Принципы построения и области применения автономных систем управления

Автономное управление представляет собой способ наведения подвижного объекта или ЛА по программе, задающей траекторию в виде фиксированного направления движения или маршрута. При автономном управлении на борт снаряда в течение процесса наведения не поступает никакой информации ни от цели, ни от ПУ. Все приборы и средства управления находятся на борту. Извлечение необходимой текущей информации для управления и выработки управляющих сигналов осуществляется также на борту с помощью бортовых устройств. Т.е. системы автономного управления характеризуются информационной автономностью. Для них не могут быть созданы организованные помехи, что является их достоинством.
Выделяют:
I. Автономное нерадиотехническое управление.
II. Автономное радиоуправление.
Автономное нерадиотехническое управление применяют при наведении на неподвижные цели, географические координаты которых известны [2,3]. Оно может быть использовано для выведения снаряда в район цели с последующим переходом в режим самонаведения (например, снаряды «поверхность-поверхность», «воздух-поверхность»).
Способы автономного нерадиотехнического управления:
1) Программное гироскопическое управление. Основными элементами программной гироскопической системы является автомат гироскопической стабилизации и программное устройство, формирующее командный сигнал, изменяющийся по заданному закону. Специальные датчики измеряют углы положения оси снаряда относительно гироскопической системы координат. Сигналы с датчиков сравниваются с заданной программой. Автономные программные гироскопические системы используются, в частности, для управления полетом снаряда на первом участке траектории непосредственно после его старта до вхождения в зону действия РТС комплекса управления.
2) Программное управление с использованием физических характеристик Земли. Такими характеристиками могут быть: напряженность магнитного поля Земли, атмосферное давление и сила земного притяжения, зависящие от высоты и др. Чувствительные элементы приборов снаряда реагируют на перечисленные характеристики и определяют параметры фактической траектории. Эти параметры сравниваются с теми, которые выдаются программным устройством. При рассогласовании вырабатывается командный сигнал, который управляет движением через автомат гироскопической стабилизации.
3) Астронавигационное управление. В этом управлении основной элемент – телескоп, работающий в режиме автоматического слежения за выбранной звездой. В программной астронавигационной системе непрерывно вычисляются географические координаты управляемого объекта (широта, долгота). Эти координаты можно определить, наблюдая за двумя небесными светилами с помощью двух бортовых фотоэлектрических следящих секстантов, установленных на стабилизированной платформе. Управление основано на сравнении координат действительного местоположения с координатами, задаваемыми программным устройством. Преимущество такой системы – постоянная точность определения местоположения объекта, не зависящая от времени и дальности полета.
4) Инерциальное управление. Здесь основные элементы – акселерометры (измерители ускорения). Зная географическое положение места старта и имея результат интегрирования ускорений, устанавливают действительное положение снаряда в любой момент времени. Недостаток – накопление ошибок управления.
Для компенсации недостатков отдельных систем создают комбинированные системы – комплексы с другими системами управления, позволяющими периодически определять точное местонахождение подвижного объекта или ЛА. В комплексных СУ использование измерителей различных типов может осуществляться как последовательно, в соответствии с этапами наведения, так и параллельно. Примерами комплексных систем управления являются все системы радиоуправления, так как в той или иной степени они предусматривают сочетание автономных систем стабилизации и управления с радиотехническими устройствами.
Автономное радиоуправление (АРУ) – способ автономного управления, при котором для извлечения информации о местонахождении и движении ЛА используются бортовые радиоизмерительные устройства (измерители высоты, измерители собственной скорости), работающие по радиоориентирам. Радиоориентиры – радиолокационные ориентиры с точно известными географическими координатами (железнодорожные мосты, небольшие острова, характерные изгибы рек и т.п.). АРУ может быть: автоматическим (без участия человека); автоматизированным (с участием человека). В автоматическом управлении программа управления может быть жесткой или гибкой (изменяемой в процессе управления).
Задачи АРУ:
- выведение атмосферного ЛА в район цели;
- контроль и коррекция орбит искусственных спутников Земли; управление маневрированием космического корабля на орбите;
- терминальное управление космического аппарата (управление на заключительном этапе, например при снижении и мягкой посадке).
Недостатки АРУ:
- невозможность наведения на цели, координаты которых заранее неизвестны;
- ограниченность применения к ЛА, высота полета которых высока;
- усложнение бортовой аппаратуры.
Особенности функционирования автономных систем наведения рассмотрим на примере схем, приведенных на рисунках 4.1 и 4.2 [1].
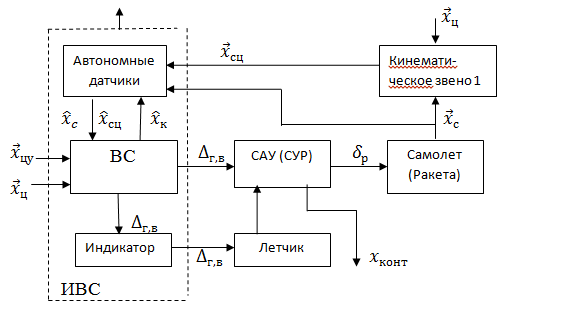
Рисунок 4.1 – Обобщенная структурная схема системы
автономного управления
Координаты цели в виде вектора  вводятся в запоминающее устройство вычислительной системы (ВС), где хранятся в течение всего времени наведения. На их основе и по оценкам
вводятся в запоминающее устройство вычислительной системы (ВС), где хранятся в течение всего времени наведения. На их основе и по оценкам  текущих координат самолета и
текущих координат самолета и  относительного движения самолет-цель, формируемых автономными датчиками, в ВС вычисляются параметры рассогласования
относительного движения самолет-цель, формируемых автономными датчиками, в ВС вычисляются параметры рассогласования  управления самолетом (ракетой) в горизонтальной (по курсу) и вертикальной (по высоте или тангажу) плоскостях. Оценки текущих координат получаются в процессе, так называемого счисления пути, основанного на двукратном интегрировании ортогональных составляющих ускорений объекта управления, либо однократном интегрировании аналогичных составляющих скорости в заранее выбранной системе координат. Конкретный вид функциональной связи , и
управления самолетом (ракетой) в горизонтальной (по курсу) и вертикальной (по высоте или тангажу) плоскостях. Оценки текущих координат получаются в процессе, так называемого счисления пути, основанного на двукратном интегрировании ортогональных составляющих ускорений объекта управления, либо однократном интегрировании аналогичных составляющих скорости в заранее выбранной системе координат. Конкретный вид функциональной связи , и  определяется используемыми методами наведения ЛА по курсу и высоте (тангажу), которые и обусловливают состав автономных датчиков информационно-вычислительной системы (ИВС).
определяется используемыми методами наведения ЛА по курсу и высоте (тангажу), которые и обусловливают состав автономных датчиков информационно-вычислительной системы (ИВС).
Заранее введенные координаты цели на самолете могут быть оперативно изменены экипажем, или по командам целеуказания  с пункта управления. Информация индикатора самолета используется только для контроля процесса управления. По ним осуществляется управление только в ручном и директорном[1] режимах.
с пункта управления. Информация индикатора самолета используется только для контроля процесса управления. По ним осуществляется управление только в ручном и директорном[1] режимах.
Приведение показаний датчиков к единому масштабу и формирование при необходимости сигналов  взаимной коррекции осуществляется в ВС. Для удобства понимания процедур координат
взаимной коррекции осуществляется в ВС. Для удобства понимания процедур координат  на рисунке показано кинематическое звено. Структурная схема управления ракетой получается из схемы на рисунке 4.1 путем исключения из нее индикатора и летчика. Степень готовности аппаратуры ракеты к применению в данном случае запуска с самолета определяется совокупностью сигналов контроля
на рисунке показано кинематическое звено. Структурная схема управления ракетой получается из схемы на рисунке 4.1 путем исключения из нее индикатора и летчика. Степень готовности аппаратуры ракеты к применению в данном случае запуска с самолета определяется совокупностью сигналов контроля  , поступающих в аппаратуру самолета.
, поступающих в аппаратуру самолета.
Особенности построения комбинированных систем наведения рассмотрим на примере схемы, приведенной на рисунке 4.2.
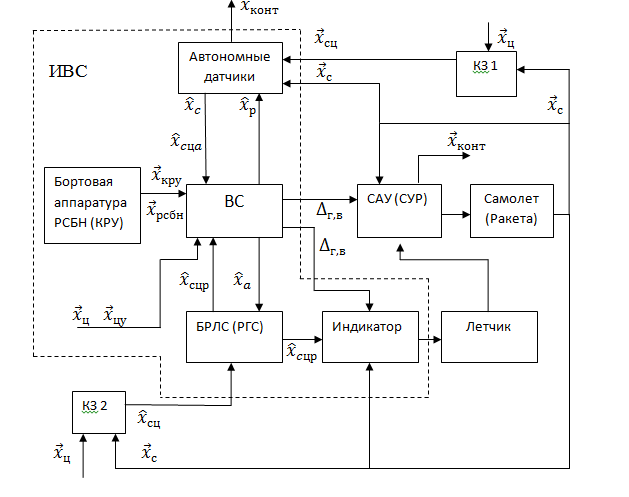
Рисунок 4.2 – Обобщенная структурная схема построения
комбинированных систем управления
В комбинированной системе наведения самолетов последовательного типа на первом этапе используется автономное управление. Если автономное наведение продолжается достаточно долго, то ошибки управления, обусловленные погрешностями счисления пути и уходом гироскопов, могут стать настолько большими, что цель не будет захвачена бортовой РЛС (БРЛС) на автоматическое сопровождение и РЭСУ не сможет перейти к этапу самонаведения. В связи с этим на первом этапе периодически осуществляется коррекция автономной системы, в результате которой
положение ЛА уточняется по датчикам другой физической природы (астроинерциальным, оптоэлектронным, радиотехническим и т.д.).
Достаточно часто для этих целей используется радионавигационная система ближней навигации и БРЛС. В последнем случае заранее по маршруту полета, в пределах дальности БРЛС выбираются радиолокационные ориентиры с точно известными географическими координатами, о которых уже говорилось на стр.3. Измерив дальность до этих ориентиров и их бортовые пеленги, можно точно определить свое местоположение, используя его для дальнейшего счисления пути. При этом счисленные до этого с помощью автономной системы координаты сбрасываются. Поскольку автономная система обычно функционирует в прямоугольных координатах, а БРЛС – в полярных, то в ВС осуществляется пересчет радиолокационных измерений ориентиров в вектор  сигналов радиокоррекции автономных датчиков уже в прямоугольной системе координат. Одновременно в ВС по счисленным координатам вычисляется дальность до цели и ее бортовой пеленг, объединенные в вектор
сигналов радиокоррекции автономных датчиков уже в прямоугольной системе координат. Одновременно в ВС по счисленным координатам вычисляется дальность до цели и ее бортовой пеленг, объединенные в вектор  . В соответствии с этими данными осуществляется включение БРЛС и поиск цели вблизи значений
. В соответствии с этими данными осуществляется включение БРЛС и поиск цели вблизи значений 
и  , что позволяет значительно сократить время, затрачиваемое на ее обнаружение.
, что позволяет значительно сократить время, затрачиваемое на ее обнаружение.
После захвата цели БРЛС на сопровождение начинается этап самонаведения. При этом параметры рассогласования формируются в соответствии с выбранным методом самонаведения на основе оценок фазовых координат относительного  и собственного движения, формируемых БРЛС и автономными датчиками. Процедура преобразования абсолютных фазовых координат цели и ЛА в относительные координаты, измеряемые БРЛС, отображены на рисунке кинематическим звеном КЗ2. Следует подчеркнуть, что на этапе самонаведения в ВС на основании показаний автономных датчиков по-прежнему формируется вектор
и собственного движения, формируемых БРЛС и автономными датчиками. Процедура преобразования абсолютных фазовых координат цели и ЛА в относительные координаты, измеряемые БРЛС, отображены на рисунке кинематическим звеном КЗ2. Следует подчеркнуть, что на этапе самонаведения в ВС на основании показаний автономных датчиков по-прежнему формируется вектор  , который используется для коррекции БРЛС. В общем случае использование сигналов коррекции позволяет повысить точность радиолокационных измерений, увеличить время памяти и уменьшить зону повторного поиска цели по дальности и углам при пропадании отраженных от нее сигналов. Управление самолетом на этапе самонаведения, также как и на этапе автономного наведения, может выполняться в ручном, директорном или автоматическом режимах.
, который используется для коррекции БРЛС. В общем случае использование сигналов коррекции позволяет повысить точность радиолокационных измерений, увеличить время памяти и уменьшить зону повторного поиска цели по дальности и углам при пропадании отраженных от нее сигналов. Управление самолетом на этапе самонаведения, также как и на этапе автономного наведения, может выполняться в ручном, директорном или автоматическом режимах.
Структурная схема комбинированной системы управления ракетами отличается от рассмотренной на рисунке 4.2 отсутствием индикатора и летчика. При этом одним из распространенных вариантов комбинированных систем управления является комбинация автономной системы на начальном участке управления, системы КРУ – применяемой на среднем участке и ССН, которая управляет ракетой в конце наведения. В таком варианте в состав ИВС входит еще и приемная аппаратура КРУ.
Дата добавления: 2017-09-01; просмотров: 4055;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- CRM - стратегия управления взаимоотношениями с клиентом
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
