Функциональные схемы систем КРУ
Радиотелеуправление (командное управление)
В системах радиотелеуправления (командного управления) команды формируются на пункте управления (ПУ). Сформированная команда передается на объект управления через командную радиолинию (КРЛ) телеуправления.
Командное управление может быть использовано для управления движением объектов (самолеты, ракеты, торпеды, корабли, космические аппараты т.д.), работой различной бортовой аппаратуры, а также для управления режимами работы неподвижного агрегата (радиостанции, двигателя, охранной системы и т.п.). Как правило, при этом используются несовмещенные измерительные радиолинии и системы.
В системах следящего управления одним атмосферным ЛА в КРЛ обычно имеются два канала передачи количественных команд управления (например, при декартовом рулевом управлении передаются команды управления по курсу и по тангажу). Эти командные каналы являются радиозвеньями контура управления. Многоканальные КРЛ используются для одновременного управления несколькими атмосферными ЛА.
Дальность действия КРЛ, применяемых в СУ атмосферными ЛА, не превышает нескольких сотен километров. Поэтому обеспечение достаточного энергетического потенциала в таких радиолиниях обычно не вызывает затруднений.
При наведении снарядов для формирования сигнала команды на ПУ необходимо иметь данные о положении и движении снаряда и цели. Существуют два способа получения этих данных. Первый способ – визирование снаряда и цели с ПУ. Способ называется командным радиоуправлением I типа (КРУ- I) Второй способ – визирование цели со снаряда и передача результатов визирования на ПУ через специальную радиолинию передачи данных (КРУ-II) .
Соответствующие способам функциональные схемы приведены на рисунках 6.1 и 6.2.
При наличии радиопротиводействия со стороны противника наиболее слабым звеном системы обычно являются средства визирования цели, работающие по отраженному сигналу. Однако необходимо учитывать и организацию радиопомех работе КРЛ.
КРУ- I. В схеме на рисунке 6.1 РВ цели работает по сигналу, отраженному от цели. РВ снаряда работает по сигналу ответчика управляемого объекта (переизлученный сигнал). Данные радиовизиров обрабатываются в вычислительном устройстве (ВУ), затем вырабатываются команды управления снарядом. Сигнал команды поступает в АП с некоторым запаздыванием, присущим линии передачи команды.
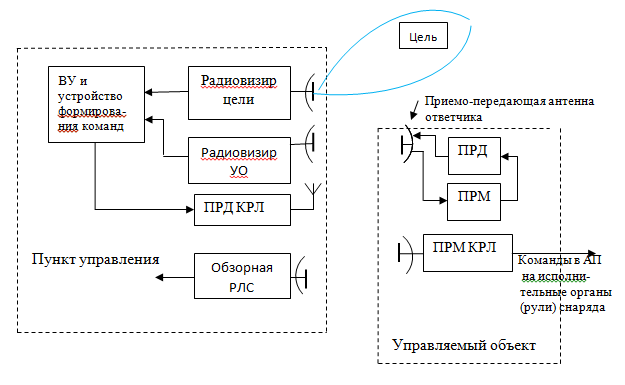
Рисунок 6.1 – Функциональная схема системы управления КРУ- I
Система, изображенная на рисунке 6.1, в ряде случаев может быть упрощена путем совмещения аппаратуры канала запроса в РВ снаряда с аппаратурой командной радиолинии (КРЛ). При известных условиях можно также совместить аппаратуру РВ снаряда с аппаратурой РВ цели. Такое совмещение возможно в тех случаях, когда азимуты и углы места, определяющие положение снаряда и цели в пространстве в единой
системе координат не будут существенно различаться. Особенно
целесообразно такое совмещение при управлении снарядом с самолета.
КРУ- II. В схеме на рисунке 6.2 РВ цели установлен на борту снаряда. Как правило, КРУ- II полуавтоматические системы. В их работе участвует оператор, что и отражено на рисунке. Результаты визирования на борту снаряда в виде телевизионного или радиолокационного изображения цели по специальной радиолинии передаются на ПУ.
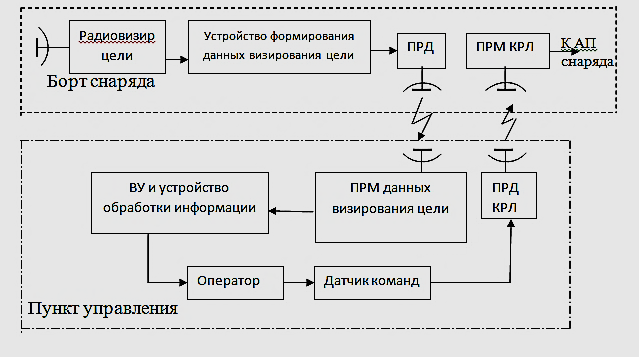
Рисунок 6.2 - Функциональная схема системы управления КРУ- II
Информация о положении цели относительно снаряда, соответствующая радиолокационному или телевизионному изображению, на борту снаряда преобразуется в удобную последовательность кодированных импульсов и по радиолинии трансляции передается на ПУ. Приемная аппаратура ПУ восстанавливает изображение цели и позволяет оператору контролировать угловые рассогласования, возникающие в процессе наведения.
Об оставшейся дальности оператор может судить по задержке отраженных сигналов РВ снаряда или по размерам цели и местных предметов при телевизионном визировании. В последнем случае система управления обладает высокой разрешающей способностью независимо от дальности до ПУ и применяется при наведении снарядов класса «воздух-земля». При использовании системы управления снарядами класса «земля-земля» дальность действия системы может значительно превышать дальность прямой видимости.
Структурная особенность системы управления КРУ- II заключается в том, что по мере сближения с целью трансформация линейных перемещений цели ΔZ или Δh в угловые α, β возрастает обратно пропорционально расстоянию между снарядом и целью:
 и
и  . (6.1)
. (6.1)
Вследствие этого структурная схема системы соответствует структурной схеме системы самонаведения и отличается от нее лишь тем, что сигнал управления (команда) вырабатывается пункте управления, а не на борту. Помехоустойчивость системы КРУ- II несколько ниже, чем системы первого типа в силу того, что она имеет дополнительную линию трансляции, открытую со стороны цели.
Наблюдая за экраном визира, оператор вырабатывает команду управления, которая передается на борт снаряда по командной радиолинии.
Так как при указанном управлении оператор входит в общую замкнутую цепь системы, то необходимо учитывать и его «функцию передачи». На основании статистических исследований реакция оператора на зрительное восприятие может быть описана зависимостью
 , (6.2)
, (6.2)
которая отображает инерционность  и задержку во времени
и задержку во времени  его действий. Высоко тренированный оператор может действовать с опережением, осуществляя также функциональную зависимость
его действий. Высоко тренированный оператор может действовать с опережением, осуществляя также функциональную зависимость  , необходимую для устойчивого управления процессом управления [8].
, необходимую для устойчивого управления процессом управления [8].
В системе управления следует особо учитывать относительные расположения осей трех систем координат: измерительной системы, например РЛС визирования снаряда, исполнительной системы, связанной с мгновенным положением осей снаряда, и командной системы, определяемой вычислительным устройством ПУ. В процессе наведения исполнительная и измерительная системы координат вращаются и скручиваются друг относительно друга, создавая искаженное изображение относительных перемещений цели и снаряда. Эти искажения могу приводить к неправильной выработке команд и перекрестному управлению. При самонаведении оно оказывается меньше, так как в этом случае измерительная система координат практически совпадает с исполнительной.
Скручивание координат устраняется, если координаторы пункта управления и снаряда гиростабилизированы в пространстве. Скручивание может быть устранено также введением соответствующих поправок в команды управления.
Наконец, иногда выделяют командное радиоуправление III типа КРУ- III. Это частный случай КРУ- I, когда цель совмещена с местоположением радиовизира управляемого объекта (наведение «на себя»). Такое управление применяется, например, в системах слепой посадки самолетов, когда оператор РЛС, находящейся в конце взлетно-посадочной полосы, в соответствии с расчетной траекторией посадки передает по радиолинии пилоту команды типа «влево-вправо», «вверх-вниз».
Системы радиотелеуправления могут быть использованы для управления любыми типами снарядов и при любых методах наведения. Однако не все, возможные в принципе, сочетания системы радиотелеуправления и метода наведения являются практически целесообразными. Так, например, применять радиотелеуправление и визирование с ПУ для наведения снаряда по кривой погони не выгодно, так как при этом потребуется неоправданное усложнение аппаратуры.
Радиотелеуправление при визировании цели со снаряда применяется, как вы уже знаете, при ручном управлении. В таком случае оператор имеет возможность формировать команды, учитывая положение цели в системе координат, связанной со снарядом. При автоматическом управлении применять радиотелеуправление при визировании цели со снаряда уже невыгодно. Объясняется это тем, что бортовую ЦВМ можно установить на снаряде и, следовательно, обойтись без радиолинии передачи данных визирования и радиолинии телеуправления, т.е. перейти к самонаведению.
В системах управления снарядами с помощью радиокоманд обеспечивается наведение по заданной траектории и выполнение разовых операций (перевод снаряда в режим самонаведения, аварийный подрыв и т.п.). В комплексах космических аппаратов (КА) радиокоманды используются для корректирующего управления движения центра масс КА и управления работой различной бортовой аппаратуры.
Радиовизиры систем КРУ- I и КРУ- II могу существенно отличаться. В КРУ- II, как уже отмечалось, используется активная РЛС с пассивным ответом. В КРУ- II могут использоваться СВЧ РЛС с секторным сканированием, телевизионные, оптические и тепловые (инфракрасные) устройства. Применение телевизионной камеры на борту ЛА повышает эффективность участия оператора в решении задачи селекции целей, т.к. телевизионное устройство более наглядно и информационно для человека. Активный ответ увеличивает дальность действия и точность измерения координат ЛА.
Вычислительные устройства (ВУ) выполняют разнообразные математические и логические операции, связанные с управлением ЛА.
Дата добавления: 2017-09-01; просмотров: 2432;
Поиск по сайту
Узнать еще
- A. Трубопроводная обвязка окружения испарителя.
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- B. Обвязка и окружение насосной группы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
