Фильтры нижних и верхних частот.
 В качестве фильтров нижних и верхних частот используется как нерекурсивные, так и рекурсивные цифровые фильтры (ЦФ), которые соответственно определяются соотношениями :
В качестве фильтров нижних и верхних частот используется как нерекурсивные, так и рекурсивные цифровые фильтры (ЦФ), которые соответственно определяются соотношениями :
где  —отсчеты входного и выходного сигналов фильтра соответственно (i=1, 2, 3, ...);
—отсчеты входного и выходного сигналов фильтра соответственно (i=1, 2, 3, ...);  -целые неотрицательные числа, определяющие пределы суммирования;
-целые неотрицательные числа, определяющие пределы суммирования;  —коэффициенты фильтра.
—коэффициенты фильтра.
Нерекурсивные ЦФ более сложны в вычислительном отношении, чем рекурсивные с аналогичными частотными характеристикам. Однако для рекурсивных фильтров труднее обеспечить линейность фазовой характеристики (т. е. постоянство временной задержки для составляющих всех частот), что очень важно при анализе сигнала, так как нелинейность фазовой характеристики может приводить к его изменению. Кроме того, для рекурсивных фильтров при реализации их микропроцессорами невысокой разрядности (8—16 бит) не всегда удается обеспечить устойчивость и избежать накопления ошибок, в то время как для нерекурсивных ЦФ этой проблемы не существует. В силу перечисленных причин более широкое распространение в алгоритмах оперативного анализа ритма сердца находят нерекурсивные фильтры, хотя это не исключает возможности использования в ряде случаев и рекурсивных ЦФ как в качестве ФВЧ, так и в качестве ФНЧ.
Используемые в КМ нерекурсивные ЦФ имеют обычно предельно упрощенный вид импульсных характеристик, что вызвано необходимостью снижения их вычислительной сложности. В частности, во многих разработках используются ФНЧ с прямоугольной или треугольной формой импульсных характеристик, которые соответственно описываются следующим образом:
 |
где  ; k — целое положительное число. Приведенные фильтры отличаются простотой реализации, но их АЧХ имеют значительные пульсации в области верхних частот (выше частоты среза), достигающие 20—25 % от максимального значения коэффициента передачи, что означает недостаточно хорошее подавление этими фильтрами высокочастотных помех. Предлагаются и более сложные в вычислительном отношении ФНЧ, которые способны обеспечить лучшее качество фильтрации.
; k — целое положительное число. Приведенные фильтры отличаются простотой реализации, но их АЧХ имеют значительные пульсации в области верхних частот (выше частоты среза), достигающие 20—25 % от максимального значения коэффициента передачи, что означает недостаточно хорошее подавление этими фильтрами высокочастотных помех. Предлагаются и более сложные в вычислительном отношении ФНЧ, которые способны обеспечить лучшее качество фильтрации.
Линейность фазовых характеристик нерекурсивных ЦФ обеспечивается при соблюдении одного из четырех условий симметрии импульсной характеристики:
симметричности при нечетном числе коэффициентов;
симметричности при четном числе коэффициентов;
антисимметричности при нечетном числе коэффициентов;
антисимметричности при четном числе коэффициентов.
Из перечисленных видов фильтров только первые два могут иметь частотную характеристику ФНЧ, причем фильтр с четным числом коэффициентов вносит задержку, кратную половине интервала дискретизации, что может создавать неудобства для дальнейшего анализа сигнала. Поэтому наиболее подходящими следует считать нерекурсивный ЦФ с симметричной импульсной характеристикой при нечетном числе коэффициентов, которые определяются соотношением:
 -
-
где  — отсчеты входного и выходного сигналов; N — число коэффициентов фильтров (длина импульсной характеристики);
— отсчеты входного и выходного сигналов; N — число коэффициентов фильтров (длина импульсной характеристики);
 — коэффициенты фильтра. Амплитудно-частотная характеристика для такого фильтра может быть найдена по формуле:
— коэффициенты фильтра. Амплитудно-частотная характеристика для такого фильтра может быть найдена по формуле:
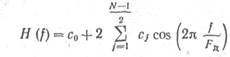 |
где  - частота дискретизации сигнала.
- частота дискретизации сигнала.
Идеальный фильтр нижних частот должен иметь АЧХ типа той, которая показана на рис. 6,а. Все составляющие входного сигнала с частотами ниже частоты среза Fc такой фильтр беспрепятственно пропускает, а остальные — полностью устраняет. Однако практическая реализация идеального фильтра невозможна, так как он должен был бы иметь бесконечное число коэффициентов. Вид асимптотической АЧХ фильтра, реализуемого на практике, приведен на рис. 6,6. Различают три диапазона частот:
 -полоса пропускания;
-полоса пропускания;
 - переходная полоса;
- переходная полоса;
 — полоса задержки.
— полоса задержки.
Здесь  и
и  - соответственно нижняя и верхняя границы переходной полосы. Амплитудно-частотную характеристику имеет смысл рассматривать в диапазоне частот от 0 Гц до половины частоты дискретизации
- соответственно нижняя и верхняя границы переходной полосы. Амплитудно-частотную характеристику имеет смысл рассматривать в диапазоне частот от 0 Гц до половины частоты дискретизации  , так как на интервале
, так как на интервале  она симметрично продолжается, а на более высоких частотах повторяется с периодом
она симметрично продолжается, а на более высоких частотах повторяется с периодом  В данном случае ширина переходной полосы
В данном случае ширина переходной полосы  . Казалось бы, чем уже переходная полоса, тем частотная характеристика ближе к идеальной и, следовательно, лучше фильтр. Однако это утверждение нельзя считать очевидным. У фильтров с более узкой переходной полосой сильнее проявляются пульсации, вызываемые высокочастотными компонентами входного сигнала, которые могут, например,, привести к возникновению ложных зубцов у желудочковых комплексов ЭКГ. Кроме того, такие фильтры имеют и более длинную :импульсную характеристику, что затрудняет их реализацию в устройствах оперативной обработки сигнала.
. Казалось бы, чем уже переходная полоса, тем частотная характеристика ближе к идеальной и, следовательно, лучше фильтр. Однако это утверждение нельзя считать очевидным. У фильтров с более узкой переходной полосой сильнее проявляются пульсации, вызываемые высокочастотными компонентами входного сигнала, которые могут, например,, привести к возникновению ложных зубцов у желудочковых комплексов ЭКГ. Кроме того, такие фильтры имеют и более длинную :импульсную характеристику, что затрудняет их реализацию в устройствах оперативной обработки сигнала.

Рис. 6. Амплитудно-частотная характеристика идеального (а) и приближенного к реальному (б) ФНЧ
Например, для оперативного анализа ритма сердца в микропроцессорных КМ наиболее подходящими оказываются ФНЧ с  =30 Гц и с
=30 Гц и с  = 20— 25 Гц при
= 20— 25 Гц при  =250 Гц. Этим условиям удовлетворяет ФНЧ, заданный уравнением:
=250 Гц. Этим условиям удовлетворяет ФНЧ, заданный уравнением:
 |
Его импульсная и амплитудно-частотная характеристики приведены на рис. 7. Как можно видеть, АЧХ этого фильтра близка к желаемой, а простота реализации обеспечивается тем, что его коэффициенты представляют собой правильные дроби со знаменателем, равным 32 = 25, а их сумма равна единице.
Реализация нерекурсивных ФВЧ оказывается значительно сложнее, чем реализация ФНЧ, так как требуемые для фильтрации ЭКС цифровые фильтры верхних частот могут иметь до 50 и более коэффициентов. Поэтому на практике удается использовать только сравнительно узкий класс нерекурсивных ФВЧ, которые могут быть сделаны простыми для вычисления. Наиболее часто для этой цели используют упоминавшиеся выше ФНЧ с прямоугольной или треугольной импульсной характеристикой, преобразованные в ФВЧ. Если ФНЧ задан выражением
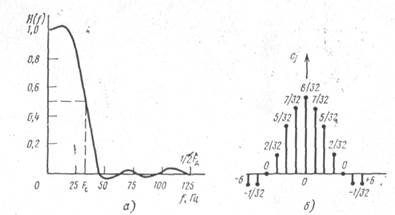 |
Рис. 7. Амплитудно-частотная (а) и импульсная (б) характеристики ФНЧ
 |
то соотношение вида
 |
соответствует фильтру верхних частот с амплитудно-частотной характеристикой
 |
где  — амплитудно-частотная характеристика взятого за основу ФНЧ. Здесь необходимо оговориться, что это справедливо лишь при выполнении условия:
— амплитудно-частотная характеристика взятого за основу ФНЧ. Здесь необходимо оговориться, что это справедливо лишь при выполнении условия:
 |
чего на практике всегда можно достичь соответствующим масштабированием коэффициентов. На рис. 8 проиллюстрирован принцип построения ФВЧ на основе известного ФНЧ и показана взаимосвязь между их импульсными и амплитудно-частотными характеристиками.
Например, с точки зрения решения задачи обнаружения QRS-комплекса ЭКС на фоне помех наилучшие результаты дает применение ФВЧ с  = = 5 Гц и
= = 5 Гц и  =3—4 Гц. В качестве конкретного фильтра, удовлетворяющего указанным условиям и пригодного для реализации в микропроцессорных КМ, может быть предложен ФВЧ; коэффициенты Cj которого (при j = -22, -21, ..., 0, ..., 21, 22) имеют следующие значения:
=3—4 Гц. В качестве конкретного фильтра, удовлетворяющего указанным условиям и пригодного для реализации в микропроцессорных КМ, может быть предложен ФВЧ; коэффициенты Cj которого (при j = -22, -21, ..., 0, ..., 21, 22) имеют следующие значения:
 |
Этот ЦФ получен подбором коэффициентов на основе фильтра с треугольной импульсной характеристикой. Нетрудно показать, что
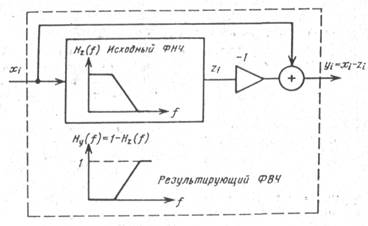
Рис. 8. Построение ФВЧ на основе известного ФНЧ
V
данный ФВЧ может быть преобразован в рекуррентную форму
 |
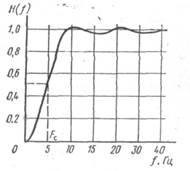
что существенно упрощает его программную реализацию. Амплитудно-частотная характеристика этого фильтра показана на рис. 9.
 | |||
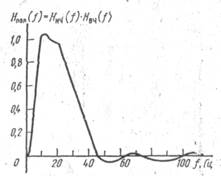 | |||
Рис. 9. Амплитудно-частотная ха
рактеристика ФВЧ
Рис. 10. Амплитудно-частотная характеристика результирующего полосового фильтра
Последовательная фильтрация сигнала с помощью ФНЧ и ФВЧ, АЧХ которых приведены на рис. 7 и 9, эквивалентна использованию полосового фильтра, частотная характеристика которого представлена на рис. 10, а на рис. 11 показаны примеры обработки фрагментов ЭКС с применением этих фильтров.
Еще одним примером применения нерекурсивных ФВЧ может служить процедура оценки зашумленности ЭКС по относительному содержанию в сигнале высокочастотных составляющих. Для этой цели часто используется вторая разность отсчетов сигнала, представляющая собой цифровой фильтр, задаваемый выражением
 | |||
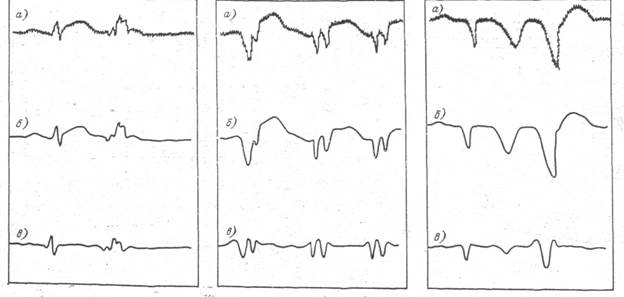 |
Рис. 11. Примеры предварительной обработки фрагментов ЭКС с помощью цифровой фильтрации:а — исходный ЭКС; б - ЭКС после ФНЧ; в - ЭКС после ФВЧ
Частотная характеристика этого фильтра для частоты дискретизации, равной. 250 Гц, показана на рис. 12. Как видно .из рисунка, фильтр усиливает составляющие сигнала, спектр которых лежит в полосе частот приблизительно от 40 Гц и выше, т. е. ту часть ЭКС, которая почти не содержит полезной для оперативного анализа информации.
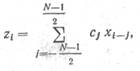
Для оценки уровня зашумленности сигнала обычно используют скользящее •среднее модулей отсчетов сигналя, прошедшего через ЦФ второй разности отсчетов:
 |
где zi — i-й отсчет скользящего среднего, а N — размер окна усреднения (как правило, N лежит в пределах от 10до 30). Уровень помех считают недопустимо высоким, если хотя бы для одного i, относящегося к анализируемому фрагменту сигнала, значение zi оказывается выше определенного порога. Высота этого порога зависит отзадач и условий обработки и должна подбираться экспериментально для каждого конкретного алгоритма.
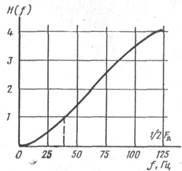 |
Рис. 12. Амплитудно-частотная характеристика фильтра для оценки зашумленности сигнала
СЖАТИЕ СИГНАЛА
Представление сигнала регулярной выборкой отсчетов, получаемой в результате его дискретизации, часто оказывается избыточным. Сократить избыточность позволяют методы сжатия данных, суть которых заключается в уменьшении объема исходной информации путем отбора меньшего числа существенных координат. Эти координаты могут быть получены либо в результате некоторого преобразования дискретного сигнала, либо выбраны непосредственно из исходной выборки отсчетов. Чаще всего сжатие данных связано с некоторой потерей информации, из-за чего исходный сигнал не может быть точно восстановлен.
Возможность получения эффективного сжатия сигнала связана с тем, что высокочастотные компоненты сигнала присутствуют на достаточно коротких отрезках времени. Частота дискретизации рассчитывается на допустимые ошибки дискретного представления именно этих фрагментов сигнала, поэтому описание регулярной выборкой отсчетов низкочастотных участков сигнала оказывается избыточным. Для устранения этой избыточности предложены различные методы сжатия, связанные с решением многих задач хранения, передачи и обработки сигнала.
Каждая из задач предъявляет свои требования к разрабатываемому методу сжатия и определяет его специфические особенности, но общим требованием является получение достаточно эффективного сокращения объема данных. Для оценки эффективности сжатого представления сигнала обычно применяют два показателя: коэффициент сжатия, определяемый отношением числа исходных отсчетов сигнала к числу полученных координат, и ошибка восстановления сигнала. В качестве последней чаще всего используется абсолютная или средняя квадратическая ошибка . Подход к выбору метода сжатия и оценка его эффективности должен определяться конкретной целью его применения. В .задачах хранения и передачи данных обычно задается допустимый уровень искажения восстановленного сигнала, а выбор конкретного метода осуществляется исходя из условий получения наилучшего значения коэффициента сжатия при известной или допустимой сложности реализации алгоритма кодирования-декодирования сигнала.
При использовании сжатия в качестве процедуры предварительной обработки сигнала в КМ критерий верности восстановления сигнала не всегда доминирует. Часто основным фактором становится возможность получения компактного описания, эффективно выявляющего структурные особенности анализируемого сигнала. Применяемый в этом случае метод сжатия должен сохранить образ обрабатываемой кривой, поскольку именно в нем содержится полезная информация, необходимая для распознавания сигнала. Кроме того, он должен отличаться высоким коэффициентом сжатия, простотой технической реализации и возможностью выбора координат в реальном масштабе времени.
Среди существующих методов сжатия данных можно выделить группу методов, основанных на разложении сигнала по ортогональным функциям. Применение для целей сжатия разложения Карунена-Лоэва, ряда Фурье, преобразования Хаара позволяет достигать высоких коэффициентов сжатия, однако требует большого объема вычислений. Кроме того, возникает проблема предварительного выделения цикла, что затрудняет реализацию этих методов в системах реального времени. Такое сжатие используется для хранения сигнала в автоматизированных архивах и передачи сигнала на расстояние, когда нет жестких требований к сложности алгоритмов обработки и скорости вычислений.
Широкое применение получили методы сжатия, основанные на амплитудно-временных преобразованиях сигнала. К наиболее простым относится метод разностного кодирования, который обеспечивает сокращение избыточности регулярной выборки отсчетов за счет уменьшения объема каждой координаты. Принцип кодирования заключается в том, что для каждого i-гo отсчета сигнала u(t), ui = u(ti), поступившего на вход алгоритма сжатия, вычисляется разность значений соседних ординат (uj—ui-1), которая по модулю, как правило, меньше значений самих отсчетов, особенно на участках сигнала с малой крутизной. Благодаря такому преобразованию удается уменьшить длину используемых слов, что приводит к сокращению объема памяти, необходимого для хранения и передачи сигнала. Важно отметить, что этот метод обеспечивает абсолютно точное восстановление дискретизованного сигнала. Если разрядность используемых кодовых слов значительно превышает разрядность вычисленных разностей, можно получить дополнительное сжатие данных за счет более компактного их размещения в информационном поле. Использование такого способа кодирования для хранения реализаций ЭКГ, представленных в виде последовательности отсчетов разрядностью 8—12 бит, следующих с частотой 500 Гц, 16-разрядными словами, позволяет обеспечивать сокращение объема памяти более чем в 4 раза.
Достаточно распространены методы сжатия сигнала, использующие аппроксимацию сигнала на отдельных временных отрезках различными функциями. В качестве аппроксимирующих функций могут быть взяты алгебраические полиномы разных степеней или специальные функции, но большинство алгоритмов предполагает использование низкостепенных приближающих функций (ступенчатая или линейная аппроксимация). Это объясняется в основном их относительной простотой и высоким быстродействием, что имеет решающее значение для задач передачи и обработки сигнала в реальном масштабе времени.
Среди методов описания сигнала специальными функциями известен метод кодирования ЭКС нерегулярными отсчетами. Задача аппроксимации рассматривается здесь как определение оптимального набора восстанавливающих фильтров с выбором из них линейно-независимых, которые определяют номера существенных отсчетов сигнала. Благодаря такому способу кодирования удается достичь коэффициентов сжатия порядка 15—20 в зависимости от сложности исходных кривых сигнала. Успешно применяют для сжатия ЭКС аппроксимацию сигнала кубическими сплайнами. Разработанный способ построения сглаживающего кубического, сплайна с адаптивным подбором шага на сетке узлов обеспечивает сокращение объема данных в 3—14 раз. Указанные методы сжатия сигнала с применением специальных функций представляются перспективными для обработки сигнала в текущем режиме, однако в настоящее время считаются сложными для реализации из-за большого объема вычислений.
Апертурные методы сжатия сигнала. Среди адаптивных методов приближения сигнала наибольший практический интерес представляют апертурные методы, осуществляющие контроль абсолютной ошибки при определении избыточных отсчетов и выборе существенных, т. е. передаваемых ординат. Они нашли широкое применение в задачах оперативной передачи и обработки сигнала из-за высокого быстродействия и простоты реализации.
Принцип их действия заключается в последовательном продви
жении по дискретным регулярным отсчетам u0, u1, u2, … полученным после дискретизации непрерывного сигнала, до некоторого
n-го отсчета, в котором отклонение аппроксимированной ординаты от исходной превышает некоторое значение, задаваемое апертурой d. Ордината un первой вышедшая за пределы коридора шириной d, принимается за условную существенную ординату. Кроме этого, вводится понятие существенной ординаты, используемой для передачи, обработки или восстановления сигнала. Выбор существенной ординаты зависит от конкретной реализации алгоритма.
Во всех алгоритмах используется апертура, фиксированная по величине (  , где
, где  - максимально допустимое отклонение) и центрированная относительно аппроксимирующей прямой (
- максимально допустимое отклонение) и центрированная относительно аппроксимирующей прямой (  ).
).
Наиболее прост в реализации метод сравнения дискретных отсчетов сигнала (  ,
,  , ...,
, ...,  , ...) с фиксированными уровнями θk = kd, k = 0, 1, 2, ..., при выбранном шаге квантования по уровню, равном d. Если для j-го участка аппроксимации, включающего п ординат, выполняется условие
, ...) с фиксированными уровнями θk = kd, k = 0, 1, 2, ..., при выбранном шаге квантования по уровню, равном d. Если для j-го участка аппроксимации, включающего п ординат, выполняется условие
 |
(1)
а n-й отсчет условию (1) не удовлетворяет, то j-иучасток задается амплитудой  и длительностью τj в виде
и длительностью τj в виде
Здесь значения уровней θk = kd, k = 0, 1, 2, ..., и соответственно областей нечувствительности к отклонениям сигнала, задаваемым интервалом  , устанавливаются заранее исходя из выбранного значения d и не зависят от динамических свойств сигнала. Иллюстрация данного метода в графическом виде дана на рис. 13, где сплошной линией показана реализация сигнала, а также ее ступенчатая аппроксимация. Здесь, как и на последующих рисунках, кружками отмечены выборки, подлежащие передаче.
, устанавливаются заранее исходя из выбранного значения d и не зависят от динамических свойств сигнала. Иллюстрация данного метода в графическом виде дана на рис. 13, где сплошной линией показана реализация сигнала, а также ее ступенчатая аппроксимация. Здесь, как и на последующих рисунках, кружками отмечены выборки, подлежащие передаче.
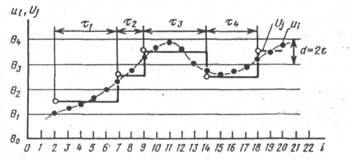 |
Рис. 13. Сжатие сигнала методом сравнения с фиксированными уровнями
Более эффективны адаптивные процедуры апертурного сжатия, использующие плавающую апертуру d, которая на очередном участке аппроксимации устанавливается определенным образом относительно последней выбранной существенной ординаты сигнала, и таким образом отслеживается изменение амплитуды сигнала. Процедура поиска существенных ординат здесь определяется характером аппроксимации: интерполяцией или экстраполяцией. В качестве аппроксимирующих функций чаще применяют полиномы нулевой, реже — первой степени.
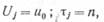
Для плавающей апертуры выбор существенной ординатыпри поступлении каждого i-го отсчета в последовательности (u0, u1, …,ui)осуществляется в результате сравнения разности определенных для конкретного алгоритма значений сигнала с апертурой d. Это условие для алгоритма экстраполяции нулевого порядка (ЭНП) имеет вид
 |
(2)
 а при использовании интерполяции нулевого порядка (ИНП) задается неравенством
а при использовании интерполяции нулевого порядка (ИНП) задается неравенством
(3)
где 
Если для i=п соответствующее условие нарушается, то (п—1)-й отсчет определяет конец текущего j-го участка аппроксимаций, а п-я выборка задает новое положение зоны допустимого отклонения значений сигнала шириной d. Из условий (2) и (3) следует, что положение плавающей апертуры при ЭНП фиксируется относительно начальной ординаты  , а при ИНП устанавливается лишь. с приходом (п—1)-го отсчета, вмещая в себя максимальное число избыточных отсчетов (рис. 14). Сжатое представление сигнала на j-м интервале аппроксимации для алгоритма ЭНП задается величина.ми
, а при ИНП устанавливается лишь. с приходом (п—1)-го отсчета, вмещая в себя максимальное число избыточных отсчетов (рис. 14). Сжатое представление сигнала на j-м интервале аппроксимации для алгоритма ЭНП задается величина.ми
 |
a для алгоритма ИНП определяется выражениями
 | |||
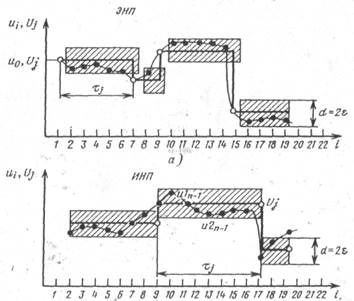 |
Рис. 14. Экстраполяция (а) и интерполяция (б) сигнала алгебраическими полиномами нулевой степени
Апертурная аппроксимация сигнала может быть реализована также путем сравнения отсчетов сигнала с его представлением .алгебраическими полиномами первой степени. Использование более сложных функций затрудняет обработку сигнала в реальном времени и не дает ощутимого выигрыша в коэффициенте сжатия.
В отличие от алгоритма ЭНП при экстраполяции .первого порядка (ЭПП) ось апертуры, являющаяся экстраполирующей прямой, располагается по линии, соединяющей первую ординату нового участка аппроксимации с предсказанным значением предыдущей ординаты. Все отсчеты сигнала, попавшие в достроенный таким образом коридор, считаются (избыточными, а первый, вышедший за его пределы, начинает следующий участок аппроксимации. На выход алгоритма сжатия могут передаваться предсказанное значение последнего отсчета аппроксимирующей прямой и длительность соответствующего участка аппроксимации.
В алгоритме -интерполяции первого порядка (ИПП), в отличие от ЭПП, ось апертуры с приходом каждого следующего отсчета меняет свое положение. Вначале она проходит через первую и третью ординату текущего участка аппроксимации. Если второй отсчет попал в апертуру, то он считается избыточным. С приходом следующего отсчета уравнение аппроксимирующей прямой будет задаваться уже первой и текущей ординатой, и так до тех пор, пока хотя бы одна из промежуточных ординат не выйдет за пределы коридора. Тогда текущая ордината начнет новый участок аппроксимации, а предыдущая вместе с параметром длительности будет передана на выход алгоритма сжатия.
Графическая интерпретация алгоритмов сжатия ЭПП и ИПП приведена на рис. 15. Абсолютная ошибка восстановления дискретного сигнала не превышает величины 
 Плавающая апертура может задаваться постоянной, постоянной со сдвигом или переменной, что во многом определяет сложность и эффективность конкретного алгоритма сжатия .
Плавающая апертура может задаваться постоянной, постоянной со сдвигом или переменной, что во многом определяет сложность и эффективность конкретного алгоритма сжатия .
Рис. 15. Экстраполяция (а) и интерполяция (б) сигнала алгебраическими полиномами первой степени
Из сравнительной оценки эффективности сжатия для алгоритмов ЭНП, ЭПП, ИПП следует, что при коэффициентах сжатия, не превышающих 10, наиболее эффективным является алгоритм ИПП, а при допустимых уровнях искажений не более 10% - ЭНП.
Рассмотренные алгоритмы сжатия используют однопараметрическую адаптацию по интервалу аппроксимации, поскольку последний автоматически определяется при поиске существенных отсчетов. Дальнейшее повышение эффективности сжатия сигнала может быть достигнуто за счет использования двухпараметрической адаптации, позволяющей автоматически определять как длительность интервала аппроксимации, так и степень аппроксимирующего полинома. При разработке алгоритмов анализа сигнала, основанных на структурных методах, использующих сегментацию сигнала, .изменение порядка аппроксимации на отдельных его отрезках может 'стать информативным .признаком распознавания элементов сигнала различной крутизны.
Дата добавления: 2020-06-09; просмотров: 407;
Поиск по сайту
Узнать еще
- Активные фильтры на ОУ
- Аномалии развития почек и верхних мочевых путей.
- Бинтовые повязки верхних и нижних конечностей.
- ВАРИКОЗНОЕ РАСШИРЕНИЕ ВЕН НИЖНИХ КОНЕЧНОСТЕЙ —
- ВЕРХНИХ ДЫХАТЕЛЬНЫХ ПУТЕЙ И ЛЕГКИХ У ВЗРОСЛЫХ
- Влияние сельскохозяйственного использования на ферментативную активность верхних горизонтов зональных типов почв
- Воздухоочистители и воздушные фильтры
- Волокнистые фильтры

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
