ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ИЗОГНУТОЙ ОСИ БАЛКИ
ИЗГИБ. ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ
Под действием нагрузки балка искривляется. Сечения балки перемещаются перпендикулярно первоначально прямой оси балки и одновременно поворачиваются (рис. VII.1).
Перемещение центра тяжести сечения по направлению, перпендикулярному оси балки, называется прогибом балки в данной точке (сечении) и обозначается u.
Угол J, на который сечение поворачивается по отношению к своему первоначальному положению, называется углом поворота сечения.
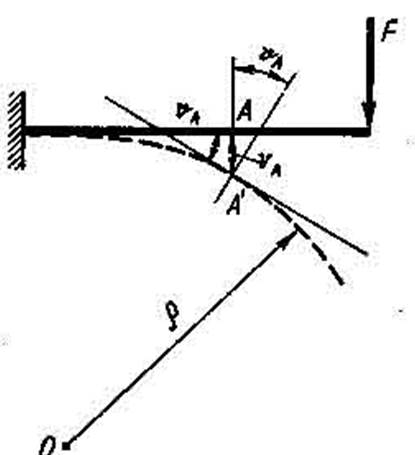
Учитывая, что повернувшееся сечение перпендикулярно изогнутой оси балки, заключаем, что вместо определения угла поворота сечения можно определять равный ему угол между касательной к данной точке изогнутой оси и первоначальной осью балки (рис. VII.1, где прогиб и угол поворота сечения даны для точки А).
Для определения деформаций балки воспользуемся уравнением
К = 1/r = М / (ЕI), (VII.1)
связывающим кривизну оси балки с изгибающим моментом и жесткостью сечения балки (см. § 52).
Из курса математики известна следующая формула для кривизны линии:
 (VII.2)
(VII.2)
где  ,
, 
Подставляя это значение К в формулу (VII.1), получаем
 (VII.3)
(VII.3)
 Уравнение (VII.3) представляет собой точное дифференциальное уравнение изогнутой оси балки (упругой линии). Интегрирование этого нелинейного уравнения представляет большие трудности. Однако для большинства практических задач величиной
Уравнение (VII.3) представляет собой точное дифференциальное уравнение изогнутой оси балки (упругой линии). Интегрирование этого нелинейного уравнения представляет большие трудности. Однако для большинства практических задач величиной  ввиду малости деформаций по сравнению с единицей можно пренебречь.
ввиду малости деформаций по сравнению с единицей можно пренебречь.
Фактические значения углов поворота сечений балки порядка тысячных долей радиана. Если даже принять J = 0,01 рад, то и в этом случае величина J2=(u')2 ничтожно мала по сравнению с единицей.
Рис. VII.
Отбрасывая (u')2 в знаменателе формулы (VII. 3), получим приближенное дифференциальное уравнение изогнутой оси балки
 (VII.4)
(VII.4)
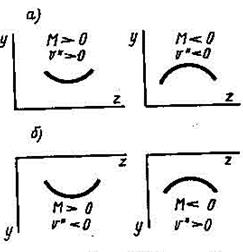
интегрирование которого не представляет затруднений. Выбор знака определяется принятой системой координат. Для системы координат, приведенной на рис. VII.2, а, имеем одинаковые знаки для кривизны  и для момента М.
и для момента М.
Следовательно, в этой системе координат следует пользоваться уравнением (VII. 4) в виде
 (VII.5)
(VII.5)
Для системы координат, принятой на рис. VII.2, б, имеем разные знаки для u" и М. Следовательно, в этом случае следует пользоваться уравнением (VI 1.4) в виде
 (VII.6)
(VII.6)
В дальнейшем будем пользоваться системой координат, показанной на рис. VII.2, а, и дифференциальным уравнением изогнутой оси, записанной в виде (VII.5).
Для вычисления углов поворота  и прогибов u необходимо произвести интегрирование уравнения (VII.5), что может быть выполнено тремя способами: аналитическим, графоаналитическим и графическим.
и прогибов u необходимо произвести интегрирование уравнения (VII.5), что может быть выполнено тремя способами: аналитическим, графоаналитическим и графическим.
Рассмотрим аналитический способ.
Проинтегрировав уравнение (VII.5) один раз, получим уравнение углов поворота
 (VII.7)
(VII.7)
где С – постоянная интегрирования.
Интегрируя второй раз, получаем уравнение прогибов
 (VII.8)
(VII.8)
где D – вторая постоянная интегрирования.
Постоянные интегрирования С и D определяются из условий опирания балки (граничных условий). Так, для балки, заделанной одним концом (см. рис. VII.1), в месте заделки должны быть равны нулю и прогиб, и угол поворота сечения. Для балки, опертой по концам, прогиб должен быть равен нулю и на левом, и на правом конце.
Определив постоянные интегрирования, можно из уравнений (VII.7) и (VII.8) определить угол поворота и прогиб любого сечения.
Во многих случаях по эксплуатационным соображениям максимальные прогибы балок ограничиваются определенной величиной – допускаемым прогибом uadm*. Допускаемый прогиб зависит от назначения сооружения или машины. Например, для подкрановых балок принимают
uadm = (1/600 – 1/700) l
где l – пролет балки.
В машиностроении норма допускаемого прогиба колеблется в довольно широких пределах; в зависимости от назначения детали принимают
uadm = (1/1000 – 1/300) l
Наибольшие углы наклона опорных сечений валов на роликовых подшипниках не должны превосходить 0,001 рад.
* В специальной технической и справочной литературе допускаемая стрела прогиба (максимального прогиба) обычно обозначается fadm
Пример VII.1. Определить umax и Jmax для консоли нагруженной сосредоточенной силой на конце (рис. VII.3).
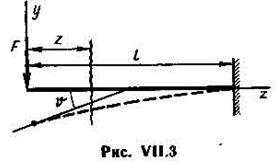 Р е ш е н и е. Начало координат поместим на левом конце балки. Изгибающий момент в сечении с абсциссой z определяем как момент внешних сил, расположенных между данными сечением и началом координат:
Р е ш е н и е. Начало координат поместим на левом конце балки. Изгибающий момент в сечении с абсциссой z определяем как момент внешних сил, расположенных между данными сечением и началом координат:
Мz = - Fz
Следовательно, 
Интегрируем первый раз 
Интегрируем второй раз 
Для определения С и D имеем следующие условия:
1) при z = l u = 0; 2) при z = l J = u' = 0.
Из второго условия получаем С = Fl2/2.
Из первого условия получаем 0 = Fl3/6+Fl2/2+D , откуда D = – Fl3/3. Теперь можно определить umax и Jmax
Совершенно очевидно, что umax и Jmax имеют место при z = 0. Полагая в формулах z = 0, получаем
 ;
;  (VII.9)
(VII.9)
Положительное значение угла поворота J указывает, что сечение поворачивается в направлении, противоположном движению часовой стрелки.
Отрицательное значение u показывает, что центр тяжести сечения перемещается вниз, т.е. в сторону отрицательных значений ординат u.
Обратим внимание на то, что  (VII. 10)
(VII. 10)
и  (VII.11)
(VII.11)
где u0 – прогиб в начале координат, J0 – угол поворота в начале координат.
Зависимости (VII.10) и (VII.11) всегда будут справедливы для балок, имеющих один участок нагружения, если вычислять изгибающие моменты от сил, расположенных между сечением и началом координат.
Это же остается в силе и для балок с любым числом участков нагружения, если вместо способа неопределенного интегрирования уравнения (VII.5) применить способ определенного интегрирования (см. § 59).
Нагружая образец по рис. VII.3, весьма просто определить модуль упругости материала.
Зная нагрузку F1 соответствующую прогиб конца образца – u1 (определенный каким-либо прибором, например индикатором) можно из формулы (VI1.9) получить значение модуля упругости:

Определение модуля упругости путем испытания образцов на растяжение представляет более сложную процедуру.
Дата добавления: 2016-06-05; просмотров: 4446;
Поиск по сайту
Узнать еще
- C учетом изменения статической работы балки
- I.1.2 ТЕРМОДИНАМИЧЕСКАЯ СИСТЕМА. ТЕРМОДИНАМИЧЕСКИЕ ПАРАМЕТРЫ. УРАВНЕНИЕ СОСТОЯНИЯ
- I.1.4 ИДЕАЛЬНЫЙ ГАЗ. ГАЗОВЫЕ ЗАКОНЫ. УРАВНЕНИЕ СОСТОЯНИЯ ИДЕАЛЬНОГО ГАЗА
- I.1.6 ОСНОВНОЕ УРАВНЕНИЕ КИНЕТИЧЕСКОЙ ТЕОРИИ ГАЗОВ. ЗАКОН РАВНОМЕРНОГО РАСПРЕДЕЛЕНИЯ ЭНЕРГИИ ПО СТЕПЕНЯМ СВОБОДЫ
- I.3.1 УРАВНЕНИЕ ВАН-ДЕР-ВААЛЬСА
- I.6.3 ДВИЖЕНИЕ ЖИДКОСТЕЙ И ГАЗОВ. УРАВНЕНИЕ БЕРНУЛЛИ
- II серия. КОСИ-ВАДЗА.
- II. Абсолютное пространство по самой своей сущности, безотносительно к чему бы то ни было внешнему, остается всегда одинаковым и неподвижным».

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
