Тема 3. Кинематический анализ механизмов
3.1. Задачи и методы кинематического анализа
Основным назначением механизма является выполнение требуемых движений, которые описываются с помощью кинематических характеристик.
Кинематический анализ — это изучение движения звеньев механизма без учета действующих сил.
Под кинематическими характеристиками понимаются перемещения, скорости и ускорения точек, а также угловые скорости и угловые ускорения звеньев. Определение траекторий точек необходимо для того, чтобы спроектировать, например, корпус машины, очертания картеров, исключить столкновение звеньев при движении и т.д. Кроме того, кинематический анализ дает возможность перейти к следующему этапу проектирования — динамическому расчету, при котором необходимо знать скорости и ускорения точек и звеньев.
Перемещения, скорости, ускорения определяют в пределах цикла работы механизма, т. е. за один оборот ведущего звена, для нескольких положений. Движение звеньев зависит от закона движения ведущего звена, поэтому при решении задач кинематического анализа должны быть заданы:
1) структурная схема механизма с указанием ее размеров (т. е. кинематическая схема);
2) закон движения начального звена.
Основные методы кинематического анализа:
— метод построения планов;
— метод кинематических диаграмм;
— аналитический метод.
Используя принципы структурного анализа, т.е. разложения механизма на группы Ассура, можно применять методы кинематического исследования не ко всему механизму в целом, а к отдельным его частям, что упрощает задачу.
Графические методы отличаются простотой и наглядностью, иногда они являются единственно приемлемыми, т.к. дают наиболее простое решение. Если же требуется провести большой объем однообразных построений, а также в том случае, когда необходимо провести расчеты с высокой точностью, целесообразно использовать аналитические методы.
3.2. Планы положений механизма
Изображение кинематической схемы механизма, соответствующее определенному положению начального звена, называется планом механизма. Планы строятся в заданном масштабе. При этом различают понятия «масштаб» и «масштабный коэффициент». Масштабом физической величины называют длину отрезка в миллиметрах, изображающую единицу измерения этой величины.
Масштабным коэффициентом физической величины называют отношение численного значения физической величины к длине отрезка в миллиметрах, изображающего эту величину.
Масштаб и масштабный коэффициент являются взаимно обратными величинами. Масштабные коэффициенты обозначают буквой μ с индексом, указывающим, к какой величине они относятся. Например, масштабный коэффициент длин (μ  ) для плана механизма есть отношение какой-либо длины (1АВ) в метрах к отрезку (АВ), изображающему эту длину на чертеже в миллиметрах:
) для плана механизма есть отношение какой-либо длины (1АВ) в метрах к отрезку (АВ), изображающему эту длину на чертеже в миллиметрах:
Рассмотрим построение планов механизма на примерах.
1. Шарнирный четырехзвенник (рис. 3.1). Кривошип ОА вращается с постоянной скоростью ω, поэтому положение точки А известно для любого момента времени (любого угла поворота звена ОА).
Делим окружность радиуса ОА на несколько равных частей, например на 6. Обозначим положения конца кривошипа точками А1? А2...А6.
Точка В (конец коромысла) движется по дуге окружности радиуса СВ. Проведем эту дугу из центра — точки С.
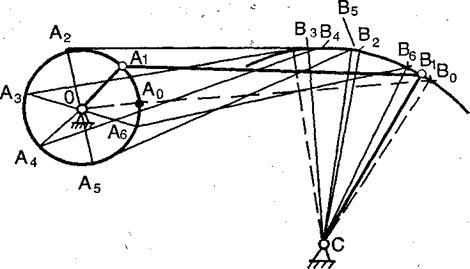
Рис. 3.1. Построение плана положений шарнирного четырехзвенника
Радиусом, равным длине шатуна АВ, делаем из точек А1, А2...А6 засечки на дуге окружности.
Соединяем одноименные положения точек А1и В1, А2 и В2..., а также В1и С,В2 и С... Получаем положения шатуна и коромысла за цикл движения, т.е. за один оборот кривошипа. Вращение коромысла против часовой стрелки соответствует положениям рабочего хода, по часовой стрелке — положениям холостого хода.
2. Кривошипно-ползунный механизм (рис. 3.2). Задаемся крайним положением кривошипа (кривошип и шатун располагаются на одной линии).
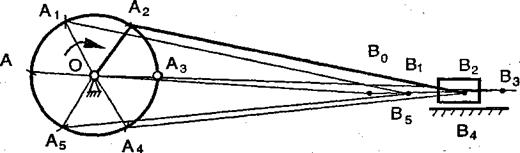
Рис. 3.2. Построение плана положений кривошипно-ползунного механизма
Делим окружность радиуса ОА на равные части. Из точек деления (A1,A2...) делаем засечки на оси движения ползуна (В1, В2...) радиусом, равным длине шатуна. Найденные положения точки В определяют положение поршня (ползуна) на рабочем ходу — В1, В2, В3; на холостом ходу — В4, В5. Соединяем одноименные точки (А1 и B2 , A2 и В2...).
3.3. Планы скоростей плоских механизмов
Планом скоростей называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек механизма в данном положении.
Для построения плана скоростей необходимы исходные данные:
1) план механизма с указанием размеров;
2) угловая скорость начального звена.
Из теоретической механики известно, что любое движение плоского тела может рассматриваться как сумма двух движений: вращение относительно некоторой точки (полюса) и поступательное (переносное) движение полюса. Используя этот принцип, рассмотрим решение задач о скоростях точек звеньев, образующих пары 5-го класса.
Правила построения плана скоростей:
1. На плане скоростей лучи, выходящие из полюса, изображают абсолютные скорости точек звена, а отрезки, соединяющие концы лучей, — относительные скорости соответствующих точек.
2. Векторы относительных скоростей направлены на плане скоростей к первой букве индекса. Например, VCB — скорость точки С относительно В. На плане скоростей читается наоборот: отрезок bс, а вектор направлен к точке с.
3. Векторы относительных скоростей точек жесткого звена образуют на плане скоростей фигуру, подобную этому звену, повернутую на 90° в направлении угловой скорости звена.
Последний вывод называется принципом подобия в плане скоростей и позволяет определить скорость любой точки звена графически, если известны скорости хотя бы двух точек этого звена.
3.4. Планы ускорений плоских механизмов
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данном положении, называется планом ускорений.
Дата добавления: 2016-11-29; просмотров: 8788;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Case-study (анализ конкретных ситуаций, ситуационный анализ)
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
