Типовые структуры РТК на участках станков с ЧПУ – ЭВМ.
Выбор ПР определяется возможностью стыковки его с ЭВМ той или иной модели.
Целесообразность организации РТК на участке станков с ЧПУ определяется в результате многофакторного анализа, учитывающего специфику построения участка, в т.ч. технологический маршрут обработки предметов и состав операций, состав оборудования, планировку, АТСС и др.
На рисунке показаны некоторые типовые структуры РТК. Характерной их чертой является наличие следующего вспомогательного оборудования: магазина схватов 10, кантователя-ориентатора 7 (предусматривающего осуществлять непрерывный комплекс движений по загрузке-разгрузке оборудования; смена баз может потребовать перехват детали ПР), накопителя 11 (складирование полуфабрикатов в тару без загрузки тары, связанной с АТСС), моечной машины 9, КИМ 12.
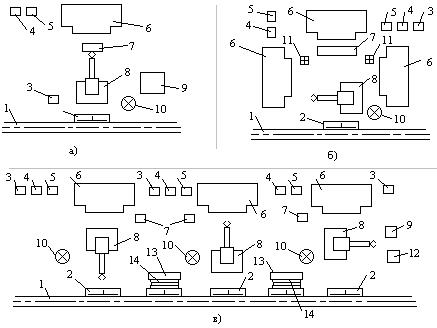
Типовые структуры РТК на участках станков с ЧПУ:
1 – АТСС; 2 – приемный сток; 3 – СУ ПР; 4 – устройство управления РТК; 5 – устройство ПУ станка; 6 – станок; 7 – кантователь-ориентир; 8 – ПР; 9 – моечная машина; 10 – магазин схватов; 11 – промежуточная тара; 12 – КИМ; 13 – промежуточный приемо-передающий стол; 14 – направляющие.
Робототехническая позиция (а) включает напольный ПР стационарного типа. Заготовка поступает в таре, которую располагают на приемном столе 2 АТСС. Обработанные детали складируют в тару, которая функционирует в системе АТСС. Управление ПР и обеспечение взаимосвязи всех устройств обеспечивается СУ ПР-3.
Робототехнический участок (б) включает напольный робот стационарного типа. Заготовки поступают в таре. Обработанную деталь складируют в тару АТСС. Станки расставлены в определенной последовательности операций согласно технологическому маршруту. Промежуточные устройства 11 предназначены для межоперационного складирования внутри участка. Устройства ПР и обеспечение взаимосвязи всех устройств обеспечивает СУ ПР.
Робототехническая линия (в) включает напольный робот подвижного типа. Детали на обработку поступают в паллетах. АТСС подает заготовки и спутники, которые собирают вручную на рабочем месте. Далее ПР захватывает спутник и осуществляет последовательный обход станков 6 по заданному технологическому маршруту. Обработанные детали – спутники складируют на столе и отправляют на последующие операции (мойка, контроль).
Литература
Белянин П.Н. Промышленные роботы и их применение. –М., Машиностроение.1983.
Промышленная робототехника. Под ред. Шифрина Я.А. –М., Машиностроение.1982.
Юревич Е.И. Устройство промышленных роботов. –Л., Машиностроение. 1980.
Современные промышленные роботы. Каталог под ред. Козырева Ю.Г. и Шифрина Я.А. –М., Машиностроение.1984.
Механика промышленных роботов. Тома 1-3. Под ред. Фролова К.В. и Воробьева Е.И. –М., Высшая школа. 1988.
П.Андре, Ж-М. Кофман и др. Конструирование роботов. –М., Мир. 1986.
Кулешов В.С., Лакота Н.А. Динамика систем управления манипуляторами. –М., Машиностроение. 1971.
Петров Б.А. Манипуляторы. –М., Машиностроение. 1989.
Роботизированные технологические комплексы и гибкие производственные системы в машиностроении. Альбом чертежей под ред. Ю.М. Соломенцева. –М., Машиностроение. 1989.
Методические указания
1. Беляев В.Г. Винтовые механизмы качения в станках с ЧПУ и манипуляторах. –М., изд. »Станкин»,1984.
2. Цейтлин Н.И., Косов М.Г. Расчет и конструирование ВЗП. –М., изд. «Станкин»,1981.
3. Жуков К.П., Павлов Ю.А. Проектирование приводов автоматических манипуляторов с программным управлением. –М., изд. »Станкин»,1980.
4. Жуков К.П., Павлов Ю.А. Автоматические манипуляторы с программным управлением. –Оренбург, Оренбургский ПИ.1980.
5. Жуков К.П., Павлов Ю.А., Баскаев Л.К. Расчет и конструирование захватных устройств автоматических машин с программным управлением. –М., изд. »Станкин»,1980.
6. Жуков К.П., Павлов Ю.А. Принципы конструирования автоматических машин с программным управлением. –М., изд. »Станкин»,1982.
7. Жуков К.П., Павлов Ю.А. Манипуляторы специального назначения для автоматизированных станочных систем. –М., изд. »Станкин»,1984.
8. Жуков К.П., Павлов Ю.А. Специализированные автоматические манипуляторы в станкостроении. –М., изд. »Станкин»,1984.
Дата добавления: 2019-12-09; просмотров: 518;
Поиск по сайту
Узнать еще
- III. Механизм действия ионизирующих излучений на биологические структуры
- А - глубиной до 5 м на снегозаносимых участках; б - глубиной до 12 м с безоткосными полками
- Актуальность и значимость создания доступного объекта социальной инфраструктуры.
- Алгебраические структуры и морфизмы.
- Алгебраические структуры на целых числах.
- Алгоритмы линейной структуры и их программирование
- Анализ ассортимента и структуры продукции
- Анализ динамики и структуры финансовых результатов

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
