Кинематический анализ механизмов с использованием аналитических методов.
Аналитическое решение задачи о положениях звеньев
механизма может быть реализовано либо методом преобразования
координат (Ю.Ф. Морошкина), либо методом замкнутого векторного
контура (В.А. Зиновьева).
Метод преобразования координат.
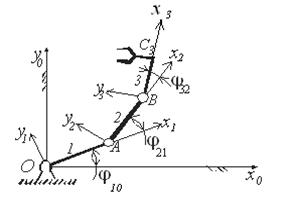
Проиллюстрируем на примере определения положения звеньев плоского механизма манипулятора, полученного из незамкнутой кинематической цепи (рис. 2.4).
Попутно заметим, что этот метод позволяет для любых механизмов сравнительно просто автоматизировать процесс вычислений средствами ЭВМ при использовании стандартных программ преобразования координат звеньев, образующих наиболее распространённые кинематические пары.
Число степеней подвижности манипулятора W=3n-2p5-p4=3·3-2·3=3.
Известными являются длины звеньев l1 и l2 и координаты произвольно выбранной точки C3(xc3,yc3) в подвижной системе координат x3By3, связанной
со звеном 3, а также углы  , где t—время. В индексах первым указан номер звена, к которому относится угол поворота,
, где t—время. В индексах первым указан номер звена, к которому относится угол поворота,
вторым — номер звена, от которого угол поворота отсчитывается.
|
|
Решение системы шести линейных уравнений с шестью неизвестными
позволяет найти координаты точки С3 в неподвижной системе
координат  .
.
Метод замкнутого векторного контурапроиллюстрируем на примере определения кинематических характеристик механизма шарнирного четырёхзвенника (рис. 2.5).
|
 и
и  выходят из неподвижных точек. Направления векторов
выходят из неподвижных точек. Направления векторов  и
и  могут быть заданы произвольно.
могут быть заданы произвольно.
|
Условие замкнутости кинематической цепи можно записать либо в векторной форме, либо в виде уравнений проекций. В рассматриваемом случае векторное уравнение имеет вид
 . (2.1)
. (2.1)
Этому уравнению соответствуют два уравнения проекций на оси координат
 (2.2)
(2.2)
Таким образом, система уравнений (2.2) связывает три переменные величины  , вследствие чего рассматриваемая кинематическая цепь имеет одну степень свободы и, следовательно, одну обобщённую координату.
, вследствие чего рассматриваемая кинематическая цепь имеет одну степень свободы и, следовательно, одну обобщённую координату.
Решив задачу о положениях механизма, перейдём к задачам об определении скоростей и ускорений. Для этого продифференцируем уравнение (2.2) по 
 (1.3)
(1.3)
Так как  - аналог угловой скорости
- аналог угловой скорости  звена 2 и
звена 2 и  - аналог угловой скорости
- аналог угловой скорости  звена 3, то
звена 3, то
 (1.4)
(1.4)
U21, U31 являются передаточными отношениями
 .
.
Из углов и  первого уравнения системы (1.4) вычитаем общий угол
первого уравнения системы (1.4) вычитаем общий угол  ,
,
что соответствует повороту осей координат xOy на общий угол

отсюда 
Аналогично поворотом осей на угол получим из второго уравнения
системы (1.4)
Для определения ускорений продифференцируем уравнения (1.4) по
 (1.5)
(1.5)
Здесь  - аналоги угловых ускорений.
- аналоги угловых ускорений.
 ,
,
 .
.
Здесь  и
и  - соответственно заданные угловая скорость и угловое ускорение звена 1.
- соответственно заданные угловая скорость и угловое ускорение звена 1.
2.5. Кинематический анализ механизмов с использованием
графических методов.
При отыскании положений механизма графическим методом его кинематическая схема вычерчивается в выбранном масштабе КL , в каком-либо положении начального звена.
Масштаб длин (точнее масштабный коэффициент): 
Например, М 1:5 соответствует КL=0,005 м/мм. Это значит, что 1мм на схеме соответствует 0,005 м натуральной величины.
Построение кинематических схем механизмов методом засечек, который выполняется с помощью элементарных геометрических операций.
Пример: Требуется построить план шарнирного четырёхзвенника, если заданы lOA, lAB, lBC, lOC, ω = const.
Планом механизманазывается графическое изображение взаимного положения звеньев, соответствующее выбранному моменту времени. Ряд следующих друг за другом планов позволяет наглядно проследить за движением звеньев и перемещением точек по траекториям.
Решение: Сначала показываем на чертеже положение неподвижных элементов кинематических пар: точек О и С.
Затем в заданном положении изображаем начальное звено. Радиусом lОА вычерчиваем окружность, по которой перемещается точка А. Окружность может быть разделена на любое число равных или неравных частей. При равномерном вращении начального звена целесообразно разделить окружность на равные части, чаще всего на 8 или 12. Каждое положение точки А обозначается определённым номером, который в дальнейшем присваивают плану всего механизма. За нулевое положение предпочтительно принять то, при котором кривошип А0О и шатун А0В0 будут лежать на одной, прямой. Это обеспечит крайнее (в нашем случае левое) положение коромысла B0С (ведомого звена).
После этого определяем остальные положения звеньев структурной группы АВ-ВС, в частности точки Bi, делая засечки радиусом АВ из каждой точки Ai на траектории точки В. Соединив точки О, Ai, Bi, и С, получим i-ый план механизма.
На рис. 2.3 представлена схема построения двенадцати планов кривошипно-ползунного механизма, из которых выделено три, и траектория точки S.
| |||
| |||
Дата добавления: 2016-10-07; просмотров: 1053;
Поиск по сайту
Узнать еще
- Case-study (анализ конкретных ситуаций, ситуационный анализ)
- II Расчет и анализ трехфазных цепей
- II. Качественный контроль (социологический анализ).
- II. Судовождение с использованием лоцманского метода и графического счисления пути судна.
- III и IV нейроны слухового пути. Третьи и четвертые нейроны слухового проводящего пути. Ядра слухового анализатора. Признаки поражения слухового пути.
- VII. Анализ характера
- І. Анализаторы І сигнальной системы
- ІІ. Анализаторы ІІ сигнальной системы
Публикации по технике и механике
Публикации по биологии
Публикации по информатике
Публикации по строительству
Публикации по физике
Публикации по химии
Публикации по электронике

Публикации по искусству
Публикации по истории