Временные импульсные системы радиотеленаведения
Системы радиотеленаведения
Основные понятия
Радиотеленаведение является одним из способов радиоуправления с командного пункта (КП). Отличие радиотелеуправления от радиотеленаведения состоит в следующем. В первом случае несущее колебание модулируется сигналом команды в передающем (ПРД) тракте ПУ. В случае радиотеленаведения несущее колебание оказывается промодулированным соответствующим сигналом только в месте приема. Бортовая приемная (ПРМ) аппаратура объекта управления (ОУ) способна измерять параметр электромагнитного поля, создаваемого ПРД ПУ, в точке нахождения ОУ и таким образом определять свое фактическое положение относительно ПУ.
Управляя излучением ПРД ПУ можно изменять структуру поля и соответственно менять направление линии (или поверхности), вдоль которой происходит наведение.
В литературе используются различные классификации систем радиотеленаведения. Так, например, их различают по методу и траекториям наведения (радиотеленаведение методом совмещения, радиотеленаведение с упреждением, радиотеленаведение по фиксированной кривой и т.д.); по радиосистемам, используемым в качестве звена управления (радионавигационное управление, управление в радиолуче, управление в радиозоне); и т.д. Системы радиотеленаведение классифицируют также по виду модуляции радиосигнала сигналом ошибки управления:
- с амплитудной модуляцией (информационный параметр – глубина амплитудной модуляции; наведение вдоль равносигнальной зоны (прямой или плоскости));
- с временной импульсной модуляцией (наведение по запаздыванию ретранслированного сигнала или по разности запаздывания сигналов, синхронно излученных разнесенными ПУ);
- с фазовой модуляцией (определяется разность фаз гармонических колебаний, непрерывно излучаемых с опорных пунктов);
- с частотной модуляцией (например, применяя частотные дальномеры и измеряя разность расстояний от ОУ до двух ПУ).
Системы радиотеленаведения применяются как для управления в плоскости, так и для пространственного управления. При временной импульсной, фазовой или частотной модуляции обычно используются два ПУ для управления в плоскости и три – для пространственного управления. Некоторой трудностью при этом является сложность обеспечения синхронной работы пунктов управления и разделения в бортовом ПРМ устройстве сигналов, излучаемых разными пунктами управления. Для разделения сигналов иногда применяются поднесущие колебания. В системах с временной импульсной модуляцией подобное разделение можно осуществить, используя импульсно-временные кодовые группы или дополнительные временные задержки. При амплитудной модуляции управление как в плоскости, так и в пространстве практически осуществляется из одной точки.
Пространственное управление в луче является наиболее общим случаем радиотеленаведения. Оно позволяет осуществить наведение на произвольно движущиеся цели, в то время как управление в плоскости может быть использовано только для наведения на неподвижные цели или цели, движущиеся по водной поверхности. Методика наведения в радиолуче подробно изучается вами в ходе выполнения лабораторной работы и в лекциях подробно рассматриваться не будет.
Временные импульсные системы радиотеленаведения
В некоторых системах радиотеленаведения на земле устанавливаются опорные пункты (ОП), снабженные ретрансляторами, которые переизлучают сигналы бортового передатчика либо сигналы наземного пункта управления. Такие системы создают на поверхности Земли сетку линий положения, вдоль которых осуществляется наведение. Форма линий положения зависит от числа и расположения опорных пунктов. Так например, один опорный пункт с ретранслятором задает линию положения в виде окружности. ЛА будет двигаться по окружности заданного радиуса с центром, в котором находится опорный пункт. На ЛА должен быть радиодальномер и система управления, реагирующая на рассогласование по дальности. Два опорных пункта с синхронным излучением радиосигналов задают линии положения в виде семейства гипербол. В бортовом прием ном устройстве определяется разность моментов прихода сигналов из первого и второго пунктов. Измеряя эту разность, выбирают гиперболу по которой происходит наведение. В частном случае, когда устанавливается разность, равная нулю, такая система обеспечивает наведение в плоскости. Изменяя задержку сигнала в ретрансляторе опорного пункта, можно, смещая линии положения, наводить ЛА на выбранную цель.
На рисунке 5.1 приведены геометрические соотношения для временно-импульсной системы наведения на плоскости. На рисунке 5.2 показана функциональная схема системы.
На борту управляемого снаряда установлен радиопередатчик (радиомаяк), излучающий на частоте  периодическую последовательность радиоимпульсов с частотой повторения
периодическую последовательность радиоимпульсов с частотой повторения  (рис.5.3, а). Радиоприемные устройства первого и второго опорных пунктов настроены на частоту . Следовательно, радиоимпульсы бортового ПРД будут приняты ПРМ обоих пунктов (рис.5.3, б I , б II). ПРД первого ОП переизлучает принятые импульсы без изменения их частоты повторения и длительности на несущей частоте
(рис.5.3, а). Радиоприемные устройства первого и второго опорных пунктов настроены на частоту . Следовательно, радиоимпульсы бортового ПРД будут приняты ПРМ обоих пунктов (рис.5.3, б I , б II). ПРД первого ОП переизлучает принятые импульсы без изменения их частоты повторения и длительности на несущей частоте  (рис.5.3, вI ). Временная задержка при этом переизлучении отсутствует (паразитными задержками в цепях пренебрегаем). ПРД второго ОП переизлучает принятые импульсы также без изменения их частоты повторения и длительности, но с задержкой
(рис.5.3, вI ). Временная задержка при этом переизлучении отсутствует (паразитными задержками в цепях пренебрегаем). ПРД второго ОП переизлучает принятые импульсы также без изменения их частоты повторения и длительности, но с задержкой  (рис.5.3, в II) и на другой несущей частоте
(рис.5.3, в II) и на другой несущей частоте  . Последнее обеспечивает возможность частотного разделения каналов в бортовом ПРМ. Первый бортовой ПРМ настроен на частоту , второй – на частоту . Частоты и и полосы пропускания бортовых ПРМ выбираются таким образом, чтобы обеспечить раздельный прием сигналов с обоих ОП.
. Последнее обеспечивает возможность частотного разделения каналов в бортовом ПРМ. Первый бортовой ПРМ настроен на частоту , второй – на частоту . Частоты и и полосы пропускания бортовых ПРМ выбираются таким образом, чтобы обеспечить раздельный прием сигналов с обоих ОП.
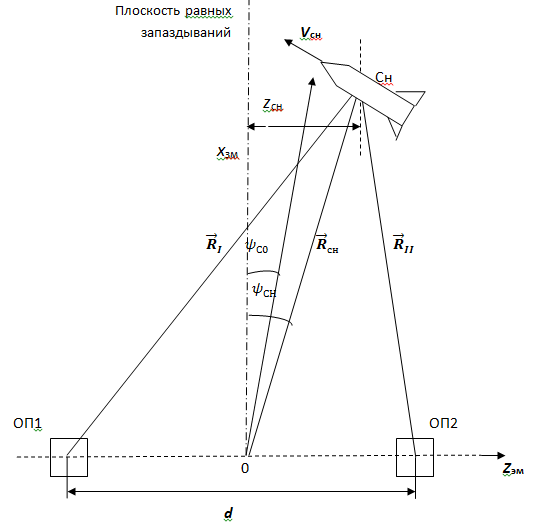
Рисунок 5.1 - Геометрические соотношения для временно-импульсной системы радиотеленаведения на плоскости

| Блок формирования команд |
Бортовая
аппаратура
| Потенциометр дальности |

 .
.
| Демодулятор временных интервалов |
| Блок дальности |
| Триггер |


| Автономный радиомаяк |
| Радиоприемное устройство f2 I |
| Радиоприемное устройство f2 II |
гI а гII
f2 I f1 f2 II
вI бI бII вII
| Радиоприемное устройство |
| Радиоприемное устройство |
| Радиопередающее устройство |
| Радиопередающее устройство |
Блок задержки 
|
Опорный пункт I Опорный пункт II
Рисунок 5.2 - Функциональная схема временно-импульсной системы радиотеленаведения на плоскости
Сигналы, принятые бортовыми ПРМ (рис.5.3, г), в результате детектирования превращаются в видеоимпульсы (точки д I и д II на схеме рис.5.2 и соответствующие им временные диаграммы на рис.5.4, д I , д II ). Видеоимпульсы воздействуют на триггер (рис. 5.2), на выходе которого получается напряжение прямоугольной формы (рис.5.3,е). Это напряжение управляет работой демодулятора временных интервалов, на выходе которого образуется сигнал . Если не учитывать инерционности выходного фильтра демодулятора временных интервалов, то значение этого сигнала можно определить по формуле (5.1).
 , (5.1)
, (5.1)
где  и
и  - длительности соответственно первого и второго временного интервалов несимметричного прямоугольного напряжения (рис.5.3, е);
- длительности соответственно первого и второго временного интервалов несимметричного прямоугольного напряжения (рис.5.3, е);  - коэффициент передачи демодулятора временных интервалов;
- коэффициент передачи демодулятора временных интервалов;  - коэффициент команды.
- коэффициент команды.
После коррекции в потенциометре дальности, в блоке формирования команд образуется командный сигнал uк, поступающий в автопилот. Потенциометр дальности в данной системе может управляться и от программного механизма. Возможно также использовать импульсный характер излучения и управлять потенциометром дальности напряжением , которое пропорционально временному запаздыванию, т.е. расстоянию  (рис. 5.1). Напряжение вырабатывается в блоке дальности (рис.5.2).
(рис. 5.1). Напряжение вырабатывается в блоке дальности (рис.5.2).
Установим для рассматриваемой системы радиотеленаведения связь между сигналом и углом отклонения  (рис.5.1). При малых по сравнению с расстоянием до снаряда базах (d << Rсн) и небольших отклонениях снаряда от оси xзм (угол визирования невелик) значение угла определяется приближенным равенством
(рис.5.1). При малых по сравнению с расстоянием до снаряда базах (d << Rсн) и небольших отклонениях снаряда от оси xзм (угол визирования невелик) значение угла определяется приближенным равенством
 , (5.2)
, (5.2)
где R I и R II - дальности до управляемого снаряда от первого и второго ОП соответственно. Эти дальности связаны с временем распространения ЭМ колебаний (  )следующими соотношениями
)следующими соотношениями
 , (5.3)
, (5.3)
 , (5.4)
, (5.4)
где c – скорость распространения ЭМ колебаний. Подставляя RI и RII в формулу (5.2), получаем
 . (5.5)
. (5.5)
Установим теперь связь между интервалами времени  и
и  , с одной стороны, и длительностями импульсов прямоугольного напряжения на выходе демодулятора временных интервалов TI и TII, с другой. Эти соотношения даны формулами
, с одной стороны, и длительностями импульсов прямоугольного напряжения на выходе демодулятора временных интервалов TI и TII, с другой. Эти соотношения даны формулами
 , (5.6 а)
, (5.6 а)
 . (5.6 б)
. (5.6 б)
Полученные равенства справедливы, если пренебречь изменением расстояний RI и RII за время Ti, что практически вполне допустимо. Из соотношения (5.5) и (5.6 а) имеем
 . (5.7)
. (5.7)
Из (5.5) с учетом (5.6) и (5.7) получим
 , (5.8)
, (5.8)
где  .
.
T T/2
а)
tI бI)
tII бII)
вI)
t З 0 вII)
2 tI tII 2 tI
гI)
гII)
дI)
д II)
е)
TII TI
T
Рис. 5.3. Временные диаграммы сигналов временной импульсной системы РТН
Таким образом, при отклонении снаряда от направления, заданного углом  , рассматриваемая система вырабатывает сигнал рассогласования . Следовательно, система обеспечивает наведение снаряда вдоль вертикальной плоскости положение которой ( ) можно изменять, меняя время задержки сигнала ( ) в ОП II. Если
, рассматриваемая система вырабатывает сигнал рассогласования . Следовательно, система обеспечивает наведение снаряда вдоль вертикальной плоскости положение которой ( ) можно изменять, меняя время задержки сигнала ( ) в ОП II. Если  , наведение будет происходить вдоль плоскости равных запаздываний (рис.5.1), перпендикулярной базе d и проходящей через ее середину.
, наведение будет происходить вдоль плоскости равных запаздываний (рис.5.1), перпендикулярной базе d и проходящей через ее середину.
Рассмотренная функциональная схема системы имеет два радиоканала. Оба канала идентичны, за исключением значений рабочих частот несущих колебаний. Учитывая формулы (5.8) и (5.1), можно определить
 . (5.9)
. (5.9)
Очевидно, что частота должна значительно превышать максимальную частоту в спектре командного сигнала.
Задавая параметры радиосигнала, необходимо обратить также внимание на выбор частоты повторения импульсов. Максимальное значение частоты ограничивается наибольшим возможным отклонением снаряда от заданной плоскости наведения (  ). При слишком высокой частоте повторения возникает неоднозначность в определении разности
). При слишком высокой частоте повторения возникает неоднозначность в определении разности  , в результате чего может измениться направление наведения. Соответствующее условие получим, полагая, что максимальное значение коэффициента команды χк при нормальной работе триггера (рис.5.2) не должно превышать примерно 0,8.
, в результате чего может измениться направление наведения. Соответствующее условие получим, полагая, что максимальное значение коэффициента команды χк при нормальной работе триггера (рис.5.2) не должно превышать примерно 0,8.
Дата добавления: 2017-09-01; просмотров: 1848;
Поиск по сайту
Узнать еще
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- I.2. Антигены системы АВ0. Генетика. Структура
- I.2.1 ПЕРВЫЙ ЗАКОН НЬЮТОНА. ИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА.
- I.2.1 ПОЛНАЯ И ВНУТРЕННЯЯ ЭНЕРГИЯ СИСТЕМЫ. ТЕПЛОТА И РАБОТА
- I.3. Антитела системы АВ0
- I.5.4 НЕИНЕРЦИАЛЬНЫЕ СИСТЕМЫ ОТСЧЁТА. СИЛЫ ИНЕРЦИИ
- II. ЭЛЕКТРИЧЕСКИЙ ДИПОЛЬ. ДИПОЛЬНЫЙ МОМЕНТ СИСТЕМЫ ЭЛЕКТРИЧЕСКИХ ЗАРЯДОВ
- III. Избирательные системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
