Матрица поворота вокруг произвольной оси
В ряде случаев подвижная система координат OUVW может совершать поворот на угол j относительно произвольной оси r, представляющей собой единичный вектор с компонентами rx, ry и rz, выходящие из начала координат О. Это применяется тогда, когда нужно упростить последовательность поворотов относительно основных осей систем координат OXYZ и/или OUVW. Их можно заменить одним поворотом системы OUVW вокруг оси r (рис. 3.1).
Чтобы получить матрицу поворотаRr,j , можно сначала произвести ряд поворотов относительно осей системы OXYZ, чтобы совместить ось r с осью OZ. Затем произвести требуемый поворот вокруг оси r на угол j и опять ряд поворотов относительно системы OXYZ, возвращающих ось OZ в исходное положение.
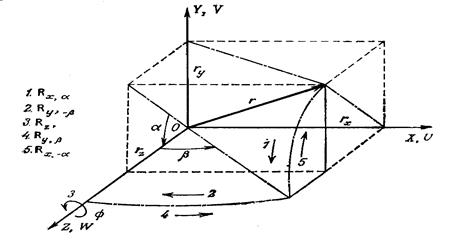
Рисунок 3.1. Вращение вокруг произвольной оси
Из рис. 3.1 видно, что совмещение осей OZ и rможет быть реализовано с помощью поворота на угол a относительно оси OX, тогда ось rв результате окажется в плоскости XZ, а затем на угол -b, вокруг оси OY, тогда в результате оси OZ и r совпадут. После поворота на угол j относительно OZ или r проведём прежнюю операцию в обратном порядке с обратными знаками. Результирующая матрица поворота равна:
R r,j = R x,-a ×R y,b ×Rz,j ×R y,-b ×R x,a =

Из этого легко определить, что:
sina =  ; cosa =
; cosa =  ; sinb = rx; cosb =
; sinb = rx; cosb =  .
.
Подстановка этих равенств в предыдущее выражение дает:
 , (3-1)
, (3-1)
где Vj = vers j= 1– cosj.
Это очень полезная матрица поворота.
Дата добавления: 2021-11-16; просмотров: 454;
Поиск по сайту
Узнать еще
- B). Система относительных координат.
- SWOT-матрица торговой фирмы
- V – скоросить буксировки, м/с.
- VI. Доступность и посильность в обучении.
- Інституціональні аспекти участі національної економіки у міжнародних валютно-фінансових відносинах та формування безпеки національної економіки
- Історія сучасних взаємовідносин людини й природного середовища. Екологія і практична діяльність людини. Життєвий простір. Екологічні основи раціонального природокористування.
- А - глубиной до 5 м на снегозаносимых участках; б - глубиной до 12 м с безоткосными полками
- Абсолютная и относительная влажность воздуха.
Публикации по технике и механике
Публикации по биологии
Публикации по информатике
Публикации по строительству
Публикации по физике
Публикации по химии
Публикации по электронике

Публикации по искусству
Публикации по истории