Пример расчета рамы методом перемещений
Расчетная схема рамы представлена на рис. 9.1, основная система – на рис. 9.2.
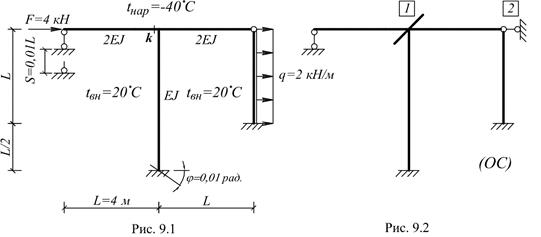
Перемещения Z1 и Z2 определяются из условия равенства нулю в дополнительных связях 1 и 2 . Эти условия записываются в форме канонических уравнений метода перемещений:
 (9.1)
(9.1)
В первом уравнении написано, что реакция (момент) в первой связи равна 0, во втором – реакция (усилие) во второй связи равна 0.
9.1. Определение коэффициентов канонических уравнений
Изгибающие моменты и поперечные силы, возникающие в стержнях основной системы, определяются по таблицам Приложения 1.
Определение rik
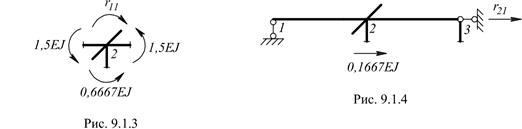
Схема деформирования и эпюра моментов от единичного смещения первой связи (поворот узла на Z1 = 1) представлены на рис. 9.1.1 и 9.1.2 соответственно. Схемы определения реакций во введенных связях – на рис. 9.1.3, 9.1.4.
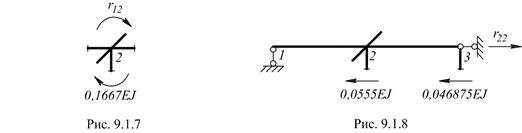
Схема деформирования и эпюра моментов от единичного смещения второй связи (линейное перемещение на Z2 = 1) представлены на рис. 9.1.5 и 9.1.6 соответственно. Схемы определения реакций во введенных связях – на рис. 9.1.7, 9.1.8.


Определение r11 Определение r21

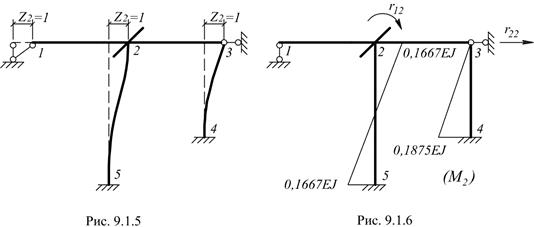

Определение r12 Определение r22

Определение свободных членов R1 и R2 от силового воздействия
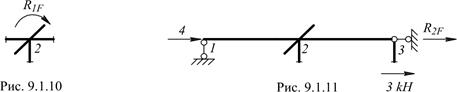
Эпюра моментов в ОС от силового воздействия представлена на рис. 9.1.9. Схемы определения реакций во введенных связях – на рис. 9.1.10, 9.1.11
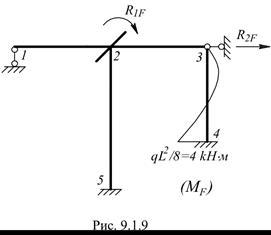
Определение R1F Определение R2F


Определение свободных членов R1 и R2 от температурного воздействия
В начале найдем усилия в основной системе, возникающие в результате изменения длин стержней. Средняя температура по высоте поперечного сечения стержней 1–2, 2–3 и 3-4 равна  , а в стержне 2-5 –
, а в стержне 2-5 –  . Приращения длин стержней определяются по формуле
. Приращения длин стержней определяются по формуле  .
.
Схема деформирования и эпюра моментов от изменения длин стержней представлены на рис. 9.1.12 и 9.1.13 соответственно. Схемы определения реакций во введенных связях – на рис. 9.1.14, 9.1.15.
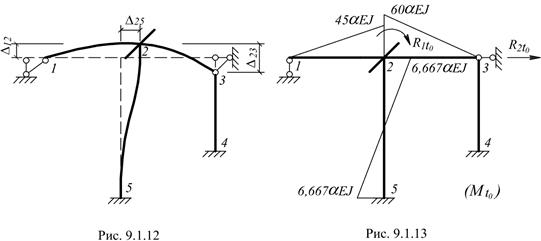


Определение R1t0 Определение R2t0



Далее найдем усилия, возникающие в результате искривлений стержней. Они вызываются температурной составляющей  и определяются по таблице Приложения 1. Для стержней 1-2, 2-3 и 3-4
и определяются по таблице Приложения 1. Для стержней 1-2, 2-3 и 3-4  для стержня 2-5
для стержня 2-5  . Эпюра моментов от искривления стержней представлена на рис. 9.1.16. Схемы определения реакций во введенных связях – на рис. 9.1.17, 9.1.18.
. Эпюра моментов от искривления стержней представлена на рис. 9.1.16. Схемы определения реакций во введенных связях – на рис. 9.1.17, 9.1.18.

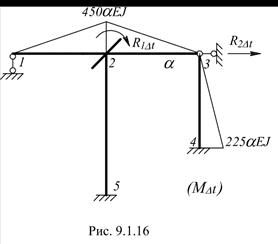
Определение R1Dt Определение R2Dt
 |


Эпюру (Mt) получаем как сумму:
(Mt) = (Mt0)+(MDt) – рис. 9.1.19.
Полные значения реакций во введенных связях получаем также суммированием:
R1t = R1t0 + R1Dt; R2t = R2t0 + R2Dt .
Итак, R1t = –21,67aEJ;
R2t = (2,222 – 56,25)aEJ = –54,03aEJ.
Определение свободных членов R1 и R2 от кинематического воздействия
Здесь усилия в элементах основной системы определяются также по таблицам Приложения 1.
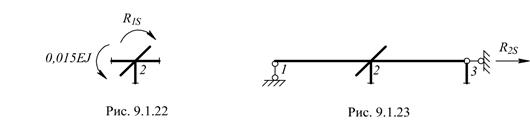
Сначала рассмотрим действие только S. Схема деформирования и эпюра моментов (MS) представлены на рис. 9.1.20 и 9.1.21 соответственно. Схемы определения реакций во введенных связях – на рис. 9.1.22, 9.1.23.


Определение R1S Определение R2S

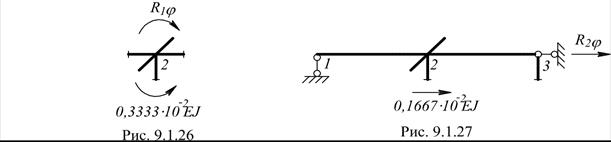
Теперь рассмотрим действие j. Схема деформирования и эпюра моментов (Mj) представлены на рис. 9.1.24 и 9.1.25 соответственно. Схемы определения реакций во введенных связях – на рис. 9.1.26, 9.1.27.


Определение R1j Определение R2j



Эпюру (MD) получаем как сумму:
(MD) = (MS)+(Mj) – рис. 9.1.28.
Полные значения реакций во введенных связях получаем также суммированием:
R1D = R1S + R1j; R2t = R2S + R2j.
Итак, R1D = (1,5 + 0,3333)×10–2EJ =
= 1,8333×10–2EJ;
R2D = –0,1667×10–2EJ.
9.2. Определение неизвестных Z1 и Z2
Канонические уравнения в матричной форме имеют вид
AZ + B=0. (9.2.1)
В нашем примере
 ,
,
 .
.
Таким образом уравнение (9.2.1) приобретает вид

Решение этого уравнения приведено в распечатке рабочей страницы Matlab (рис. 9.2.1).
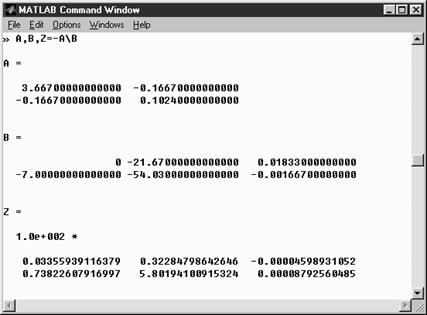
Рис. 9.2.1
9.3. Построение эпюр, проверка решения, определение перемещений от силового воздействия
Построение эпюр
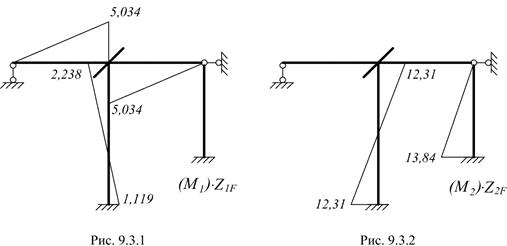
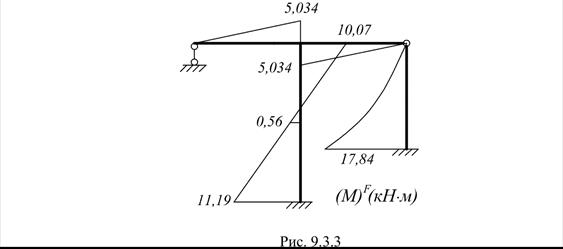
Построение окончательной эпюры (М)F представлено на рис. 9.3.1–9.3.3.
(M)F = (M1)×Z1 + (M2)×Z2 + (MF)
Z1F = 3,356/EJ, Z2F = 73,82/EJ.
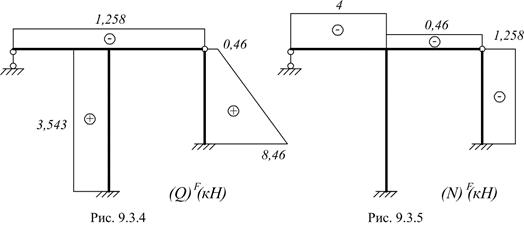
Окончательные эпюры (Q)F и(N)F представлены на рис. 9.3.4, 9.3.5.
Кинематическая проверка
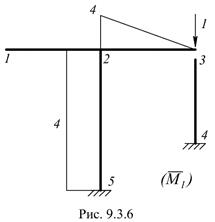
Найдем вертикальное перемещение узла 3 (рис. 9.3.6), которое по условию должно быть равно нулю.

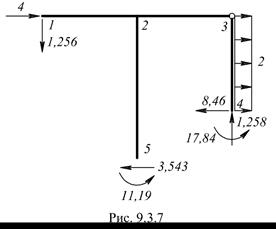
Проверка равновесия рамы в целом

Определение перемещений сечения k
Линейное перемещение dkF
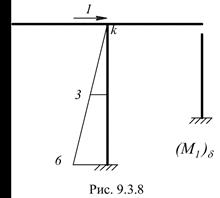
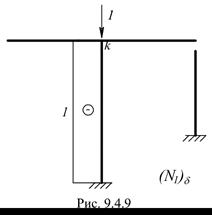
Единичная эпюра (M1)d в основной системе метода сил для определения линейного перемещения сечения k представлена на рис. 9.3.8.

Угол поворота qkF
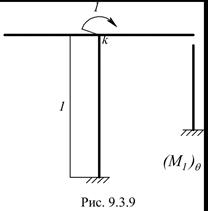
Единичная эпюра (M1)q в основной системе метода сил для определения угла поворота сечения k представлена на рис. 9.3.9.

Построение деформированной схемы рамы

Деформированная схема рамы представлена на рис. 9.3.10.
9.4. Построение эпюр, проверка решения, определение перемещений от температурного воздействия
Построение эпюр
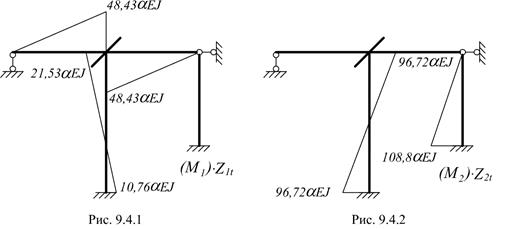
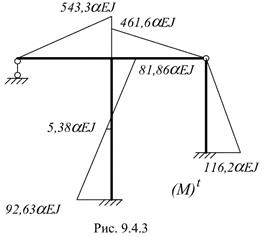
Построение окончательной эпюры (М)t представлено на рис. 9.4.1–9.4.3.
(M)t = (M1)×Z1t + (M2)×Z2t + (Mt)
Z1t = 32,29a, Z2t = 580,2a.
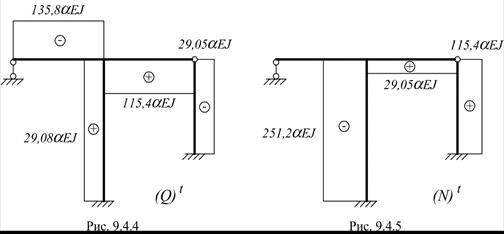
Окончательные эпюры (Q)t и(N)t представлены на рис. 9.4.4, 9.4.5.
Кинематическая проверка
Найдем относительное вертикальное перемещения концов стержней, сходящихся в узле 3 (рис. 9.4.6, 9.4.7), которое по условию должно быть равно нулю.
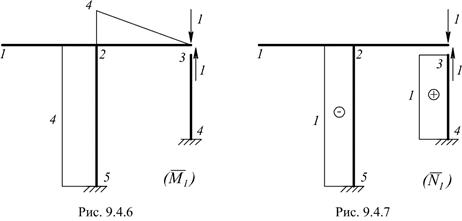
Это перемещение определяется по формуле:


Проверка подтверждает правильность решения.
Проверка равновесия рамы в целом


Определение перемещений сечения k
Линейное перемещение dkt
Единичная эпюра (M1)d в основной системе метода сил для определения линейного перемещения сечения k представлена на рис. 9.3.8. Для определения полного линейного перемещения необходимо в дополнение к эпюре (M1)d построить эпюры (M) и (N) от единичной вертикальной силы, приложенной в сечении k. В данном случае это приводит к появлению только продольной силы, показанной на эпюре (N1)d.

Знак (–) означает, что перемещение сеч. k происходит вверх. Таким образом, полное линейное перемещение:
 .
.
Угол поворота qkt
Единичная эпюра (M1)q для определения угла поворота сечения k представлена на рис. 9.3.9.
Поскольку в данном случае  и
и  , получаем:
, получаем:
 .
.
Построение деформированной схемы рамы

Деформированная схема рамы представлена на рис. 9.4.10.
9.5. Построение эпюр, проверка решения, определение перемещений от кинематического воздействия
Построение эпюр
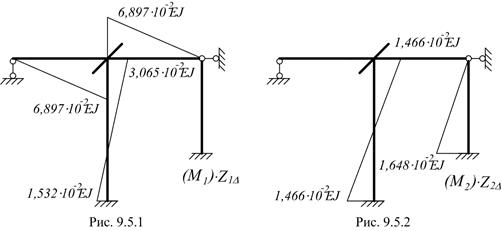
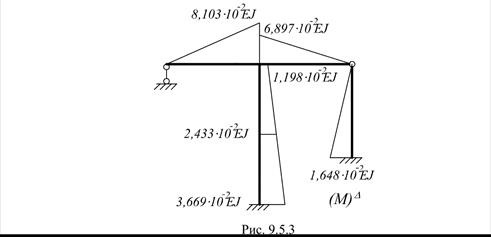
Построение окончательной эпюры (М)D представлено на рис. 9.5.1–9.5.3.


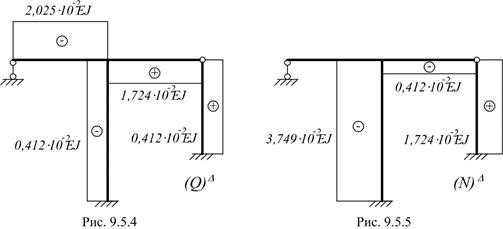
Окончательные эпюры (Q)D и(N)D представлены на рис. 9.5.4, 9.5.5.
Кинематическая проверка
Найдем относительное вертикальное перемещения концов стержней, сходящихся в узле 3 (рис. 9.4.6), которое по условию должно быть равно нулю.
Это перемещение определяется по формуле:
 .
.

Проверка подтверждает правильность решения.
 Проверка равновесия рамы в целом
Проверка равновесия рамы в целом
Определение перемещений сечения k
Линейное перемещение dkD
Единичная эпюра (M1)d в основной системе метода сил для определения линейного перемещения сечения k представлена на рис. 9.3.8. Полное линейное перемещение равно горизонтальному перемещению сеч. k, поскольку продольная деформация стойки 2-5 не учитывается.
В данном случае перемещения определяются по формуле:
 .
.

Угол поворота qkt
Единичная эпюра (M1)q для определения угла поворота сечения k представлена на рис. 9.3.9.


Построение деформированной схемы рамы
Деформированная схема рамы представлена на рис. 9.5.7.
10. Контрольные вопросы по методу перемещений
1. Метод перемещений. Как Вы понимаете идею метода перемещений?
2. Что принимается за неизвестные метода перемещений? Что такое основная и эквивалентная системы метода перемещений?
3. Как найти степень кинематической неопределимости?
4. Как определяются свободные члены канонических уравнений метода перемещений способом «перемножения эпюр»?
5. Как определяются свободные члены при расчете на температурные воздействия? Покажите на примере.
6. Как определяются свободные члены при расчете на заданные смещения? Покажите на примере.
7. Физический смысл и особенности канонических уравнений метода перемещений.
ПРИЛОЖЕНИЯ
Дата добавления: 2022-07-20; просмотров: 96;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
