Исследование и оптимизация металлургических процессов на основе математических моделей
Как было показано при рассмотрении предыдущего вопроса, исследование и управление это лишь на первый взгляд различные, а в (действительности две неразрывные стороны одной и той же проблемы целенаправленного воздействия на объект, ориентированного на получение определенных заранее заданных результатов. Вопрос состоит лишь в том, что в зависимости от конкретных условий на первый план может выдвигаться одна из этих сторон.
Если объект хорошо изучен, ясен алгоритм управления им, то преобладающими становятся конкретные задачи управления, например, получение (определенных технологических или технико-экономических показателей: химического состава, прочностных свойств металлургической продукции и т. д.
В ряде же других случаев, когда уровень знаний о процессе недостаточен, неясны способы воздействия на него (т. е. алгоритмы управления), на первый план выдвигаются вопросы исследования объекта с целью более полного вскрытия его внутреннего механизма и разработки на этой основе рациональных способов управления.
Эти задачи решаются с помощью наиболее полных моделей исследовательского плана. В процессе таких исследований могут быть получены далеко идущие результаты, направленные, например, на коренное изменение технологии производства или конструкции агрегатов или даже на создание новых процессов и агрегатов. По существу это тоже своеобразное управление, но только более широкого плана. Общим же у этих двух сторон Проблемы является стремление вести исследование и управление оптимальным способом.
Управление даже сравнительно простыми объектами невозможно без их исследования, а рациональная организация исследования требует его постановки как задачи управления и последнее наиболее эффективно реализуется на основе подстраиваемой модели, что позволяет получать характеристики объекта компенсационным методом, сводя до минимума вмешательство в нормальное функционирование объекта и перенося большую часть экспериментов объекта на модель. В этом случае задача исследования логично ставится как задача оптимального управления, выражающаяся либо в получении модели заданной точности с минимальными затратами, либо в минимизации ошибки.
Постановка задачи и методы оптимизации
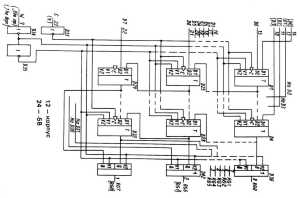
Постановку задачи оптимального управления проиллюстрируем схемой, представленной на рис. 7, которая является с одной стороны упрощением, с другой стороны обобщением схемы на рис. 6

Устройство управления УУ состоит здесь из модели объекта, воплощающей в себе формализованные на момент синтеза алгоритма априорные знания об объекте, и алгоритма управления или оптимизации А, для выбора которого используется более широкая, возможно даже концептуальная (мысленная) модель. Она же используется в определенной мере и при формировании цели Q, которая задается в основном вышестоящим звеном системы управления.
Ситуация, которая складывается в каждый момент в процессе управления характеризуется состоянием среды X состоянием объекта Y и целью управления. Путем выбор управляющих воздействий U можно изменять состояние объекта Y, модель которого имеется в нашем распоряжении.
 (13)
(13)
Строго говоря, состояние объекта определяется соотношением
 (14)
(14)
где E —вектор неконтролируемых возмущений, обусловленный неизмеряемыми входами, постепенным изменением характеристик объекта во времени, а в некоторых случаях также неточностью задания структуры модели.
Для простоты дальнейших рассуждений при постановке задачи будем считать, что Y= YМ, а ошибка модели εМ, зависящая в первую очередь от Е достаточно эффективно устраняется блоком адаптации модели или идентификатором (см. рис. 6).
Достижение цели управления Q* сводится к выполнению следующих целевых соотношений:
 (15)
(15)
Функции 
 и
и  , а также числа аi и сj, должны быть заданы на стадии формулировки целей управления и ограничений. Для дальнейшего анализа удобно записать эти соотношения в канонической векторной форме:
, а также числа аi и сj, должны быть заданы на стадии формулировки целей управления и ограничений. Для дальнейшего анализа удобно записать эти соотношения в канонической векторной форме:
 (16)
(16)
где G — функция ограничений типа равенств;
H — функция ограничений типа неравенств;
Q — функция качества.
Реализация условий (16) возможна путем соответствующего изменения состояния Y объекта за счет выбора определенного управления U, что приводит к следующей экстремальной задаче:
 (17)
(17)
где 
решение которой U* и является оптимальным управлением.
Ресурс, выделяемый на управление, выражается системой равенств и неравенств в области Ω. Для прогнозирования состояния объекта Y необходима его модель F [см. формулу (13)]. Следует заметить, что хотя задача в целом является экстремальной, однако первоочередным является выполнение ограничений Ω, а экстремальные цели Q достигаются лишь при условии выполнения неэкстремальных целей т. е. ограничений.
Например, при оптимизации управления каким-либо сталеплавильным процессом в первую очередь естественно, выполняются требования попадания в заданные ГОСТом пределы по химическому составу и температуре, ограничения на сырьевые ресурсы и лишь при выполнении этих условий решается задача минимизации затрат или себестоимости продукции.
Рассмотренную выше задачу (17) целесообразно представить в следующем виде:
 (18)
(18)
где
В зависимости от вида модели F, т. е. от того, является ли F функцией или оператором, получают различные задачи, которые решаются различными методами.
Задача синтеза управления статическим объектом, для которого модель F является функцией, заключается в минимизации векторной функции Q (X, U) путем изменения q управлений u1..., uq, удовлетворяющих ограничениям Ω, наложенным на U. Состояние среды X (значения измеряемых, но неуправляемых входов) при этом должно быть известным.
Примером такой задачи может служить планирование производства. Здесь U — производственный план; X — поставка сырья; G — требования к номенклатуре продукции, соблюдению норм безопасности и т. д.; Н — требования к качеству продукции, производственные нормативы и ограничения. В качестве экстремальных целей могут служить производительность труда, себестоимость продукции и т. д. Это наиболее характерный пример задачи математического программирования, отличающейся тем, что исходное управление представляет собой набор параметров u1..., uq, a Q, G и H являются векторными функциями управления U. Если функции Q, G и Н линейны, то имеет место широко распространенная и теоретически хорошо разработанная задача линейного программирования, применяющаяся прежде всего для решения вопросов планирования и управления производством в условиях ограниченных ресурсов.
Рассмотрим теперь динамический объект, для которого F — оператор. Тогда управление U представляет собой векторную функцию времени U(t), a Q, G и Н являются функционалами. При этом задача (18) становится вариационной.
Пример. Необходимо получить заданное содержание углерода в конвертере за минимальное время. При этом максимально упростим постановку задачи. Допустим, что изменение содержания углерода в конвертерной ванне, начиная с момента заливки чугуна, описывается дифференциальным уравнением следующего вида:
 (19)
(19)
где y1(t) — содержание углерода в ванне; u1(t) и u2(t) — управляющее воздействие соответственно интенсивностью продувки и положением фурмы; x1(t) — воздействие среды, например степень чистоты продувочного кислорода или его давление.
Для решения поставленной задачи необходимо минимизировать функционал Q (t) = Q[u1(t), u2(t), x1(t)] в условиях наложения целого ряда ограничений на управления.
Более конкретно задача представляется в следующем виде:
 (20)
(20)
 (21)
(21)
Здесь выражение (20) — целевая функция, подлежащая минимизации, а выражение (21) — система ограничений.
Первое соотношение этой системы накладывает ограничения на интенсивность продувки кислородом,
второе – на скорость обезуглероживания в связи с пропускной способностью газоотводящего тракта.
Третье уравнение представляет собой модель обезуглероживания,
четвертое – граничные условия (содержание углерода в начале и конце продувки).
Соотношение пятое накладывает ограничение на скорость обезуглероживания в связи со скоростью нагрева,
шестое представляет собой модель нагрева, где скорость нагрева y2(t) описывается как зависимость от скорости обезуглероживания  , положения фурмы u2(t) и потерь тепла в окружающую среду х2(t).
, положения фурмы u2(t) и потерь тепла в окружающую среду х2(t).
Седьмое соотношение накладывает ограничение на положение фурмы в связи с возможностью переокисления шлака и выбросов из конвертера при слишком высоком положении фурмы а6 и опасностью преждевременного выхода ее из строя при слишком низком положении a5.
Естественно, в связи со сложностью процесса не учтен еще целый ряд ограничений, но для понимания задачи достаточно и такой ее постановки. Количественное решение этой задачи представляет значительные трудности как методического, так и вычислительного характера, поэтому ограничимся лишь упрощенным качественным ее анализом.
На рис. 7, б показан график изменения интенсивности продувки по ходу конвертерной плавки и траектория изменения скорости обезуглероживания. Здесь можно видеть, что на первом участке 0 —t1 поддерживается максимальная интенсивность продувки, допускаемая ограничением а2. В этот период наряду с углеродом окисляются также кремний и марганец. Распределение затрат кислорода на окисление этих элементов учитывается в уравнении (19) коэффициентом b1 и являющимся функцией их концентраций. Причем содержание двух последних элементов, имеющих большее сродство к кислороду, чем углерод, к концу первого периода доходит практически до следов. В связи с этим практически весь вдуваемый кислород начинает расходоваться на реакцию обезуглероживания, протекающую с большим выделением СО. При этом начинает действовать ограничение а3, связанное с пропускной способностью газоотводящего тракта. Поэтому на втором участке t1 — t2 скорость обезуглероживания за счет выбора соответствующего значения u1(t) поддерживается на максимально возможном уровне с учетом ограничения аз. С момента t2 наряду с окислением углерода начинает заметно сказываться накопление кислорода в металле и шлаке, что приводит к повышению содержания оксидов железа в шлаке.
В уравнении (19) это отражается через возрастание второго члена в левой части. Значительную роль в этот период начинает играть ограничение по синхронизации процессов обезуглероживания и нагрева, которое в свою очередь связано с ограничением на оскисленность шлака.
Варьируя управляющими воздействиями u1(t) и u2(t), можно свести к минимуму продолжительность продувки, т. е. функционал Q (t).
Таким образом, оптимальное управление динамическим объектом требует решения вариационной задачи, в которой искомые уравнения представляют собой функции времени, a Q, G и H являются заданными функционалами управления U (t), Аналитически задача эта решается довольно сложно, чаще всего ее стараются свести к задаче математического программирования.
Имеются хорошо разработанные теоретически методы решения этой задачи, однако при их практической реализации чаще всего возникают определенные трудности. Наиболее известными из этих методов являются принцип максимума Понтрягина и динамическое программирование.
Принцип максимума применяется для динамических объектов, модель которых может быть представлена в виде системы обыкновенных дифференциальных уравнений
 (22)
(22)
с заданными начальными условиями при t = 0,  и скалярным управлением. В векторной форме эта система записывается следующим образом:
и скалярным управлением. В векторной форме эта система записывается следующим образом:
где Y(t) – вектор состояний объекта;
F — вектор заданных функций, определяющих модель объекта.
Задача ставится следующим образом: необходимо перевести объект из состояния Y0 в заданное состояние Y*, Причем траектория Y(t) и управление u(t) должны удовлетворять заданным ограничениям и экстремальной цели — минимуму заданного функционала
 (23)
(23)
где f0 (Y(t), u(t)) – заданная функция.
В качестве такого функционала выбирают обычно траты на управление. При f0(·) = 1 получаем Q = T, т.е. время перехода из состояния Y0 в Y*. Принцип максимума позволяет свести эту задачу к задаче максимизации так называемой функции Гамильтона, приводящей из состояния Y0 в какое-то промежуточное (текущее) состояние Y(Т). Это так называемый цикл быстрой оптимизации. Затем решается задача попадания в заданную точку Y* Путем выбора соответствующих начальных условий С(с1 сm), для чего минимизируется следующая невязка
 (24)
(24)
Эту задачу решают поисковыми методами (цикл медленной оптимизации), которые требуют больших затрат машинного времени, причем очень резко возрастающих в зависимости от размерности объекта т, что ограничивает применимость этого метода.
Метод динамического программирования применяется обычно для многоэкстремальных вариационных задач, требующих в принципе для своего решения организации полного перебора. Он позволяет ввести определенную целенаправленность и таким образом значительно сократить полный перебор всех допустимых вариантов управления. В основе этого метода лежит предположение о выполнимости так называемого «принципа оптимальности», заключающегося в том, что оптимальное поведение объекта и дальнейшее управление зависит только от его исходного состояния и не зависит от предыстории попадания в это состояние. Для применимости рассматриваемого метода необходимо иметь модель объекта управления, позволяющую достаточно удовлетворительно предсказывать будущее поведение объекта при определенном управлении.
Общая постановка задачи и вид функционала качества аналогичны предыдущему методу. Идея решения задачи представляется следующим образом. Прежде всего задача дискретизируется, что позволяет рассматривать управление для каждого определенного интервала времени:
 (25)
(25)
Далее для простоты остановимся на случае равноотстоящих единичных интервалов времени, т. е. Δt = l. Решение ищется, начиная с конца процесса (t = T), поскольку, исходя из принципа оптимальности, оптимальное решение, полученное на каком-то отрезке [t1, T], будет «куском» решения исходной задачи на отрезке. [0, Т]. На последнем (N—1)-м шаге решается задача попадания в конечную точку состояния yN = y*, т. е. определяется корень уравнения

На этом шаге не до оптимизации, так как нужно удовлетворить граничному условию уN = у* любой ценой, которая зависит от yN-1 и равна

где f0 — функция затрат.
Далее, двигаясь от конца (t=T) к началу (t = 0), рассматривается следующий (N — 2)-й шаг (предпоследний), который, как и все предыдущие, делается из пока неизвестного состояния yN-1. Приращение минимизируемого критерия на этом шаге равно f0(yn-2, un-2).
В соответствии с принципом оптимальности необходимо минимизировать сумму затрат на этом и последующем шаге, т. е.

где 
Из этих соотношений находится зависимость оптимальных управлений  для данного шага от неизвестных значений yN-2 и минимальное значение затрат на двух последних (в общем случае на всех последних) шагах
для данного шага от неизвестных значений yN-2 и минимальное значение затрат на двух последних (в общем случае на всех последних) шагах

Таким образом, двигаясь с конца к началу, предварительно определяют следующие необходимые для дальнейших расчетов функции
 (26)
(26)
Которые характеризуют минимальные затраты при движении из исходного состояния у0 в конечное у* и зависимость оптимального управления каждого шага от его начальных условий.
Далее синтез оптимального управления идет с начального до конечного состояния. Оптимальное управление на первом шаге определяется из условия  , а точка оптимальной траектории на первом шаге
, а точка оптимальной траектории на первом шаге  .
.
Затем, используя полученные выше функции (26) имеем
 и т.д. до
и т.д. до  .
.
В результате определяется оптимальное управление  и соответствующая ему оптимальная траектория
и соответствующая ему оптимальная траектория 
Метод динамического программирования позволяет достаточно просто учитывать не только ограничения на управления, но и ограничения, накладываемые на оптимальную траекторию, дает возможность находить глобальный минимум при решении многоэкстремальных задач. Однако применимость этого метода ограничивается задачами управления объектами размерности не более 2—3 (по количеству управляющих воздействий), так как объем необходимой памяти за счет многомерности таблиц функций (26) увеличивается почти на порядок для каждой единицы размерности. В связи с этим теоретические представления обычно используются для правильной постановки задач оптимизации, решение же их чаще всего осуществляется поисковыми методами.
Интересные возможности для реализации как аналитических, так и поисковых методов оптимизации открываются при использовании гибридных ЭВМ, сочетающих преимущества аналоговых и цифровых ЭВМ. Особенно перспективным это становится для современных ЭВМ.
Рассмотрим принцип решения динамической задачи нелинейного программирования, относящейся к классу сложнейших оптимизационных задач, требующих длительных расчетов даже на быстродействующих ЭВМ. Постановка этой задачи имеет следующий вид:


………………………….

………………………….

…………………………..
с заданными начальными условиями

 ,
,
где x1, ..., хn — варьируемые переменные, например управления;
 — заданная функция многих переменных (функция качества), для которой необходимо найти минимум или максимум;
— заданная функция многих переменных (функция качества), для которой необходимо найти минимум или максимум;
 — заданные нелинейные функции, образующие систему конечных уравнений;
— заданные нелинейные функции, образующие систему конечных уравнений;
 — заданные функции, образующие систему неравенств;
— заданные функции, образующие систему неравенств;
 ,
,  — границы неравенств;
— границы неравенств;
 — заданные функции, входящие в систему обыкновенных дифференциальных уравнений;
— заданные функции, входящие в систему обыкновенных дифференциальных уравнений;
n — число варьируемых переменных;
m — число конечных уравнений;
q—число неравенств;
r — порядок системы обыкновенных дифференциальных уравнений.
Решение поставленной задачи основано на методе координатного поиска, алгоритм которого состоит из следующих операций: определение минимума функции в заданном направлении, выработка команды перехода на новое направление, формирование направления поиска, формирование траектории поиска. Операции алгоритма выполняются в следующей последовательности. Вырабатывается команда формирования первого направления поиска и формируется движение в этом направлении. Координаты движущейся точки используются для вычисления штрафной функции как функции времени. При движении по заданному направлению минимизируемая функция изменяется во времени. Убыванию этой функции соответствует отрицательная производная, возрастанию — положительная производная по времени, а экстремуму функции — ее нулевое значение. В момент обращения производной в нуль вырабатывается команда перехода на новое направление поиска. Таким образом, в этой части алгоритма используется классический принцип определения экстремумов, что оказывается возможным благодаря чрезвычайно большому быстродействию аналоговой части, позволяющей параллельно решать все уравнения и неравенства, приведенные в постановке задачи. Цифровая часть используется главным образом для формирования логики изменения направлений поиска.
Траектория движения в минимум штрафной функции, в которую входят минимизируемые функции, является ломаной линией с прямолинейными участками. Поиск решения представляется в виде развернутого во времени процесса на экране электронно-лучевого индикатора, что делает весьма наглядным и физичным постановку и решение задачи. Затраты машинного времени на гибридной ЭВМ. несоизмеримо малы по сравнению с цифровой ЭВМ.
Остановимся в заключение этого подраздела на поисковых методах, входящих в той или иной форме в большинство алгоритмов оптимизации (минимизации ошибки модели; методы Гаусса — Зайделя (поочередное варьирование переменных); метод крутого восхождения).
Широкое распространение получил так называемый симплексный метод поиска, который хотя и не позволяет получить математического описания исследуемой поверхности, но требует для своей реализации еще меньшего числа опытов, чем предыдущий, и сравнительно легко поддается алгоритмизации для ЭЦВМ. Еще одним достоинством этого метода является его приспособляемость к свойствам поверхности (метод деформируемого многогранника).
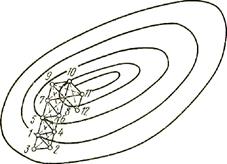
Рассмотрим основную идею симплексного метода оптимизации. Симплексом называется регулярный многогранник, имеющий n+1 вершину при n переменных. Например, для случая двух переменных регулярный симплекс представляет собой равносторонний треугольник, для трех переменных— тетраэдр и т. д.
При поиске минимума целевой функции пробные опыты (векторы) выбираются в точках, находящихся в вершинах симплекса (точки 1—3 на рис. 8).
|

 |
Рис. 8. Оптимизация с использованием метода
Далее из вершины, где целевая функция максимальна (точка 3) проводится проектирующая прямая через центр тяжести симплекса, точка 3 исключается и строится новый симплекс, называемый отраженным, из оставшихся прежних точек 1, 2 и одной новой точки 4, расположенной на проектирующей прямой. Аналогичным способом строится следующий симплекс и так до тех пор, пока он не начнет вращаться вокруг области экстремума, где размеры симплекса приходится уменьшать.
Некоторые трудности, возникающие при использовании регулярных симплексов, особенно отсутствие ускорения поиска и сложности его проведения на искривленных «оврагах» и «хребтах», привели к необходимости совершенствования этих процедур. Так, например, Нелдером и Мидом предложен метод, в котором симплекс может изменять свою форму (деформироваться) и таким образом по существу уже не будет оставаться симплексом. Этот так называемый метод деформируемого многогранника.
Начальный многогранник здесь выбирается обычно в виде регулярного симплекса (хотя это не обязательно). Процедура отыскания вершины, в которой целевая функция имеет лучшее значение, состоит из следующих операций: отражения (как и в предыдущем методе), растяжения, сжатия, редукции (уменьшение всех граней в 2 раза), c помощью трех последних операций деформируемый многогранник адаптируется к топологии целевой функции, вытягиваясь вдоль длинных наклонных плоскостей, изменяя направление в изогнутых впадинах и сжимаясь в окрестности минимума. Имеются прикладные программы для реализации этого метода на ЭВМ.
Исследование модели, а точнее исследование объекта с помощью модели, является одним из важнейших этапов процесса математического моделирования. Машинные эксперименты на математических моделях, в противоположность экспериментам на реальных объектах, позволяют наряду с сокращением дорогостоящих и трудноорганизуемых промышленных опытов, сопровождающихся обычно нарушениями технологии и потерями производства, получить в ряде случаев интересные результаты, не достижимые при промышленных экспериментах, поскольку на моделях могут быть воспроизведены предельные, критические и другие особые режимы, реализация которых в производственных условиях представляет большие трудности. Кроме того возможности перебора вариантов и пробных воздействий на моделях практически не ограничены.
Любое исследование в принципе должно быть целенаправленным, поэтому при его организации необходимо пользоваться постановкой задачи оптимального управления и методами оптимизации. Организация управляемого исследовательского процесса может представляться либо как задача полной автоматизации эксперимента путем реализации рассмотренных выше алгоритмов, либо как задача диалогового взаимодействия исследователя и ЭВМ.
Дата добавления: 2017-04-05; просмотров: 997;
Поиск по сайту
Узнать еще
- I. Эмпирическое исследование
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- III. Исследование движений
- IX. Исследование речи
- V. Исследование зрительного и зрительно-пространственного гнозиса
- VII. Педагогические технологии на основе дидактического усовершенствования и реконструирования материала
- XI. Исследование чтения
- XIII. Исследование системы счета
Публикации по технике и механике
Публикации по биологии
Публикации по информатике
Публикации по строительству
Публикации по физике
Публикации по химии
Публикации по электронике

Публикации по искусству
Публикации по истории
Публикации по медицине
