Постановка задачи и основные определения
Многомерная оптимизация
Задача, требующая нахождения оптимального значения функции m переменных f(Х)=f(x1, x2, …, xm), называется задачей многомерной оптимизации. Так же, как и для случая одномерной оптимизации, задача нахождения максимума функции сводится к задаче нахождения минимума путем замены целевой функции f на -f.
Пусть функция f(Х) = f(x1, x2, …, xm) определена на некотором множестве ХÎRm. Если Х=Rm (т.е. ограничения на переменные x1, x2, …, xm отсутствуют), принято говорить о задаче безусловной минимизации. В противном случае, когда Х ¹Rm, говорят о задаче условной минимизации.
Методы решения задачи безусловной минимизации являются основой для перехода к изучению более сложных методов решения задач условной минимизации.
В постановке задачи безусловной оптимизации для f(Х)=f(x1, x2, …, xm) требуется найти хотя бы одну точку минимума Х* и вычислить f*=f(Х*). Точка Х*ÎRm называется точкой глобального минимума функции fна множестве Х, если для всех ХÎRm выполняется неравенство f(Х*)£f(Х). В этом случае значение f(Х*) называется минимальным значением функции fна Rm.
Точка Х*ÎRm называется точкой локального минимума функции f, если существует такая d - окрестность Ud этой точки (d>0), что для всех ХÎХd=Х  Ud выполняется неравенство f(X*)£f(X).
Ud выполняется неравенство f(X*)£f(X).
Подавляющее большинство методов решения задачи безусловной минимизации в действительности являются методами поиска точек локальных минимумов, среди которых затем выделяют глобальный минимум, являющийся наименьшим. Этот способ очень трудоемок, поэтому чаще используют другой: местоположение точки глобального минимума определяют в ходе анализа решаемой задачи, а затем для его уточнения с заданной точностью применяют один из методов поиска точки локального минимума.
Рассмотрим функцию нескольких переменных и введем для нее основные определения.
Множество точек, для которых целевая функция принимает постоянное значение f(x1, x2, …, xm) = c, называется поверхностью уровня. Для функции двух переменных (m = 2) это множество называется линией уровня.
Функция f(x1,x2) задает в трехмерном пространстве некоторую поверхность U=f(x1,x2) (рис. 1.8.1-1), низшая точка которой и дает решение задачи минимизации. Для того чтобы изобразить рельеф этой поверхности, проведем несколько плоскостей
(U = const): U=c1, U=c2, U=c3 . Проекции на плоскость Ох1х2 линий пересечений этих плоскостей с поверхностью и даютлинии уровня.
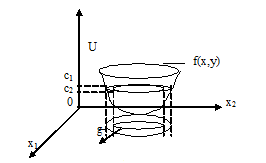
Рис. 1.8.1-1
Для дифференцируемой функции можно определить вектор из первых частных производных, который называется градиентом  :
:
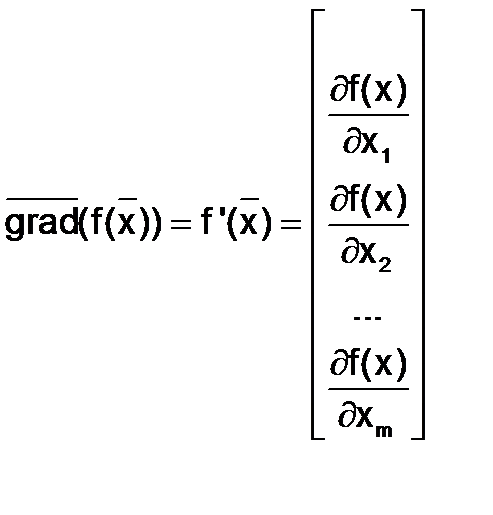 или
или  .
.
Направление вектора градиента  указывает направление наискорейшего возрастания функции, а его модуль (длина) равен скорости возрастания функции. Вектор Градиент нормален к линии уровня в каждой своей точке и касателен к поверхности, которую задает функция.
указывает направление наискорейшего возрастания функции, а его модуль (длина) равен скорости возрастания функции. Вектор Градиент нормален к линии уровня в каждой своей точке и касателен к поверхности, которую задает функция.
Вектор -  называется антиградиентом и показывает направление наискорейшего убывания функции.
называется антиградиентом и показывает направление наискорейшего убывания функции.
Равенство нулю градиента в точке Х является необходимым условием того, чтобы внутренняя для множества Хi (i = 1, 2,…m) точка Х была точкой локального минимума дифференцируемой функции f. Точка Х, для которой выполняется равенство f’(X) = 0, называетсястационарной точкой функции.
Это равенство представляет собой систему из m нелинейных уравнений относительно компонент х1, х2, …, хm, вектора X, где m – количество переменных.


Для функции двух переменных Q(x, y)это условие имеет вид:
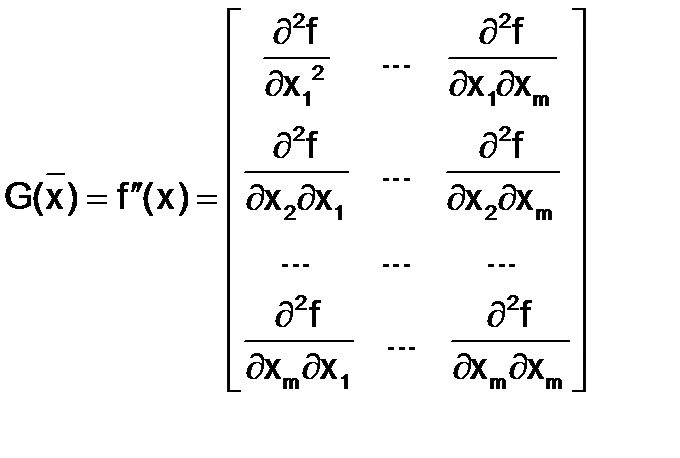
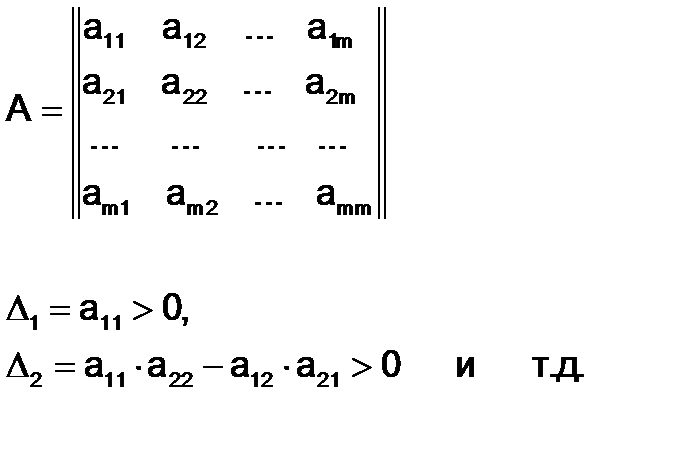
Однако не всякая стационарная точка является точкой минимума. Для всякой непрерывно дифференцируемой функции f достаточным условием того, чтобы стационарная точка Х была точкой локального минимума, является положительная определенность матрицы вторых производных (матрицы Гессе):
Согласно критерию Сильвестра, для того чтобы матрица была положительно определена, необходимо, чтобы все угловые миноры были положительны:
Для функции двух переменных Q(x, y) матрица Гессе имеет вид:
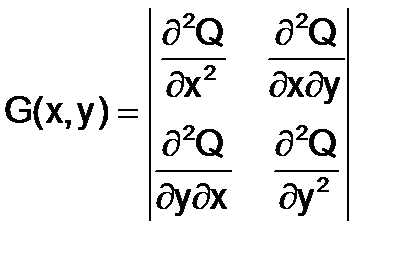 ,
,
а достаточное условие существования минимума:

Алгоритм решения задачи оптимизации функции двух переменных Q(x,y) аналитическим (классическим) методом следующий:
1.Составляется и решается система уравнений
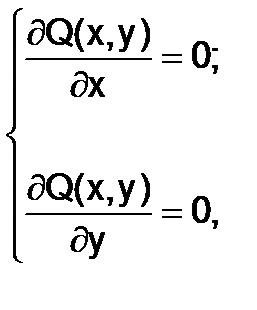
из которой находятся (x*, y*).
2.Проверяются достаточные условия существования минимума
. 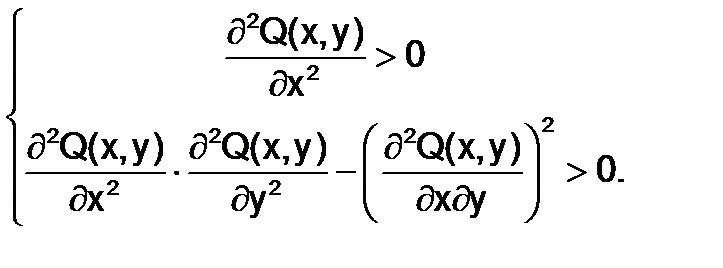
Если (x*, y*) – единственное решение и в этой точке выполняются достаточные условия, то это точка минимума. Если хотя бы в одном из неравенств получается знак “<”, то минимума не существует. В случае появления знака “=” необходимо исследовать производные высших порядков.
Дата добавления: 2016-05-31; просмотров: 1428;
Поиск по сайту
Узнать еще
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cущность организации и ее основные признаки
- I. Назначение унифицированных газозарядных станций и основные тактико-технические требования, предъявляемые к ним.
- I. ОСНОВНЫЕ ПОЛОЖЕНИЯ
- I. Политический режим: понятие, сущность и основные типы.
- I.2. Основные категории водопотребления промышленных предприятий и их особенности
- II. Основные задачи ГО
- II. Основные задачи службы торговли и питания

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
