Расчет балки методом перемещений, Исходные данные, схемы балок
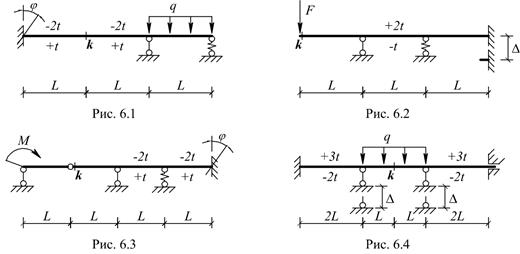
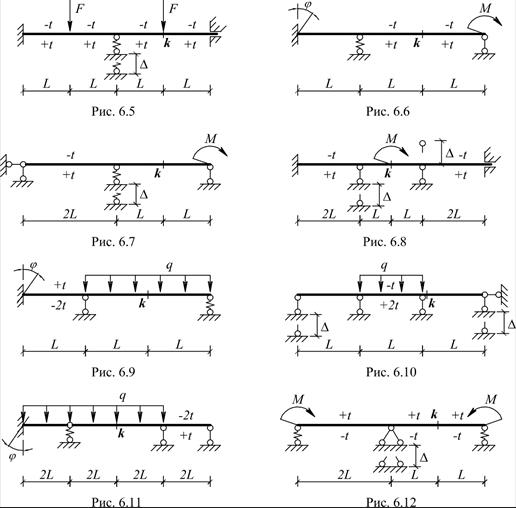
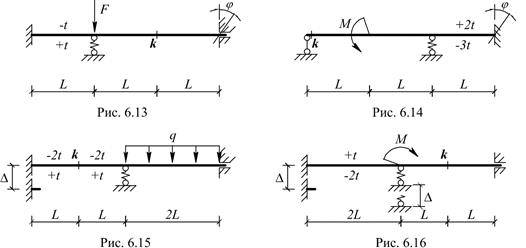
Для одной из заданных схем балок, изображенных на рис. 6.1–6.24 требуется:
a) изобразить расчетную схему, основную систему и эквивалентную системы;
b) изобразить основную систему, деформированную единичным и заданными воздействиями. Показать на этих рисунках величины, входящие в канонические уравнения;
c) построить эпюры внутренних силовых факторов, возникающих от нагрузки, изменения температуры и заданного смещения опор;
d) найти линейное и угловое перемещения сечения k при всех трех воздействиях;
e) изобразить балку, деформированную каждым из трех воздействий отдельно.
Принять: жесткость балки EI, высоту поперечного сеченияh = 0,1 L, коэффициент теплового расширения α – постоянными по длине балки; жесткость податливых связей равной k = EI/L3 (податливость – l = L3/EI), φ = ∆/L. Другие данные принять по табл. 6.1.
Таблица 6.1
| Номер варианта | |||||||
| F, кН | |||||||
| q, кН/м | |||||||
| М, кН×м | |||||||
| L,м | |||||||
| D, м | 0,01 | 0,02 | 0,03 | 0,04 | 0,01 | 0,02 | 0,03 |
| t, °С |
7. Пример расчета балки методом перемещений
Расчетная схема балки представлена на рис. 7.1, основная система – на рис. 7.2.
|
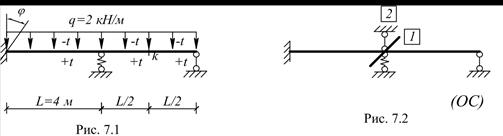
В качестве неизвестных здесь приняты: Z1 – угол поворота узла B и Z2 – вертикальное перемещение этого узла. Они определяются из условий равенства нулю реакций в дополнительных связях 1 и 2 , которые записываются в форме канонических уравнений метода перемещений:
 (7.1)
(7.1)
В первом уравнении написано, что реакция (момент) в первой связи равна 0, во втором – реакция (усилие) во второй связи равна 0.
7.1. Определение коэффициентов канонических уравнений
Изгибающие моменты и поперечные силы, возникающие в стержнях основной системы, определяются по таблицам Приложения 1.
Определение rik
Схема деформирования и эпюра моментов от единичного смещения первой связи (поворот узла на Z1 = 1) представлены на рис. 7.1.1 и 7.1.2 соответственно. Схемы определения реакций во введенных связях – на рис. 7.1.3, 7.1.4.
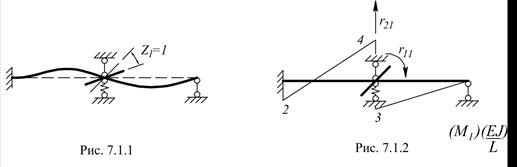
Определение r11 Определение r21
|
|
|


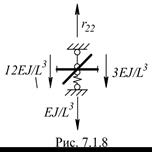
Схема деформирования и эпюра моментов от единичного смещения второй связи (линейное перемещение на Z2 = 1) представлены на рис. 7.1.5 и 7.1.6 соответственно. Схемы определения реакций во введенных связях – на рис. 7.1.7, 7.1.8.
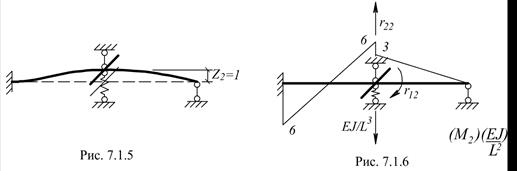
Определение r12 Определение r22
|
| |
|
|

Определение свободных членов R1 и R2 от силового воздействия
Эпюра моментов в ОС от силового воздействия представлена на рис. 7.1.9. Схемы определения реакций во введенных связях – на рис. 7.1.10, 7.1.11.
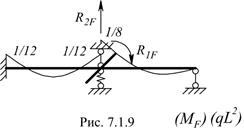
Определение R1F Определение R2F
|

|
|


Определение свободных членов R1 и R2 от температурного воздействия
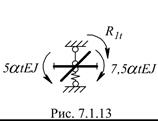
Эпюра моментов в ОС от температурного воздействия представлена на рис. 7.1.12. Схемы определения реакций во введенных связях – на рис. 7.1.13, 7.1.14.
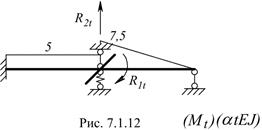
Определение R1t Определение R2t
|
|
|

Определение свободных членов R1 и R2 от кинематического воздействия
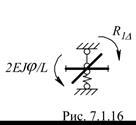
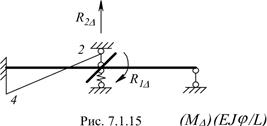 Эпюра моментов в ОС от кинематического воздействия представлена на рис. 7.1.15. Схемы определения реакций во введенных связях – на рис. 7.1.16, 7.1.17.
Эпюра моментов в ОС от кинематического воздействия представлена на рис. 7.1.15. Схемы определения реакций во введенных связях – на рис. 7.1.16, 7.1.17.
Определение R1D Определение R2D
|
|
|

7.2. Определение неизвестных Z1 и Z2
Запишем канонические уравнения (7.1) в матричной форме
A×Z+B = 0, (7.2.1)
где
 .
.
Таким образом, уравнение (7.2.1) приобретает вид

Решение этого уравнения приведено на рис. 7.2.1 в распечатке рабочей страницы Matlaba.
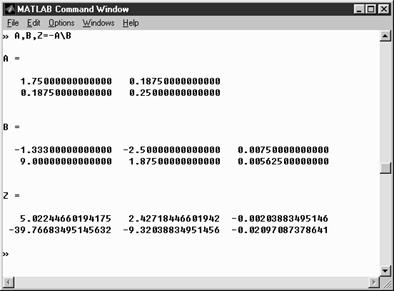
Рис. 7.2.1
Получено:

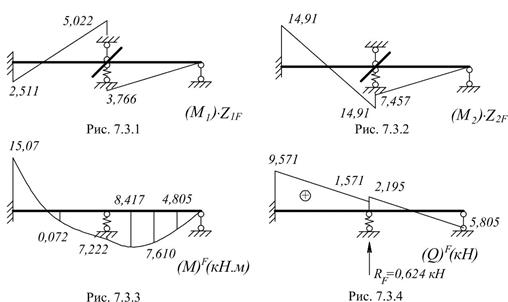
7.3. Построение эпюр, проверка решения, определение перемещений от силового воздействия
Построение эпюр
Построение окончательных эпюр (М)F и (Q)F представлено на рис. 7.3.1–7.3.4.
(M)F = (M1)Z1F + (M2)Z2F + (MF).
 .
.
Кинематическая проверка
|
 Проверка подтверждает правильность решения.
Проверка подтверждает правильность решения.
Проверка равновесия балки в целом
Определение перемещений сечения k
Вертикальное перемещение dkF
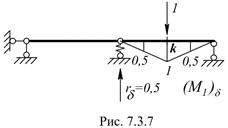
Единичные загружение и эпюра (M1)d для определения вертикального перемещения сечения k представлены на рис. 7.3.7.
Угол поворота qkF
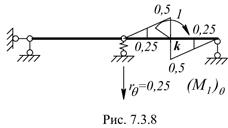
 Единичные загружение и эпюра (M1)q для определения угла поворота сечения k представлены на рис. 7.3.8.
Единичные загружение и эпюра (M1)q для определения угла поворота сечения k представлены на рис. 7.3.8.
Построение деформированной схемы балки
Для более качественного построения деформированной схемы балки найдем дополнительно вертикальное перемещение узла В.

Деформированная схема балки изображена на рисунке 7.3.9.
7.4. Построение эпюр, проверка решения, определение перемещений от температурного воздействия
Построение эпюр
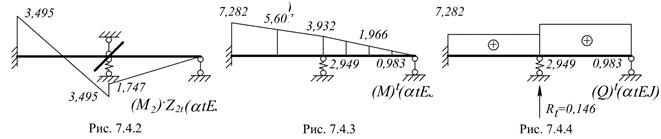
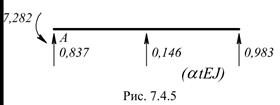
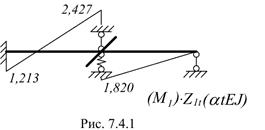 Построение окончательных эпюр (М)t и (Q)t представлено на рис. 7.4.1–7.4.4.
Построение окончательных эпюр (М)t и (Q)t представлено на рис. 7.4.1–7.4.4.
(M)t = (M1)Z1t + (M2)Z2t + (Mt).
Z1t = 2,427at, Z2t = –9,320at.
Кинематическая проверка
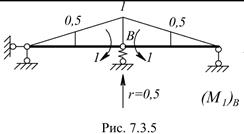
Найдем взаимный угол поворота сечений в узле B (рис. 7.3.5), который по условию должен быть равен нулю.
 Проверка подтверждает правильность решения.
Проверка подтверждает правильность решения.
Проверка равновесия балки в целом
Определение перемещений сечения k
Вертикальное перемещение dkt
Единичные загружение и эпюра (M1)d для определения вертикального перемещения сечения k представлены на рис. 7.3.7.

Угол поворота qkt
Единичные загружение и эпюра (M1)q для определения угла поворота сечения k представлены на рис. 7.3.8.

Построение деформированной схемы балки
Для более качественного построения деформированной схемы балки найдем дополнительно вертикальное перемещение узла В.

Деформированная схема балки изображена на рисунке 7.4.6.
7.5. Построение эпюр, проверка решения, определение перемещений от кинематического воздействия
Построение эпюр
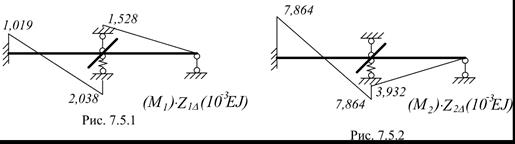
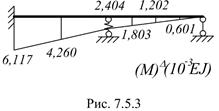
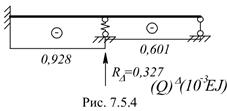
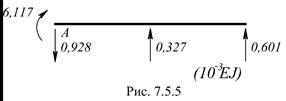
Построение окончательных эпюр (М)t и (Q)t представлено на рис. 7.5.1–7.5.4.
(M)D = (M1)Z1D + (M2)Z2D + (MD).
Z1D = –0,002038, Z2D = –0,0297.
Кинематическая проверка
Найдем взаимный угол поворота сечений в узле B (рис. 7.3.5), который по условию должен быть равен нулю.

Проверка подтверждает правильность решения.
Проверка равновесия балки в целом
Определение перемещений сечения k
Вертикальное перемещение dkD
Единичные загружение и эпюра (M1)d для определения вертикального перемещения сечения k представлены на рис. 7.3.7.

Угол поворота qkD
Единичные загружение и эпюра (M1)q для определения угла поворота сечения k представлены на рис. 7.3.8.

Построение деформированной схемы балки
Для более качественного построения деформированной схемы балки найдем дополнительно вертикальное перемещение узла В.

Деформированная схема балки изображена на рисунке 7.5.6.
Дата добавления: 2022-07-20; просмотров: 71;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
