Расчет рамы методом сил. Исходные данные, схемы рам
Для одной из заданных схем рам, изображенных на рис. 3.1–3.24 требуется:
a) изобразить расчетную схему, основную и эквивалентную системы;
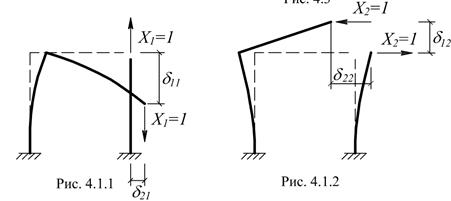
b) изобразить основную систему, деформированную единичными и заданными воздействиями. Показать на этих рисунках перемещения, входящие в канонические уравнения;
c) построить эпюры внутренних силовых факторов, возникающих от нагрузки, изменения температуры и заданного смещения опор;
d) сделать статические и кинематические проверки полученных решений;
e) найти полное линейное и угловое перемещения сечения k при всех трех воздействиях;
f) изобразить раму, деформированную каждым из трех воздействий отдельно.
Принять: изгибную жесткость стоек рамы равной EI, жесткость горизонтальных элементов и нижних частей стоек в схемах на рис. 3.16 и 3.18 равной 2EI;высоту поперечного сечения h = 0,1 L, коэффициент теплового расширения a – одинаковыми для всех стержней; центр тяжести поперечного сечения – в середине его высоты, j = D/2L. Другие данные принять по табл. 3.1.
Таблица 3.1
| Номер варианта | |||||||
| F, кН | |||||||
| q, кН/м | |||||||
| L,м | |||||||
| D, м | 0,01 | 0,02 | 0,03 | 0,04 | 0,05 | 0,02 | 0,01 |
| tвн, °С | |||||||
| tнар, °С | –30 | –35 | –20 | –22 | –28 | –40 | –22 |
 |
 |
 |
 |
4. Пример расчета рамы методом сил
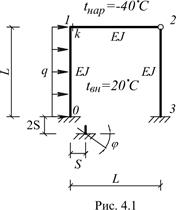
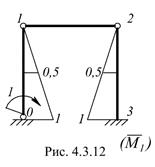
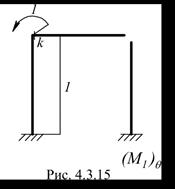
Расчетная схема рамы представлена на рис. 4.1, основная и эквивалентная системы – на рис. 4.2, 4.3 соответственно.
| |||
| |
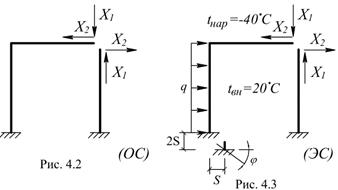
Силы X1 и X2 определяются из условий отсутствия взаимного перемещения концов стержней, сходящихся в шарнире (узел 2). Эти условия записываются в форме канонических уравнений метода сил:
 (4.1)
(4.1)
В первом уравнении написано, что перемещение по вертикали, а во втором – по горизонтали равны нулю.
Свободные члены уравнений D1 и D2 определяются от каждого воздействия отдельно.
4.1. Определение коэффициентов канонических уравнений
Определение dik
| |
Проверка правильности вычисления коэффициентов выполняется с помощью суммарной единичной эпюры (МS), представленной на рис. 4.1.5.
Определение свободных членов D1 и D2 от силового воздействия
Вид деформированной основной системы от силового воздействия представлен на рис. 4.1.6, эпюры (МF) – на рис. 4.1.7.
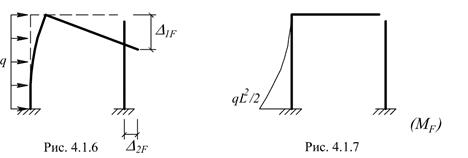
Проверка правильности вычисления коэффициентов выполняется с помощью суммарной единичной эпюры (МS), представленной на рис. 4.1.5.

D1F и D2F вычислены верно.
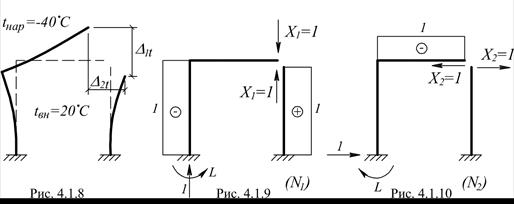
Определение свободных членов D1 и D2 от температурного воздействия
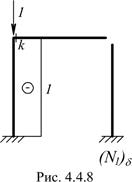
Вид деформированной основной системы от температурного воздействия представлен на рис. 4.1.8, единичные эпюры (N1) и (N2) – на рис. 4.1.9, 4.1.10 соответственно.
В этом случае формула для определения перемещений имеет вид:
В нашем примере получаем:
Определение свободных членов D1 и D2 от кинематического воздействия
Вид деформированной основной системы от кинематического воздействия представлен на рис. 4.1.11.
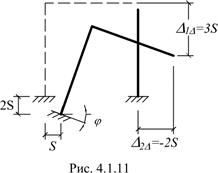 В этом случае формула для определения перемещений имеет вид:
В этом случае формула для определения перемещений имеет вид:

В нашем примере получаем:
4.2. Определение неизвестных усилий X1 и X2
Чтобы найти эти силы необходимо решить систему уравнений (4.1), которую для краткости запишем в матричной форме:
 (4.2.1)
(4.2.1)
где 
Матрица B и, как следствие, матрица X зависят от вида воздействия, в то время как матрица A остается неизменной.
Для решения уравнения (4.2.1) можно пойти следующими путями.
1. Троекратное решение системы уравнений второго порядка (поскольку в нашем примере три вида нагружений).
Так, при действии нагрузки матрица B имеет вид:
| и тогда уравнение (4.2.1) будет таким |  
|
Перемножив матрицы A и X, после упрощений получаем
Решив эту систему уравнений, находим: 
При температурном воздействии:
| уравнение (4.2.1) получает вид | 
|
Откуда 
Решив систему, находим: 
При расчете на смещения S и j:

| Уравнение (4.2.1) получает вид | 
|
Откуда 
2. Можно избежать троекратного решения системы уравнений, если воспользоваться матрицей A–1, обратной матрице A (см. Приложение 2).
Неизвестные в этом случае находятся по формуле (2) Приложения 2:
здесь 
Следовательно

Получаем  .
.
Откуда, после перемножения матриц, находим неизвестные
3. Если использовать возможности математической системы Matlab никакие вычисления "вручную" не потребуются.
Запишем уравнение AX + B = 0 в развернутом виде, умножив его на  .
.
Или в десятичных дробях

Обозначим  и
и 
Теперь обращаемся к Matlab и получаем X (рис. 4.2.1).
Рис. 4.2.1
Чтобы получить эту матрицу в окончательном виде вспомним, что первый ее столбец имеет множитель qL, второй –  , а третий –
, а третий –  . Заметим, кроме того, что
. Заметим, кроме того, что  , а
, а  .
.
Итак, 
Незначительные расхождения в результатах объясняются погрешностями ручного счета.
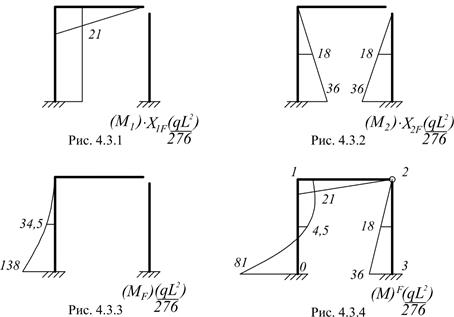
4.3. Построение эпюр, проверка решения, определение перемещений от силового воздействия
Построение эпюр
Построение окончательной эпюры (М)F, т.е. эпюры моментов, возникающих от нагрузки q, представлено на рис. 4.3.1–4.3.4.


Чтобы построить эпюру (Q)F найдем поперечные силы в каждом стержне отдельно (рис. 4.3.5–4.3.7).


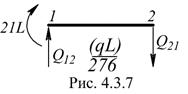
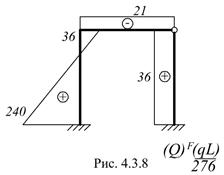 Окончательная эпюра (Q)F представлена на рис. 4.3.8.
Окончательная эпюра (Q)F представлена на рис. 4.3.8.
Когда поперечные силы найдены, из условий равновесия узлов рамы определяются продольные силы (рис. 4.3.9, 4.3.10).

|

Окончательная эпюра (N)F представлена на рисунке 4.3.11.
Кинематическая проверка
 Найдем угол поворота сечения на левой опоре (рис. 4.3.13), который по условию должен быть равен нулю.
Найдем угол поворота сечения на левой опоре (рис. 4.3.13), который по условию должен быть равен нулю.
Проверка равновесия рамы в целом (рис. 4.3.13)
Условия равновесия выполняются.
Можно сделать и другие статические проверки, например равновесие части рамы, равенства нулю изгибающего момента в шарнире (узел 2) и т.п.
Определение перемещений сечения k
Линейное перемещение dkF
Единичная эпюра (M1)d для определения линейного перемещения сечения k представлена на рис. 4.3.14.
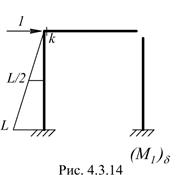
 Поскольку принято, что длины стержней при силовом нагружении не изменяются, то горизонтальное перемещение сечения k является его полным перемещением.
Поскольку принято, что длины стержней при силовом нагружении не изменяются, то горизонтальное перемещение сечения k является его полным перемещением.
Угол поворота qkF
Единичная эпюра (M1)q для определения угла поворота сечения k представлена на рис. 4.3.15.

 Построение деформированной схемы рамы
Построение деформированной схемы рамы
Деформированная схема рамы представлена на рис. 4.3.16.
4.4. Построение эпюр, проверка решения, определение перемещений от температурного воздействия
Построение эпюр
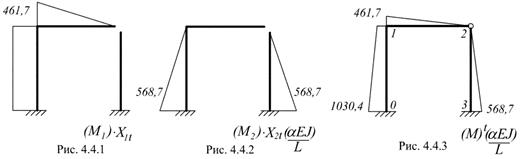
Построение окончательной эпюры (М)t представлено на рис. 4.4.1–4.4.3.


|
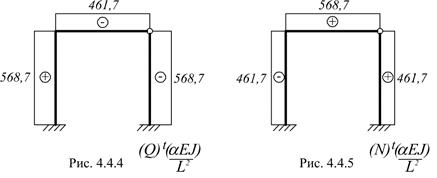
Правила построения эпюр (Q) и (N) подробно рассмотрены в разделе 4.3. Пользуясь этими правилами строим эпюры (Q)t и (N)t – рис. 4.4.4, 4.4.5.
Кинематическая проверка
Найдем угол поворота сечения на левой опоре (рис. 4.3.13), который по условию должен быть равен нулю. Дополнительная эпюра  , необходимая для нахождения угла поворота, представлена на рис. 4.4.6.
, необходимая для нахождения угла поворота, представлена на рис. 4.4.6.
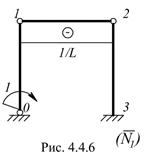
Проверка подтверждает правильность решения.
Проверка равновесия рамы в целом (рис. 4.4.7)
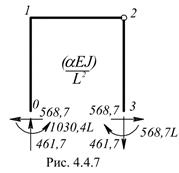

Условия равновесия выполняются.
Определение перемещений сечения k
Линейное перемещение dkt
Единичные эпюры (M1)d и (N1)d для определения линейного перемещения сечения k представлены на рис. 4.3.14 и 4.4.8 соответственно.
Угол поворота qkt
Единичная эпюра (M1)q для определения угла поворота сечения k представлена на рис. 4.3.15.

Построение деформированной схемы рамы
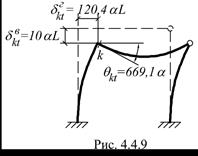
Деформированная схема рамы представлена на рис. 4.4.9.
4.5. Построение эпюр, проверка решения, определение перемещений от кинематического воздействия
Построение эпюр
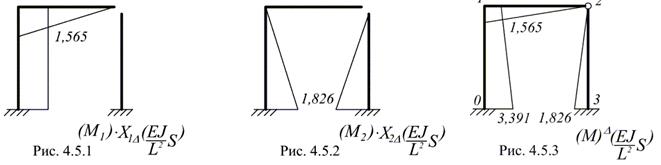
Построение окончательной эпюры (М)D представлено на рис. 4.5.1–4.5.3.


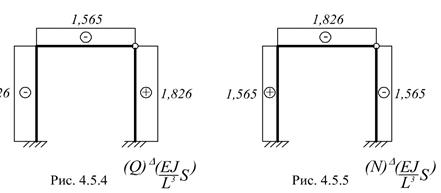
Эпюры (Q)D и (N)D представлены на рис. 4.5.4, 4.5.5.
Кинематическая проверка
Найдем угол поворота сечения на левой опоре (рис. 4.3.13), который по условию должен быть равен нулю.

Проверка подтверждает правильность решения.
Проверка равновесия рамы в целом (рис. 4.5.6)
Очевидно, что 

Условия равновесия выполняются.
Определение перемещений сечения k
Линейное перемещение dkD
Единичная эпюра (M1)d для определения линейного перемещения сечения k представлена на рис. 4.3.14.
Перемещения определяются по формуле 

 – по условию.
– по условию.
 м.
м.
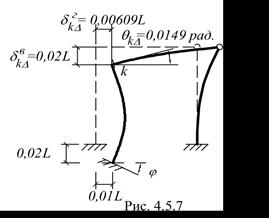
Угол поворота qkD
Единичная эпюра (M1)q для определения угла поворота сечения k представлена на рис. 4.3.15.
 рад.
рад.
Построение деформированной схемы рамы
Деформированная схема рамы представлена на рис. 4.5.7
|

5. Контрольные вопросы по методу сил
1. Какая система называется статически неопределимой? Как найти степень статической неопределимости?
2. Что принимается за неизвестные метода сил? Что такое основная и эквивалентная системы метода сил?
3. Как вы понимаете идею метода сил?
4. Как с помощью суммарной единичной эпюры проверить правильность коэффициентов канонических уравнений?
5. Как определяются свободные члены канонических уравнений при расчете на температурные воздействия, на заданные смещения?
6. Каков физический смысл и особенности канонических уравнений метода сил?
7. Каков физический смысл коэффициентов при неизвестных и свободных членов в канонических уравнениях?
МЕТОД ПЕРЕМЕЩЕНИЙ
Дата добавления: 2022-07-20; просмотров: 88;
Поиск по сайту

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
