формирование программ управления трддФсм на нефорсированных режимах
Для ТРДДФсм как и для ТРДФ справедливы общие принципы формирования программ управления на бесфорсажных режимах:
– обеспечения максимально возможных значений тяги на максимальных режимах во всех условиях полёта;
– обеспечение высокой экономичности на крейсерских режимах;
– обеспечение эксплуатационных ограничений, т.е. недопущение механических и тепловых перегрузок элементов конструкции двигателя и к предотвращению неустойчивых режимов работы каскадов компрессора.
Если в конструкции двигателя имеется регулируемое сопло с возможностью регулирования площади его критического сечения, то формирование программы управления двигателя надо начинать с выбора программы управления значением  , так как от неё зависит положение рабочей линии на характеристике КНД и соответственно условия наступления тех или иных эксплуатационных ограничений.
, так как от неё зависит положение рабочей линии на характеристике КНД и соответственно условия наступления тех или иных эксплуатационных ограничений.
На практике применяются следующие способы управления площадью  :
:
1.Поддержание условия  на всех режимах работы двигателя или обеспечение заданного изменения величины
на всех режимах работы двигателя или обеспечение заданного изменения величины  при изменении
при изменении  . (двигатели типа РД‑33).
. (двигатели типа РД‑33).
2. Поддержание на всех режимах полета заданного расположения рабочей линии на характеристике КНД (например, путем задания в САУ двигателя закона  .
.
После того как программа управления площадью определена, определяются эксплуатационные ограничения.
Прочностные ограничения вводятся из условия сохранения допустимых запасов прочности и жаропрочности в элементах конструкции при изменении условий полета и режимов работы двигателя. Характерным для всех ГТД является ограничение максимально допустимых частот вращения роторов nmax, а также максимально допустимой температуры газа перед турбиной  ..
..
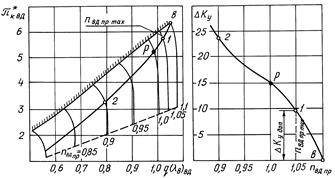 Рис. 34.1
Рис. 34.1
|
Ограничения по запасам устойчивости работы каскадов компрессора вводится в тех случаях, когда величина запаса устойчивости DКу одного из каскадов приближается к минимально допустимому значению. У ТРДДФсм при снижении приведенных частот вращения каскадов компрессоров в реальных условиях их регулирования значения DКу.ВД и DКу.НД обычно повышаются и ограничений по запасу устойчивости вводить не требуется. Ограничение по DКу.min у этих двигателей, как правило, наступает в области режимов, где приведенные частоты вращения каскадов компрессора достигают величин более 100% и дальнейшее повышение  уже недопустимо. Тогда ограничиваемыми параметрами является величины
уже недопустимо. Тогда ограничиваемыми параметрами является величины  или
или  .
.
Определение предельно допустимых значений приведенных частот вращения каскадов компрессора производится после построения рабочих линий на их характеристиках. Рассмотрим в качестве примера рабочую линию а характеристике одного из КВД (рис. 34.1). Как видно, в расчетной точке «р» (при  =1,0) величина DКу.р здесь составляет 15%. Но при
=1,0) величина DКу.р здесь составляет 15%. Но при  =1,05 (точка 1) запас устойчивости снижается до минимально-допустимого значения, которое в данном примере принято равным 10%. А при =1,1 (точка «в») уже DКу=0, т.е. возникает потеря устойчивости КВД («верхний срыв»). Следовательно, в данном случае =1,05. Но каждому значению
=1,05 (точка 1) запас устойчивости снижается до минимально-допустимого значения, которое в данном примере принято равным 10%. А при =1,1 (точка «в») уже DКу=0, т.е. возникает потеря устойчивости КВД («верхний срыв»). Следовательно, в данном случае =1,05. Но каждому значению  , как и в двухвальном ТРД, при выбранной программе регулирования соответствует вполне определенное значение
, как и в двухвальном ТРД, при выбранной программе регулирования соответствует вполне определенное значение  . Это следует из условий совместной работы элементов ТРДДсм при заданной программе изменения . Поэтому условию = соответствует условие =
. Это следует из условий совместной работы элементов ТРДДсм при заданной программе изменения . Поэтому условию = соответствует условие =  . Поэтому независимо от того, какой каскад вызывает необходимость ограничения максимально допустимой приведенной частоты вращения,это ограничение сводится к условию
. Поэтому независимо от того, какой каскад вызывает необходимость ограничения максимально допустимой приведенной частоты вращения,это ограничение сводится к условию  .
.
После того как для двигателя установлены предельно допустимые значения основных ограничиваемых параметров, то может быть определена (сформирована) программа управления на максимальном режиме.
Рассмотрим в качестве примера формирование такой программы при условии, что система управления соплом обеспечивает заданное расположение рабочей линии на характеристике КНД. Тогда свободным остается только один управляющий фактор – расход топлива Gт. В этом случае в качестве управляемого может быть принят только один какой-либо параметр. Им может быть  , или
, или  , или
, или  , или
, или  . Задание закона изменения одного из этих параметров однозначно определяет изменение всех остальных параметров.
. Задание закона изменения одного из этих параметров однозначно определяет изменение всех остальных параметров.
Программа управления ТРДДФсм на максимальном режиме изображается (как и для ТРД) в виде зависимости управляемых параметров от температуры  , которая характеризует влияние на двигатель условий полёта (
, которая характеризует влияние на двигатель условий полёта (  и
и  ). При каждом значении температуры
). При каждом значении температуры  на предельных режимах можно вводить ограничение только на один какой-либо параметр.Поэтому в том или ином диапазоне температур
на предельных режимах можно вводить ограничение только на один какой-либо параметр.Поэтому в том или ином диапазоне температур  ограничивается либо
ограничивается либо  , либо
, либо  , либо
, либо  , либо
, либо  . Такая программа регулирования часто называется комбинированной.
. Такая программа регулирования часто называется комбинированной.
На рис. 34.2 в качестве примера изображена комбинированная программа управления ТРДДФсм на максимальном режиме, имеющая четыре участка: I – nНД.пр = nНД.пр.max ;
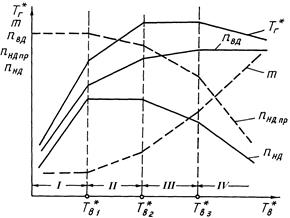 Рис. 34.2
Рис. 34.2
|
II – nНД = nНД.max; III –  ; IV – nВД = nВД. max.
; IV – nВД = nВД. max.
На участке I при низких значениях температуры  ограничиваемым параметром является
ограничиваемым параметром является  соответственно
соответственно  , причем условию nНД.пр = const при
, причем условию nНД.пр = const при  соответствует и nВД.пр = const. В этом случае с ростом температуры
соответствует и nВД.пр = const. В этом случае с ростом температуры  nНД и nВД увеличиваются пропорционально
nНД и nВД увеличиваются пропорционально  (так как
(так как  ), а температура , как можно показать, изменяется пропорционально
), а температура , как можно показать, изменяется пропорционально  .
.
На участке II действует ограничение по  . При этом поддержание nНД =const при увеличении требует значительного увеличения температуры . Причиной этого является (как мы установили на прошлой лекции) рост степени двухконтурности при уменьшении
. При этом поддержание nНД =const при увеличении требует значительного увеличения температуры . Причиной этого является (как мы установили на прошлой лекции) рост степени двухконтурности при уменьшении  и соответственно работы ТНД, требуемой для вращения КНД, так как
и соответственно работы ТНД, требуемой для вращения КНД, так как  . Но увеличение
. Но увеличение  вызывает раскрутку ротора высокого давления. Следовательно, на участке II автоматически обеспечивается «температурная раскрутка» РВД при увеличении температуры
вызывает раскрутку ротора высокого давления. Следовательно, на участке II автоматически обеспечивается «температурная раскрутка» РВД при увеличении температуры  (например, при возрастании числа М полета).
(например, при возрастании числа М полета).
На участке III (см.рис. 34.2) своего максимально допустимого значения достигает температура  . При поддержании
. При поддержании  , если КВД «облегчается» при снижении
, если КВД «облегчается» при снижении  (как в рассматриваемом примере), то с ростом температуры продолжается увеличение , хотя и с замедленным темпом по сравнению с участком II. А частота вращения начинает падать (так как для поддержания nНД =const, как только что отмечалось, требовался бы рост ).
(как в рассматриваемом примере), то с ростом температуры продолжается увеличение , хотя и с замедленным темпом по сравнению с участком II. А частота вращения начинает падать (так как для поддержания nНД =const, как только что отмечалось, требовался бы рост ).
На участке IV в случае «облегчающегося» КВД уже возникает потребность ограничения  , что сопровождается уменьшением и еще более сильным, чем на участке III, снижением
, что сопровождается уменьшением и еще более сильным, чем на участке III, снижением  с увеличением .
с увеличением .
На практике может использоваться еще один вариант представления программы управления двигателя.
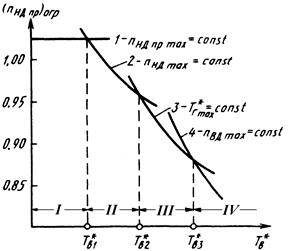 Рис. 34.3
Рис. 34.3
|
Зная заданные максимально допустимые значения ограничиваемых параметров и имея взаимосвязь их с остальными параметрами, устанавливаемую характеристиками ТКМ, можно найти значения параметра  , соответствующие тому или иному ограничению при различных значениях . Примерный характер таких зависимостей
, соответствующие тому или иному ограничению при различных значениях . Примерный характер таких зависимостей  от при рассмотренных выше ограничениях показан на рис. 34.3. Вследствие различного наклона четырех кривых, соответствующих этим четырем ограничениям, они пересекаются, как показано на рис. 34.3. Огибающая снизу это семейство кривых называется линией предельных режимов (ЛПР) и дает комбинированную программу управления двигателя при заданных ограничениях в виде зависимости
от при рассмотренных выше ограничениях показан на рис. 34.3. Вследствие различного наклона четырех кривых, соответствующих этим четырем ограничениям, они пересекаются, как показано на рис. 34.3. Огибающая снизу это семейство кривых называется линией предельных режимов (ЛПР) и дает комбинированную программу управления двигателя при заданных ограничениях в виде зависимости  . Точки излома ЛПР соответствуют переходу от одного ограничения к другому. Зная в каждом диапазоне возможного изменения температуры какой из параметров выходит на ограничение, можно найти по характеристике ТКМ изменение всех остальных параметров по температуре .
. Точки излома ЛПР соответствуют переходу от одного ограничения к другому. Зная в каждом диапазоне возможного изменения температуры какой из параметров выходит на ограничение, можно найти по характеристике ТКМ изменение всех остальных параметров по температуре .
Программа управления конкретного ТРДДФсм может несколько отличаться от рассмотренной. Например, если необходимо увеличить тягу двигателя на трансзвуковых скоростях полёта, то в соответствующем диапазоне значений может быть предусмотрена «раскрутка» ротора НД, и т.д.
| <== предыдущая лекция | | | следующая лекция ==> |
| РАБОЧИЕ ЛИНИИ НА ХАРАКТЕРИСТИКЕ КНД И ВЛИЯНИЕ НА НИХ | | | Программы управления ТРДДФсм на форсированных режимах |
Дата добавления: 2018-05-10; просмотров: 718;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- E). Функциональное программирование
- F). Логическое программирование
- II стадия – формирование абсцесса.
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Функционально-структурная организация и программное обеспечение персонального компьютера
- III Всебелорусское собрание. Программа социально-экономического развития Республики Беларусь на 2006 – 2010 гг.
- III. Формирование личности посредством профориентации и организации досуговой деятельности.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
