Универсальный цифровой регулятор на основе микро-ЭВМ
При испытаниях на прочность авиационных конструкций широко применяются многоканальные системы управления нагружением. Однако сложность объекта управления, значительная масса, а также отсутствие описания (передаточных функций)затрудняют достижение достаточно оптимальных и устойчивых параметров системы.
Многоканальные системы управления нагружением сложной механической конструкции и другими технологическими процессами с распределенными параметрами, близкими к оптимальным, и высокой стабильностью можно построить по принципу децентрализованной структуры: при этом под контролем главной ЭВМ (обычно мини-ЭВМ) работают несколько десятков цифровых регуляторов, выполненных на основе микро-ЭВМ.
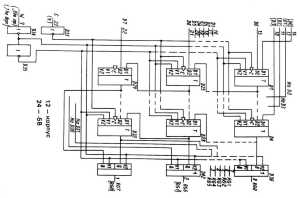
Аппаратно-программная реализация цифрового регулятора (рис. 1) позволяет получить унифицированные устройства, обладающие следующими качествами:
- большим набором законов управления; простотой сопряжения с вычислительными машинами верхнего уровня в иерархических системах управления;

Рис. 1. Цифровой регулятор
- возможностью автоматического изменения режимов работы и установки коэффициентов по командам ЭВМ верхнего уровня;
- возможностью использования без дополнительных цифро-аналоговых преобразователей; простотой и высокой точностью задания переменных коэффициентов настройки;
- повышенной стабильностью временных характеристик; высокой точностью обработки информации;
- сочетанием малой стоимости стандартного изделия серийного производства с ориентированностью заказанного устройства.
Такие качества цифровых регуляторов, реализованных на базе микро-ЭВМ, заставляют серьезно пересмотреть способы создания систем автоматического управления технологическими процессами и во многих случаях отказаться от их аппаратной реализации по функциональным Признакам, которые положены в основу формирования агрегатных комплексов в приборостроении.
Разработанная программа управления и контроля, укрупненная блок-схема которой показана на рис. 2, заносится в ПЗУ микро-ЭВМ "Электроника С5-11". Программа включает в себя блоки, подготовки работы и собственно регулятор (рис. 3), контур регулирования полностью реализован программным методом.
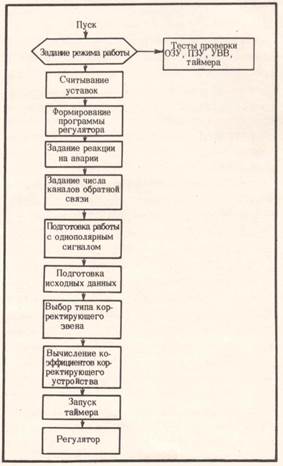
Рис. 2. Блок-схема программы управления и контроля
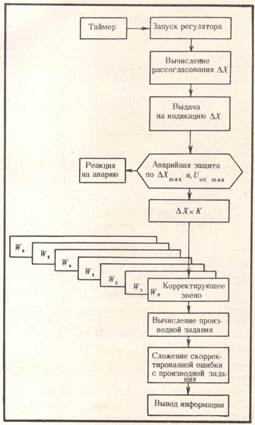
Рис. 3. Блок-схема регулятора
Формирование управляющего воздействия происходит по закону


Широкий набор программно реализованных корректирующих звеньев позволяет использовать цифровой регулятор для управления самыми разнообразными объектами. Благодаря большому диапазону изменения коэффициентов настроек область применения цифрового регулятора может быть расширена. Этих качеств лишены цифровые электрогидравлические следящие приводы станков с программным управлением [1].
Программы представления корректирующих звеньев реализуют шесть наиболее распространенных законов регулирования [2]:
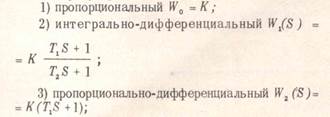
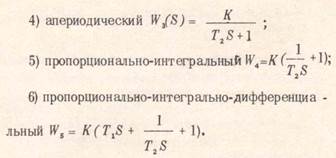
Кроме того, предусмотрена возможность переключения типа корректирующего звена с пропорционального на пропорционально-интегрально дифференциальное и обратно по внешнему сигналу в процессе работы без остановки машины. Эта часть программы оформлена отдельным блоком и называется переменной структурой:

Для улучшения динамики системы регулирования в управляющий сигнал вводится составляющая, пропорциональная производной задающего воздействия. Она позволяет скомпенсировать инерционность объекта в первом приближении. Предварительные исследования показ али, что для рассматриваемого класса объектов и низких частот входного сигнала (до 100 Гц) вводить составляющую по второй производной нецелесообразно.
В целях достижения наибольшей эффективности и минимума затрат цифровые корректирующие фильтры реализованы программным способом с учетом обеспечения наименьшего времени счета.
Программа предусматривает прием задающего воздействия как в цифровой, так и в аналоговой форме. В первом случае регулятор может иметь до трех обратных связей, во втором - две. Число каналов обратной связи N задается определенным кодом в служебном слове. Предусмотрена возможность работы регулятора с однополярными и разнополярными сигналами с сохранением точности приема и обработки информации. В программе реализован блок аварийной защиты по перегрузке и рассогласованию.
В каждом цикле работы системы сигналы главной обратной связи (регулируемые параметры) и рассогласования сравниваются с пороговыми максимально допустимыми значениями, которые за - даются перед началом работы системы и могут изменяться в широких пределах. Если хотя бы один сигнал выходит за пределы допустимого, реализуется один из четырех режимов:
- продолжение вычисления (аварийная защита отключена);
- фиксация заданного положения с остановом системы (на выход подается нулевое управляющее воздействие, машина останавливается);
- фиксация заданного положения без останова системы (на выход подается нулевое управляющее воздействие, машина продолжает счет);
- отработка нулевого задающего воздействия, после чего машина останавливается.
Перед началом работы блоков реакции на аварию на выход системы подается сигнал о наличии аварийной ситуации и указывается, какой параметр превысил заданный уровень.
Регулятор запускается от таймера, который позволяет стабилизировать период квантования сигналов по времени и увеличить точность вычисления производных.
Необходимый код для задания выходной частоты работы таймера вычисляется исходя из заданного периода квантования ТО и устанавливается в регистрах (Рг) таймера автоматически.
В системе предусмотрена тестовая проверка работоспособности узлов микро-ЭВМ "Электроника С5-11": оперативного запоминающего устройства, постоянного запоминающего устройства, устройства ввода-вывода и таймера. Неисправность проверяемых блоков индицируется на лицевой панели устройства.
Для обеспечения минимального времени обработки информации при получении заданной точности организован однобайтовый обмен. Вычисления производятся с 16-разрядными числами, что позволяет значительно повысить их точность. Структурная схема регулятора показана на рис. 4. Для ввода сигналов обратной связи в ЭВМ служит трехканальный 8-разрядный аналого-цифровой преобразователь (АЦП).
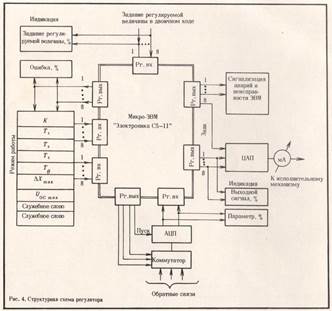
Микро-ЭВМ осуществляет управление коммутатором и запуск АЦП. Выходной сигнал регулятора в виде одного знакового и восьми значащих разрядов из ЭВМ поступает в цифроаналоговый преобразователь (ЦАП) с широтно-импульсной модуляцией. Такой тип ЦАП позволяет получать достаточно мощный выходной сигнал без дополнительных усилительных устройств.
Помимо устройств связи с объектом в состав регулятора входят цифровые индикаторы задания, регулируемого параметра, величины рассогласования (ошибки) и выходного сигнала, а также сигнализаторы аварии и неисправности ЭВМ. Задание режимов работы и коэффициенты настроек регулятора устанавливаются на наборном поле, состоящем из девяти 8-разрядных слов.
В процессе эксплуатации цифрового регулятора было получено удовлетворительное качество регулирования при отработке задающего воздействия с частотой до 2 Гц.
Дата добавления: 2024-01-23; просмотров: 143;
Поиск по сайту
Узнать еще
- Агрегатный комплекс средств телемеханической техники с программируемыми устройствами на основе микро-ЭВМ
- Архитектура ряда микро-ЭВМ "Электроника НЦ"
- Бетонные стройматериалы на основе отходов деревопереработки и другого местного сырья
- Генератор кодовых последовательностей с применением микро-ЭВМ «электроника с5-11»
- Комплексная система стандартизации и унификации микропроцессоров и микро-ЭВМ
- Кросс-средства разработки и отладки программ для микро-ЭВМ
- Основы цифровой техники. Основные законы алгебры логики
- Применение микро-ЭВМ «электроника С5-11» в системе контроля коммутационного узла связи
Публикации по технике и механике
Публикации по биологии
Публикации по информатике
Публикации по строительству
Публикации по физике
Публикации по химии
Публикации по электронике

Публикации по искусству
Публикации по истории