.9. Электромеханическая характеристика привода с отсечкой по току
На рис 2.9:
Iст – ток стопорения;
Iот – ток отсечки.
На практике значение тока отсечки или соответствующее значение момента рассчитывается из условия электрической или механической прочности и обычно имеет вполне определенную величину, что позволяет осуществить отсечку за счет введения стабилитронов в цепь ОС (рис. 2.8).
Уравнение электромеханической характеристики ЭП в системах с токовой отсечкой и ОС по скорости и напряжению будет выглядеть так:
 (2.18)
(2.18)
Регулирование тока отсечки производится регулированием опорного напряжения . Уровень стабилизации тока двигателя при действии ОС по току может быть оценен по уравнению ЭДС преобразователя. Это уравнение записывают для случая стопорения двигателя (  ):
):
 .
.
Следовательно,
 . (2.19)
. (2.19)
Для того чтобы повысить уровень стабилизации момента, в систему вводят задержанную ОС по скорости (отсечку по скорости), которая позволяет отключить ОС по скорости, когда ток превышает значение тока отсечки. Поскольку настройка отсечки по скорости в момент отсечки по току затруднена, отсечку по скорости проводят чуть позже отсечки по току (рис. 2.10). Такая настройка ОС позволяет, кроме того, исключить снижение момента перегрузки двигателя при снижении напряжения цепи.
|
Рис.2.10. Электромеханическая характеристика привода с отсечкой
по току и скорости
Функциональная схема системы ЭП с отрицательными ОС по току и скорости с отсечками представлена на рис. 2.11. Отсечку по току осуществляет стабилитрон V1, т.к. уровень стабилизации тока (момента) может быть выбран однозначно, исходя из его допустимого или требуемого значения. Отсечку по скорости обеспечивает диод V2, когда опорное напряжение (по скорости) меньше напряжения датчика обратной связи (  ).
).
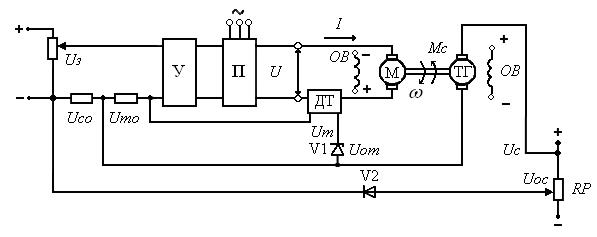
Рис.2.11. Схема замкнутой системы УП – Д с обратными связями по скорости и току с отсечками
Регулирование скорости в такой системе ЭП изменением задающего напряжения Uз невозможно, т.к. при уменьшении скорости ниже скорости отсечки (  ) ОС по скорости отключается. Скорость регулируется одновременно с изменением опорного напряжения (
) ОС по скорости отключается. Скорость регулируется одновременно с изменением опорного напряжения (  ).
).
Сравнение основных обратных связей. Характеристика обратных связейТаблица 2.1
| ОС | Статизм 
| Достоинства | Недостатки | Примечание |
| ООС по
|  при при 
| Высокая точность стабилизации скорости | Наличие тахогенератора | Широкое |
| ООС по U |  при при
| Простота измерения напряжения | Невысокая точность стабилизации скорости | Ограниченное, при невысоких требованиях к стабилизации скорости |
| ПОС по I | при 
| Простота измерения тока | 1) Зависимость точности стабилизации скорости от нелинейности характеристик усилителя и преобразователя.
2) Не обеспечивает стабилизацию при колебаниях 
| В чистом виде не применяется |
| ООС по E | 
| Сравнительная простота измерения ЭДС | Невысокая точность стабилизации скорости, так как не учтены реакция якоря и падение напряжения в щеточном контакте | Применяется при невысоких требованиях к стабилизации скорости и небольшом диапазоне регулирования |
Системы с подчиненным регулированием координат
В настоящее время наибольшее распространение получили системы управления с подчиненным регулированием координат.

Рис 2.12. Структурная схема привода с подчиненным регулированием координат
Система состоит из нескольких вложенных один в другой контуров. Число контуров равно числу регулируемых координат. Регуляторы включены последовательно. Каждый внешний регулятор является задающим по отношению к внутреннему, кроме того, на вход регулятора подается сигнал ОС по регулируемой координате. В этой системе удобно осуществлять настройку регулятора, поскольку каждый контур, начиная с внутреннего, можно рассматривать независимо. [2, 4, 5, 11]
Особенности выбора регуляторов в системе с подчиненным регулированием координат. Методика расчета систем с подчиненным регулированием основана на том, что контур регулирования должен содержать только одну большую постоянную времени. В этом случае регулятор подбирают таким образом, чтобы при последовательном включении его с соответствующим звеном системы была скомпенсирована большая постоянная времени объекта регулирования и взамен в контуре действовала бы существенно меньшая постоянная времени. Результирующее эквивалентное звено, состоящее из последовательно включенных регулятора и объекта, должно быть интегрирующим, то есть:
 . (2.20)
. (2.20)
Рассмотрим конкретные примеры:
1-й пример. Объект представляет собой интегрирующее звено.
а)  , если регулятор пропорциональный, то
, если регулятор пропорциональный, то  , тогда имеем
, тогда имеем  ,
,
где  при
при  .
.
Передаточная функция замкнутого контура имеет вид:
 .
.
б)  => и =>
=> и =>  ,
,
где при .
В этом случае  .
.
2-й пример. Объект представляет собой апериодическое звено.
а)  =>
=>  и=>
и=>  .
.
В результате  .
.
б)  =>
=>  и=>
и=>  .
.
В этом случае .
В системах подчиненного регулирования используются четыре вида регуляторов:
1) П-регуляторы:  ,
,
2) И-регуляторы:  ,
,
3) ПИ-регуляторы:  ,
,
4) ПИД-регуляторы:  .
.
Когда необходимо компенсировать две большие постоянные времени используется ПИД-регулятор.
Такая методика позволяет обеспечивать единый подход к синтезу регуляторов в каждом из контуров. Некоторые сложности при использовании данной методики вносит ДПТ НВ, за счет наличия внутренней ОС по ЭДС.
 а)
а)
б)
Рис.2.13. Структурная схема двигателя с ОС по ЭДС до (а) и после переноса ОС (б)
Перенос точки ОС не влияет на передаточную функцию Д, но и не дает нужного эффекта, так как в этом случае объект имеет две большие постоянные времени.
Поэтому для упрощения пренебрегают ООС по ЭДС. Тогда передаточная функция Д будет иметь вид:
 . (2.21)
. (2.21)
Конечно, это приводит к определенной погрешности, но она не существенно влияет на результаты расчета.
Выбор постоянных времени регулятора
Регулятор подбирается из условия компенсации большой постоянной времени контура и ее замены малой постоянной времени регулятора. Увеличивая коэффициент передачи регулятора, можно сделать постоянную времени регулятора очень малой. Это было бы хорошо, если бы мы имели идеальный случай, когда в системе нет других постоянных времени, кроме учтенных.
Так как в САР имеют место малые неучтенные постоянные времени, величина постоянной времени регулятора ограничивается. Она должна выбираться из условия  , где
, где  - постоянная времени регулятора, а
- постоянная времени регулятора, а  - малая некомпенсируемая постоянная времени контура. Это ограничение необходимо для того, чтобы исключить непредсказуемость в характере переходного процесса, который при малости постоянной времени регулятора может определяться величиной . При наличии в САР безынерционного усилителя это условие выглядит следующим образом:
- малая некомпенсируемая постоянная времени контура. Это ограничение необходимо для того, чтобы исключить непредсказуемость в характере переходного процесса, который при малости постоянной времени регулятора может определяться величиной . При наличии в САР безынерционного усилителя это условие выглядит следующим образом:
 , (2.22)
, (2.22)
а если в системе несколько не компенсированных постоянных времени  , то
, то  (2.23)
(2.23)
или  .
.
Такой учет малых постоянных времени закономерен, так как:

Запишем передаточную функцию разомкнутой системы:
 .
.
Передаточная функция регулятора:
 .
.
Следовательно:
 .
.
Передаточная функция замкнутой системы:
 ,
,
где  .
.
Характеристическое уравнение этой системы будет выглядеть следующим образом:  .
.
Следовательно, собственная частота контура:
 , коэффициент демпфирования:
, коэффициент демпфирования:  .
.
Характер переходного процесса в системе будет определяться отношением  .
.
Если  , имеем
, имеем  , тогда
, тогда  и перерегулирование
и перерегулирование  , а если
, а если  , то
, то  и получаем апериодический переходный процесс.
и получаем апериодический переходный процесс.
Малые некомпенсируемые постоянные времени приводят к увеличению фазового сдвига. Полагая, что они соответствуют апериодическому звену, можно записать фазовый сдвиг:
 .
.
Определим отставание при частоте среза  :
:
 , (2.24)
, (2.24)
при получим  ,
,
а при  получим
получим  .
.
Запаздывание, вносимое тиристорным преобразователем, учитывают как влияние малой некомпенсируемой постоянной времени, принимая ее равной времени запаздывания. При этом на частоте среза получаем те же фазовые сдвиги. Преобразователь при этом представляют апериодическим звеном:
 . (2.25)
. (2.25)
Синтез систем подчиненного регулирования.Рассмотрим синтез системы стабилизации скорости вращения ДПТ НВ [2, 4, 5, 11].
Исходная структурная схема разомкнутой системы представлена на рис. 2.14.

Рис. 2.14. Структурная схема разомкнутой системы
Главная задача в этом случае – регулирование частоты вращения, и, следовательно, наружный контур будет контуром скорости. В качестве внутреннего выделим контур тока (рис. 2.15).
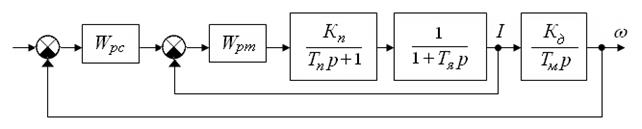
Рис.2.15. Структурная схема регулирования скорости
Синтез системы начинают с внутреннего контура (рис. 2.16).
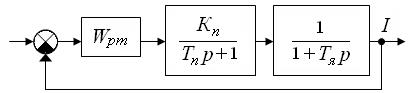
Рис.2.16. Структурная схема внутреннего контура тока.
Передаточная функция объекта регулирования во внутреннем контуре:
 .
.
Так как  , задача при выборе регулятора будет состоять в том, чтобы скомпенсировать большую постоянную времени контура; считаем, что
, задача при выборе регулятора будет состоять в том, чтобы скомпенсировать большую постоянную времени контура; считаем, что  малая некомпенсируемая постоянная времени (
малая некомпенсируемая постоянная времени (  ). Очевидно, чтобы получить в результате введения регулятора интегрирующее звено, регулятор должен иметь передаточную функцию вида:
). Очевидно, чтобы получить в результате введения регулятора интегрирующее звено, регулятор должен иметь передаточную функцию вида:
Тогда результирующая передаточная функция прямой цепи будет:  .
.
Расчет ведем на технический оптимум, таким образом . Принимаем  .
.
Запишем передаточную функцию в следующем виде:  .
.
Определим передаточную функцию замкнутого контура тока:  .
.
Если раскрыть скобки в знаменателе, то получим член с  ; учитывая, что
; учитывая, что  малая величина, этим членом часто пренебрегают. Тогда:
малая величина, этим членом часто пренебрегают. Тогда:  .
.
Определив таким образом передаточную функцию регулятора тока, переходим к синтезу регулятора скорости, то есть к расчету наружного контура системы. Наружный контур можно представить в следующем виде (рис. 2.17):

Рис.2.17. Структурная схема наружного контура скорости
Очевидно, что в данном случае величина  в знаменателе может считаться малой некомпенсируемой постоянной времени уже наружного контура.
в знаменателе может считаться малой некомпенсируемой постоянной времени уже наружного контура.
Передаточная функция объекта регулирования может быть записана для внешнего контура в следующем виде:
 .
.
Так как  , задача состоит в том, чтобы скомпенсировать большую постоянную времени
, задача состоит в том, чтобы скомпенсировать большую постоянную времени  . Для этого достаточно ввести в контур пропорциональный регулятор с передаточной функцией:
. Для этого достаточно ввести в контур пропорциональный регулятор с передаточной функцией:  и тогда передаточная функция прямой цепи будет иметь вид:
и тогда передаточная функция прямой цепи будет иметь вид:
 .
.
Так как  . Выберем
. Выберем  из следующего условия:
из следующего условия:  , где
, где  - малая некомпенсируемая постоянная времени наружного контура. Полагая , будем иметь
- малая некомпенсируемая постоянная времени наружного контура. Полагая , будем иметь  . В результате передаточная функция замкнутой системы:
. В результате передаточная функция замкнутой системы:
 .
.
Характеристическое уравнение:
 .
.
Собственная частота всей системы  , а коэффициент демпфирования λ =
, а коэффициент демпфирования λ =  . Таким образом перерегулирование переходного процесса будет составлять
. Таким образом перерегулирование переходного процесса будет составлять  .
.
Использование данной методики позволяет практически независимо рассчитывать параметры каждого регулятора.
При переходе от внутреннего контура к наружному при одном и том же значении  малая некомпенсируемая постоянная времени будет в раз больше у внешнего контура, чем у внутреннего. Система, у которой
малая некомпенсируемая постоянная времени будет в раз больше у внешнего контура, чем у внутреннего. Система, у которой  , рассматривается как система, настроенная на модульный (технический) оптимум. Такая настройка наиболее часто используется на практике. При
, рассматривается как система, настроенная на модульный (технический) оптимум. Такая настройка наиболее часто используется на практике. При  получаем систему с меньшим быстродействием, переходный процесс которой приближается к апериодическому.
получаем систему с меньшим быстродействием, переходный процесс которой приближается к апериодическому.
Рассмотренная система (рис.2.15) содержит только один интегрирующий регулятор, то есть она обладает свойствами астатической системы с астатизмом первого порядка. В тех случаях, когда необходимо исключить и скоростную ошибку, вводят еще один интегрирующий регулятор, так называемый регулятор ускорения (рис.2.18).

Рис.2.18. Структурная схема системы регулирования
с астатизмом второго порядка
Из вышеприведенного примера:
передаточная функция замкнутого контура тока  ,
,
передаточная функция регулятора ускорения:  .
.
Цепь обратной связи датчика ускорения подключаем к датчику тока, так как при отсутствии статической нагрузки ускорение пропорционально току якорной цепи.
При ,  ,
,
 .
.
Пренебрегая , получим:  .
.
Результирующая передаточная функция разомкнутой цепи контура скорости:
 .
.
Очевидно, что для компенсации необходимо, чтобы , то есть имеем пропорциональный регулятор скорости. Подставляя это выражение в передаточную функцию, получим:
 .
.
Учитывая, что настройка идет на технический оптимум, то есть , получим:
 .
.
В результате передаточная функция замкнутой системы с астатизмом второго порядка будет иметь вид:
 .
.
Характеристическое уравнение:  .
.
Собственная частота всей системы  .
.
Коэффициент демпфирования λ = .
В данной системе за счет двух интегрирующих регуляторов исключается скоростная ошибка.
В тех случаях, когда есть необходимость уменьшить количество контуров, применяют искусственный прием преобразования структурных схем. Рассмотренную выше трехконтурную систему, используя метод преобразования, можно представить как двухконтурную (рис.2.19).

Рис.2.19. Преобразованная структурная схема системы регулирования
с астатизмом второго поряд
| <== предыдущая лекция | | | следующая лекция ==> |
| Синтез в жидкой фазе. | | |
Дата добавления: 2022-05-27; просмотров: 70;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
