Трехточечные методы наведения
Известны две следующие разновидности метода трехточечного наведения:
- наведение методом совмещения (накрытия цели);
- наведение с упреждением.
При наведении методом совмещения система управления должна работать таким образом, чтобы снаряд в течение процесса наведения удерживался на прямой линии, соединяющей в пространстве пункт управления и цель (рисунок 3.4). Практически это означает, что система управления должна обеспечивать сведение к нулю угла Δ.
Подобный метод наведения применяется как в случаях управления с неподвижного, так и с движущегося пункта управления для наведения на движущиеся и неподвижные цели.
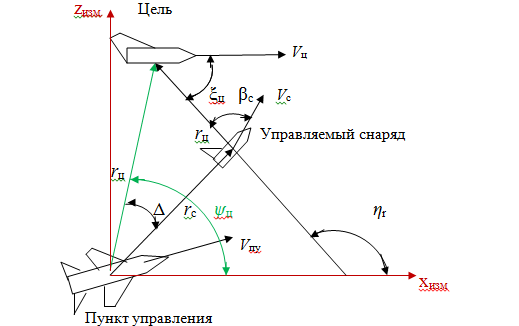
Рисунок 3.4 – Геометрические соотношения при 3-х точечном наведении
Форма траектории полета снаряда при наведении методом совмещения зависит от соотношения между скоростями цели, снаряда и пункта управления. Аналитическое исследование этой траектории достаточно сложная задача.
Если пункт управления (ПУ) неподвижен, то для обозначений рисунка 3.4 справедлива формула
 . (3.11)
. (3.11)
Для оценки необходимой величины ускорения  , которое требуется от снаряда для наведения с неподвижного ПУ на маневрирующую воздушную цель, может быть использовано приближенное неравенство
, которое требуется от снаряда для наведения с неподвижного ПУ на маневрирующую воздушную цель, может быть использовано приближенное неравенство
 , (3.12)
, (3.12)
где
 - ускорение, требуемое от снаряда при наведении на прямолинейно и равномерно движущуюся цель;
- ускорение, требуемое от снаряда при наведении на прямолинейно и равномерно движущуюся цель;
 и
и  - соответственно поперечное и касательное ускорения, развиваемые маневрирующей целью.
- соответственно поперечное и касательное ускорения, развиваемые маневрирующей целью.
Использованное в выражении (3.12) значение необходимого поперечного ускорения при прямолинейном и равномерном движении цели определяется следующими формулами:
при 
 ; (3.13)
; (3.13)
при  ;
;  ;
;
где D – наклонная дальность, измеренная по перпендикуляру от пункта управления до траектории полета цели (наклонный параметр цели).
В случае наведения на такую цель, как самолет, для ориентировочной оценки необходимых ускорений принимают
 и
и  . (3.14)
. (3.14)
В этом случае выражение (3.12) преобразуется к более простому виду
 . (3.15)
. (3.15)
При наведении методом совмещения с целью нет принципиальной необходимости в определении дальностей до цели или до снаряда. Это обстоятельство является преимуществом метода.
На рисунке 3.5 приведен способ графического построения траекторий наведения в вертикальной плоскости для частного случая, когда управление осуществляется с неподвижного ПУ. Для простоты будем считать, что момент начала управления совпадает с моментом старта снаряда.
При построении, задаваясь определенным интервалом времени Δt, отметим точки положения цели в моменты времени  (n= 1,2,3,…). Положим, что снаряд движется с постоянным ускорением. Тогда, зная закон изменения скорости во времени, можно построить зависимость пройденного снарядом пути
(n= 1,2,3,…). Положим, что снаряд движется с постоянным ускорением. Тогда, зная закон изменения скорости во времени, можно построить зависимость пройденного снарядом пути  от времени t (рисунок 3.5,б) [2].
от времени t (рисунок 3.5,б) [2].
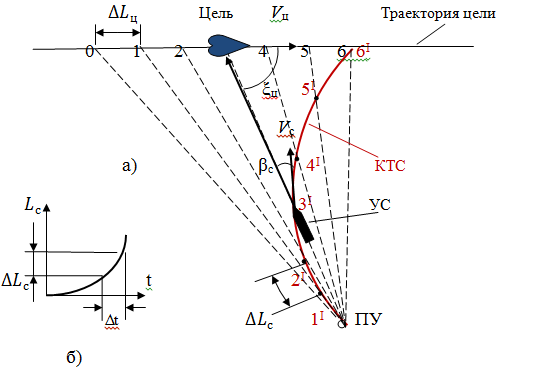
Рисунок 3.5 – К определению траектории полета снаряда
при наведении методом совмещения с целью
а – траектория снаряда
б – зависимость пройденного снарядом пути от времени
Учет этой зависимости позволяет установить интервалы пути  , которые пролетает снаряд за интервалы времени Δt. Зная интервалы , находим точки, определяющие положение снаряда через интервалы времени Δt на прямых линиях ПУ- цель. Кривая, соединяющая эти точки, и будет кинематической траекторией полета снаряда.
, которые пролетает снаряд за интервалы времени Δt. Зная интервалы , находим точки, определяющие положение снаряда через интервалы времени Δt на прямых линиях ПУ- цель. Кривая, соединяющая эти точки, и будет кинематической траекторией полета снаряда.
В методе совмещения с упрежденной точкой линия, соединяющая пункт управления и снаряд, должна проходить не через цель, а через некоторую упрежденную точку. Траектория снаряда будет зависеть от метода, по которому определяется упрежденная точка. Таким образом, с ПУ можно осуществлять наведение, например, параллельным сближением.
Для определения упрежденной точки на пункте управления необходимо знать дальности до снаряда и цели. Следовательно, аппаратура управления оказывается более сложной, чем при наведении методом совмещения с целью. Однако во многих случаях усложнение системы управления оправдывается снижением требований к маневренности снаряда. Именно, стремясь получить достаточно прямолинейные траектории снаряда при произвольных ракурсах движения цели относительно ПУ, и переходят к наведению в упрежденную точку.
Из рисунка 3.4 видно, что
 . (3.16)
. (3.16)
Делая предположение о малости угла  которое справедливо при
которое справедливо при  , получаем
, получаем
 (3.17)
(3.17)
Использование в (3.17) предположения о том, что расстояние снаряд-цель много меньше расстояния снаряд-пункт управления, основано на том, что переход на трехточечное наведение с упреждением целесообразно осуществлять на достаточно большом удалении снаряда от ПУ. С удалением снаряда от ПУ возрастает кривизна кинематической траектории снаряда и целесообразно переходить на метод наведения с упреждением.
Для каждого из методов наведения существует необходимый для управления снаряда состав параметров, измеряемых радиотехническими устройствами. Таким параметрами могут быть: угловые координаты цели и снаряда, их производные по времени; расстояние от пункта управления до цели и до снаряда и их производные; высота полета; боковой снос снаряда от плоскости стрельбы и др.
При двухточечном наведении эти параметры обычно должны измеряться на борту самолета. При трехточечном в основном – на пункте управления. В случае фиксированных траекторий измерительная аппаратура может устанавливаться как на снаряде, так и на пункте управления.
Дата добавления: 2017-09-01; просмотров: 4912;
Поиск по сайту
Узнать еще
- I. История открытия и методы исследования вирусов
- II. Категории и методы политологии.
- III. Методы искусственной физико-химической детоксикации.
- Абсолютный возраст горных пород и методы его определения
- Автоматические методы изготовления фотошаблонов.
- Агротехнические методы (приемы) обработки почвы.
- Административные методы управления природопользованием
- АКТИВНЫЕ МЕТОДЫ ПРОФКОНСУЛЬТАЦИЙ И ПРОФОРИЕНТАЦИОННЫЕ ИГРЫ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
