Типы рулевого управления
Рулевое управление может быть декартовым, полярным или смешанным (комбинированным).
При декартовом управлении рули высоты, поворота и "разгона - торможения" управляют соответственно составляющими  ,
,  и
и  полного ускорения
полного ускорения  в декартовой системе координат (рисунок 2.5).
в декартовой системе координат (рисунок 2.5).
При полярном рулевом управлении один из рулевых органов (руль глубины) управляет модулем ускорения  (в некоторых системах этот рулевой орган может, кроме того, изменять направление вектора
(в некоторых системах этот рулевой орган может, кроме того, изменять направление вектора  на противоположное), а второй рулевой орган – руль крена направлением этого ускорения.
на противоположное), а второй рулевой орган – руль крена направлением этого ускорения.
Полярное управление можно подразделить на два вида:
- управление с экономией крена;
- управление без экономии крена.
Различие этих видов полярного управления иллюстрируется рисунком 2.7.
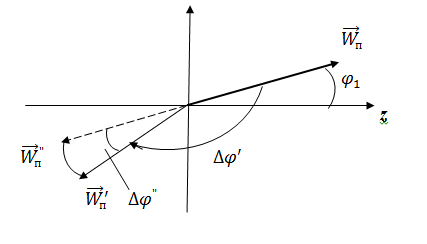
Рисунок 2.7 – Пояснение видов полярного управления
Пусть в процессе управления требуется резко изменить направление ускорения (от  до
до  ). Это изменение можно осуществить двумя способами.
). Это изменение можно осуществить двумя способами.
Первый способ заключается в том, что руль крена поворачивает вектор ускорения на угол  , а руль глубины не меняет своего положения.
, а руль глубины не меняет своего положения.
Второй способ заключается в том, что руль глубины меняет свое отклонение на противоположное, изменяя знак ускорения на обратный (от  ), а руль крена поворачивает вектор ускорения на угол
), а руль крена поворачивает вектор ускорения на угол 
Первый способ соответствует управлению без экономии крена, второй – с экономией крена, так как при втором способе требуется меньше изменения угла крена φ. При управлении без экономии крена изменение направления ускорения во всех случаях осуществляется рулем крена без участи я руля глубины. Во втором случае в некоторых ситуациях (при  ) руль глубины участвует в изменении направления ускорения, создавая изменение знака ускорения на обратный.
) руль глубины участвует в изменении направления ускорения, создавая изменение знака ускорения на обратный.
На рисунке 2.8 приведена схема полярного рулевого управления.
При отклонении руля глубины РГ вверх (на рис. 2.8 по часовой стрелке) набегающий на руль воздушный поток создает момент Мрг,
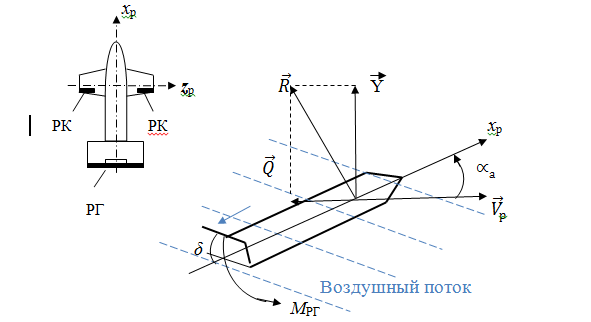
Рисунок 2.8 – Схема полярного рулевого управления
поворачивающий корпус летательного аппарата вокруг оси zр против часовой стрелки. Поворот корпуса вокруг оси zp прекращается, когда вращающий момент, создаваемый воздушным потоком, обтекающим корпус (и действующий в данном случае по часовой стрелке), уравновешивает вращающий момент Мрг, создаваемый рулем глубины. При этом установившееся значение угла αа между продольной осью ракеты и вектором ее скорости Vр (называемого углом атаки) оказывается примерно пропорциональным углу поворота руля δ (при небольших значениях углов).
Результирующая "аэродинамическая сила  , создаваемая набегающим на корпус летательного аппарата воздушным потоком, может быть разложена на составляющие
, создаваемая набегающим на корпус летательного аппарата воздушным потоком, может быть разложена на составляющие  и
и  . При этом величина нормальной составляющей , называемой подъемной силой, пропорциональна углу αа (при малых углах αа ). - лобовое сопротивление.
. При этом величина нормальной составляющей , называемой подъемной силой, пропорциональна углу αа (при малых углах αа ). - лобовое сопротивление.
Подъемная сила создает поперечное ускорение ,
пропорциональное этой силе. Следовательно, отклонение руля глубины РГ на некоторый угол δ создает в установившемся режиме поперечное ускорение  , модуль которого пропорционален углу отклонения руля. Если руль глубины повернется на такой же угол δ, но в противоположном направлении (т. е. против часовой стрелки), то корпус аппарата повернется также в противоположном направлении (по часовой стрелке), и подъемная сила , а следовательно, и ускорение изменят свое направление на противоположное. При этом, если ось zр, жестко связанная с крылом аппарата, горизонтальна, то ускорение всегда будет расположено в
, модуль которого пропорционален углу отклонения руля. Если руль глубины повернется на такой же угол δ, но в противоположном направлении (т. е. против часовой стрелки), то корпус аппарата повернется также в противоположном направлении (по часовой стрелке), и подъемная сила , а следовательно, и ускорение изменят свое направление на противоположное. При этом, если ось zр, жестко связанная с крылом аппарата, горизонтальна, то ускорение всегда будет расположено в
вертикальной плоскости.
Если требуется создать ускорение в другой плоскости, то
корпус аппарата поворачивается вокруг своей продольной оси xp на
некоторый угол, называемый углом крена и создаваемый рулем крена РК[1].
Например, если с помощью рулей крена установится угол крена, равный 90°, то отклонение руля глубины будет создавать ускорение уже не
в вертикальной, а в горизонтальной плоскости.
Таким образом с помощью рулей глубины и крена может быть получено требуемое значение величины и направления поперечного ускорения  аппарата.
аппарата.
На рисунке 2.9 приведены схемы симметричного и несимметричного декартового рулевого управления.
При симметричном декартовом управлении аэродинамические формы объекта в плоскостях одинаковы; поэтому эффективность рулей высоты и поворота одинакова, и поворот ракеты вокруг продольной оси на 900 не изменяет режима ее полета. При несимметричном декартовом управлении эффективность действия руля высоты не равна эффективности действия руля глубины (под эффективностью понимается изменение ускорения, вызываемое отклонением руля, на единицу этого отклонения).
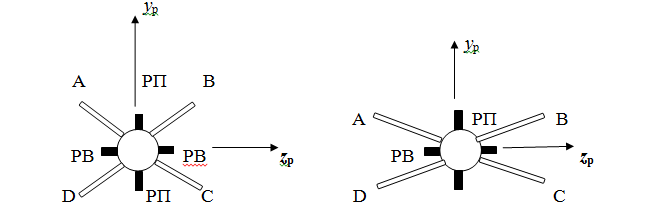
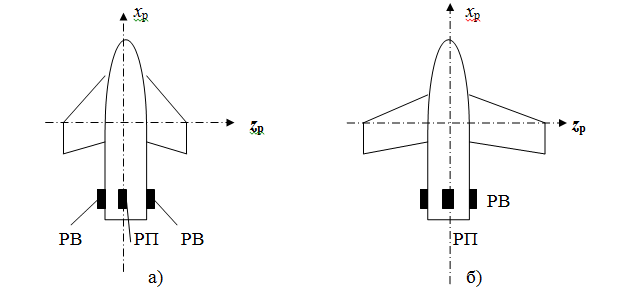
Рисунок 2.9 – Элементы декартова управления
а) симметричное; б) несимметричное
При несимметричной декартовой схеме необходима гиростабилизациякорпуса ракеты от поворотов вокруг продольной оси.
При декартовой схеме управления составляющие поперечного ускорения в вертикальной и горизонтальной плоскостях,  и
и  , создаются соответственно с помощью руля высоты РВ и руля поворота РП. Принцип действия каждого из этих рулей аналогичен описанному выше принципу действия руля глубины. При отклонении руля высоты корпус аппарата поворачивается вокруг оси zр и создается подъемная сила, а, следовательно, и поперечное ускорение в вертикальной плоскости. Отклонение руля поворота РП вызывает поворот корпуса аппарата вокруг оси yР и создание подъемной силы и поперечного ускорения в горизонтальной плоскости.
, создаются соответственно с помощью руля высоты РВ и руля поворота РП. Принцип действия каждого из этих рулей аналогичен описанному выше принципу действия руля глубины. При отклонении руля высоты корпус аппарата поворачивается вокруг оси zр и создается подъемная сила, а, следовательно, и поперечное ускорение в вертикальной плоскости. Отклонение руля поворота РП вызывает поворот корпуса аппарата вокруг оси yР и создание подъемной силы и поперечного ускорения в горизонтальной плоскости.
При декартовом управлении руль крена выполняет лишь вспомогательную функцию - стабилизацию крена аппарата. При появлении какого-либо возмущающего момента, вызывающего крен аппарата (т. е. поворот его корпуса вокруг оси xР), руль крена создает противоположный момент, возвращающий корпус в исходное положение. Конструктивно руль крена может быть при этом совмещен с рулем высоты или рулем поворота.
При комбинированном управлении требуемое изменение ускорения производится в общем случае совместным действием рулей высоты, поворота и крена.
 На рисунке 2.10 изображена схема комбинированного управления. С корпусом ракеты связана система 0xyz. Начало координат 0 находится в центре тяжести ракеты. В схеме величина и направление поперечного ускорения изменяются за счет действия руля высоты РВ, руля поворота РП и руля крена РК.
На рисунке 2.10 изображена схема комбинированного управления. С корпусом ракеты связана система 0xyz. Начало координат 0 находится в центре тяжести ракеты. В схеме величина и направление поперечного ускорения изменяются за счет действия руля высоты РВ, руля поворота РП и руля крена РК.
Рисунок 2.10 – Элементы комбинированного управления ракеты
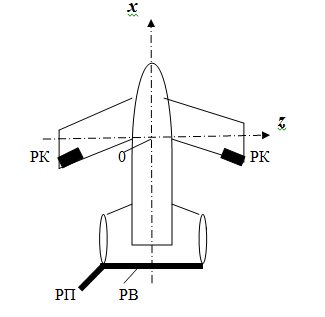
Наибольшее распространение получили две аэродинамические схемы снарядов: крестокрылая (рисунок 2.11) и плоскокрылая (рисунок 2.12).
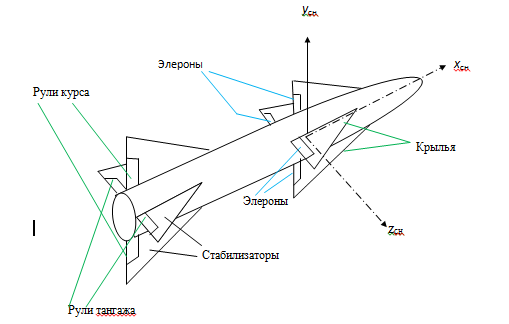
Рисунок 2.11 – Аэродинамическая схема крестокрылого снаряда
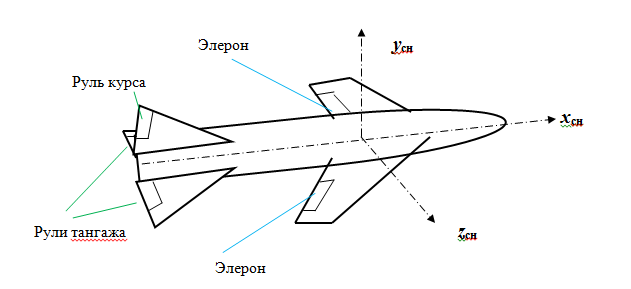
Рисунок 2.12 – Аэродинамическая схема плоскокрылого снаряда
На рисунках показано расположение крыльев и стабилизаторов, а также показаны органы управления снарядами: элероны, рули тангажа (их также называют рули высоты) и рули курса (другое название - рули направления).
Для закрепления материала, рассмотрим механику разворота крестокрылых снарядов. Допустим, что произошло отклонение рулей курса влево по отношению к оси снаряда хсн на угол δн (рисунок 2.13).
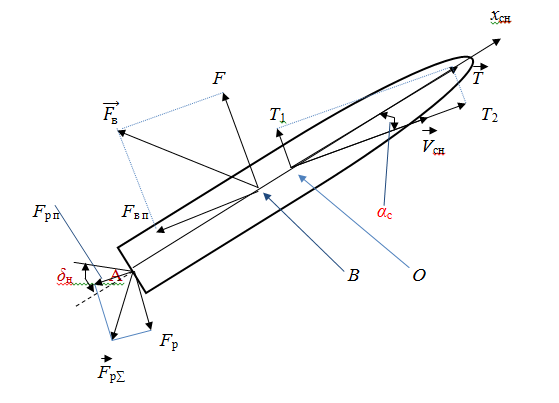
Рисунок 2.13 – К пояснению механики разворота
крестокрылого снаряда
Аэродинамическую силу, действующую на руль перпендикулярно к его поверхности  можно разложить на две составляющие: продольную
можно разложить на две составляющие: продольную
Fр п (по направлению вектора скорости снаряда) и поперечную Fр (перпендикулярную вектору скорости). Продольная - лишь немного увеличивает лобовое сопротивление снаряда и нас интересовать не будет. Под действием силы , проходящей через центр - А приложения аэродинамических сил руля, снаряд начнет разворачиваться вокруг центра масс О (точка приложения силы Т), что приведет к изменению угла скольжения αс между вектором скорости и осью снаряда. Это, в свою очередь, приведет к изменению аэродинамической силы  , которая возникает за счет действия потока воздуха на крылья и корпус снаряда, и к появлению поперечной составляющей
, которая возникает за счет действия потока воздуха на крылья и корпус снаряда, и к появлению поперечной составляющей  силы тяги двигателя
силы тяги двигателя  . Сила проходит через центр приложения аэродинамических сил снаряда В.
. Сила проходит через центр приложения аэродинамических сил снаряда В.
Эту силу также можно разложить на поперечную F и продольную Fв п составляющие. Продольная составляющая Fвп создает лобовое сопротивление снаряда, которое компенсируется продольной составляющей силы тяги двигателя  . Строго говоря, алгебраическая сумма продольных составляющих Т2 – Fв п – Fр п не равна нулю, за счет чего происходит некоторое изменение модуля вектора скорости снаряда при разворотах последнего. Однако это изменение невелико и в дальнейшем учитываться не будет. Ось снаряда будет разворачиваться до тех пор, пока момент силы относительно центра масс не уравновесит момент силы . Равнодействующая поперечная сила F∑ = F – Fр+ Т1, приложенная к центру масс, и будет управляющей силой. Так как площадь крыльев и фюзеляжа много больше площади рулей, то F» Fр и вектор скорости снаряда будет разворачиваться в туже сторону, в которую отклонились рули.
. Строго говоря, алгебраическая сумма продольных составляющих Т2 – Fв п – Fр п не равна нулю, за счет чего происходит некоторое изменение модуля вектора скорости снаряда при разворотах последнего. Однако это изменение невелико и в дальнейшем учитываться не будет. Ось снаряда будет разворачиваться до тех пор, пока момент силы относительно центра масс не уравновесит момент силы . Равнодействующая поперечная сила F∑ = F – Fр+ Т1, приложенная к центру масс, и будет управляющей силой. Так как площадь крыльев и фюзеляжа много больше площади рулей, то F» Fр и вектор скорости снаряда будет разворачиваться в туже сторону, в которую отклонились рули.
Для крестокрылых снарядов механизм разворота в вертикальной плоскости аналогичен рассмотренному; следует лишь дополнительно учитывать проекцию силы тяжести снаряда на ось, перпендикулярную вектору скорости, лежащую в вертикальной плоскости.
При крестообразном расположении крыльев существуют две аэродинамические схемы ракет: обычная и типа «утка». В первом случае рулевые функции выполняет хвостовое оперение, во втором – рули размещаются в носовой части (подвижные управляющие крылья, неподвижное хвостовое оперение). У снарядов с аэродинамической симметрией для управления применяют декартову систему.
Для разворота в произвольной плоскости необходимо отклонить как рули курса, так и рули тангажа (рисунок 2.14,а). При этом появляется как угол скольжения  , так и угол атаки
, так и угол атаки  . При отсутствии крена (на рисунке 2.14,б показан ЛА в состоянии крена ) управление в боковой и вертикальной плоскостях осуществляется независимо друг от друга. При этом за счет угла атаки создается составляющая поперечного ускорения
. При отсутствии крена (на рисунке 2.14,б показан ЛА в состоянии крена ) управление в боковой и вертикальной плоскостях осуществляется независимо друг от друга. При этом за счет угла атаки создается составляющая поперечного ускорения  , лежащая в вертикальной плоскости, за счет угла скольжения – составляющая поперечного ускорения , лежащая в боковой плоскости, а полное поперечное ускорение равно их геометрической сумме: = + . Разворот снаряда будет происходить в плоскости, проходящей через векторы
, лежащая в вертикальной плоскости, за счет угла скольжения – составляющая поперечного ускорения , лежащая в боковой плоскости, а полное поперечное ускорение равно их геометрической сумме: = + . Разворот снаряда будет происходить в плоскости, проходящей через векторы  и . Такой тип рулевого управления называется декартовым, т.к.
и . Такой тип рулевого управления называется декартовым, т.к.
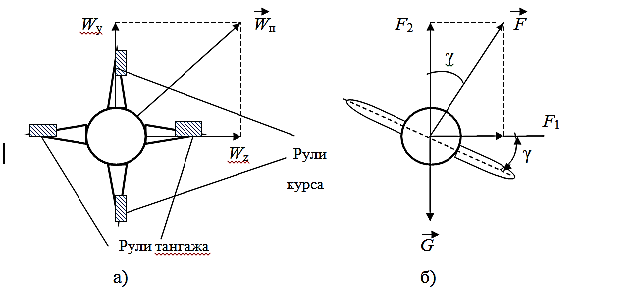
Рисунок 2.14 – Схемы управления разворотом
а) крестокрылого снаряда; б) плоскокрылого снаряда
управление осуществляется изменением декартовых составляющих вектора поперечного ускорения (рис.2.5).
Плоскокрылые снаряды (самолеты - снаряды) имеют одну пару сильно развитых крыльев (рисунок 2.12). Подобные снаряды применяются , например, для поражения наземных или надводных целей при запуске с самолета носителя (снаряды класса «Воздух-Поверхность»). Механика разворота в вертикальной плоскости такая как была рассмотрена выше. При развороте в горизонтальной плоскости, поскольку у снаряда нет вертикальных крыльев, необходимо с помощью элеронов осуществить крен снаряда на угол γ. В результате чего появится горизонтальная составляющая подъемной силы  , с помощью которой и будет создано нужное поперечное ускорение. При этом уменьшается вертикальная составляющая подъемной силы
, с помощью которой и будет создано нужное поперечное ускорение. При этом уменьшается вертикальная составляющая подъемной силы 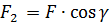 , которая при развороте без изменения высоты полета должна равняться весу снаряда G. Для компенсации уменьшения этой составляющей следует соответственно увеличить подъемную силу за счет отклонения рулей тангажа (увеличить угол атаки). Если не принять специальных мер, то поворот вектора скорости снаряда приведет к появлению угла скольжения, что в свою очередь увеличит лобовое сопротивление, а, следовательно, уменьшит скорость снаряда. Во избежание уменьшения скорости снаряда разворот плоскокрылого снаряда производят с нулевым углом скольжения (координированный разворот). Для этого с помощью рулей курса создают вращающий момент, заставляющий ось снаряда вращаться вслед за вектором скорости. Координированный разворот можно осуществлять также и в наклонной плоскости.
, которая при развороте без изменения высоты полета должна равняться весу снаряда G. Для компенсации уменьшения этой составляющей следует соответственно увеличить подъемную силу за счет отклонения рулей тангажа (увеличить угол атаки). Если не принять специальных мер, то поворот вектора скорости снаряда приведет к появлению угла скольжения, что в свою очередь увеличит лобовое сопротивление, а, следовательно, уменьшит скорость снаряда. Во избежание уменьшения скорости снаряда разворот плоскокрылого снаряда производят с нулевым углом скольжения (координированный разворот). Для этого с помощью рулей курса создают вращающий момент, заставляющий ось снаряда вращаться вслед за вектором скорости. Координированный разворот можно осуществлять также и в наклонной плоскости.
Так как при развороте плоскокрылого снаряда происходит управление полярными координарами вектора поперечного ускорения (рули тангажа меняют модуль вектора  а элероны - его направление), то такой тип рулевого управления называется полярным.
а элероны - его направление), то такой тип рулевого управления называется полярным.
Однако при самолетной компоновке ЛА – плоскокрылый снаряд (рис.2.12) может применяться и декартово рулевое управление.
Помимо рассмотренных, существуют и другие способы создания поперечного ускорения. Например, с помощью поворотных крыльев, газовых рулей. На некоторых типах снарядов применяют колеблющиеся рули, создающие вращающий момент, величина и направление которого зависят от среднего времени пребывания в том или другом крайнем положении.
При отсутствии атмосферы или малой ее плотности (а также при малой скорости полета) управление полетом осуществляется изменением силы тяги двигателя (двигателей). Применяемые при этом схемы рулевого управления весьма разнообразны.
Рассмотрим кратко наиболее типичную из них. В такой схеме
модуль требуемого ускорения создается одним двигателем, жестко
связанным с летательным аппаратом и называемым главным или маршевым
двигателем. Придание вектору требуемого направления осуществляется путем соответствующей ориентации корпуса аппарата. При управлении баллистическими ракетами дальнего действия и ракетами-носителями космических аппаратов маршевый двигатель обычно работает в течение нескольких минут непрерывно, а затем выключается и сбрасывается (полярное управление).
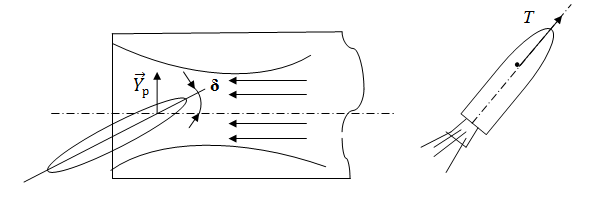
Рисунок 2.15 – Управление маршевым двигателем
При этом в течение работы двигателя управление ориентацией может осуществляться с помощью газовых рулей. Эти рули изготавливаются из
жаропрочных материалов и устанавливаются в струе газов, вытекающих из сопла маршевого двигателя (рисунок 2.15). При повороте руля на некоторый угол δ, газовая струя создает газодинамическую силу  , поворачивающую корпус ракеты вокруг ее центра масс. Кроме того, может поворачиваться камера сгорания и сопла реактивного двигателя.
, поворачивающую корпус ракеты вокруг ее центра масс. Кроме того, может поворачиваться камера сгорания и сопла реактивного двигателя.
В качестве рулей также могут использоваться рулевые или корректирующие двигатели.
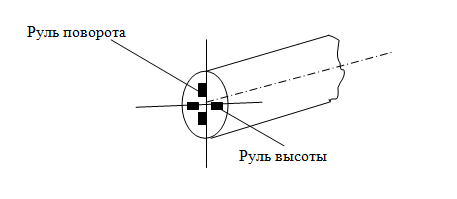
Рисунок 2.16 – Расположение газовых рулей
Рисунок 2.17 – Расположение взаимно перпендикулярно ориентированных корректирующих двигателей (декартово управление)
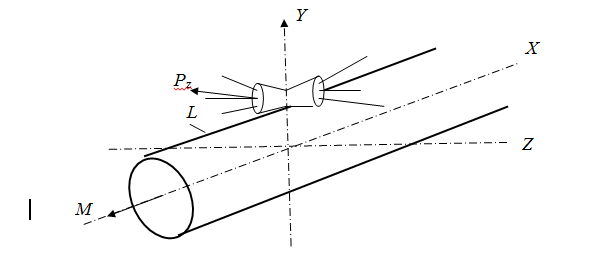
Рисунок 2.18 – Расположение специальных микродвигателей
Для изменения ориентации микродвигатели создают силу Pz, линия действия которой не проходит через центр масс. С ее помощью момент силы вращения М разворачивает аппарат, L – плечо.
При управлении космическими аппаратами с целью экономии топлива управление полетом осуществляется обычно путем всего нескольких сравнительно кратковременных включений маршевого двигателя. При этом для упрощения двигателя величина его силы тяги обычно не имеет плавной регулировки, т. е. двигатель может работать только в режиме «включено—выключено». В этом случае управление полетом осуществляется не путем
регулирования величины ускорения , а путем включения и выключения
двигателя в соответствующие моменты времени, например, в следующей
последовательности. На основании данных информационно-измерительного устройства системы управления ЛА управляющее устройство определяет требуемое изменение  вектора скорости трогания аппарата. Затем корпус аппарата поворачивается вокруг центра масс таким образом, чтобы после включения маршевого двигателя сила его тяги
вектора скорости трогания аппарата. Затем корпус аппарата поворачивается вокруг центра масс таким образом, чтобы после включения маршевого двигателя сила его тяги  совпадала по направлению с вектором . Затем включается маршевый двигатель, создающий постоянное ускорение , и происходит изменение вектора скорости аппарата по закону
совпадала по направлению с вектором . Затем включается маршевый двигатель, создающий постоянное ускорение , и происходит изменение вектора скорости аппарата по закону  =
=  t . Когда это изменение достигает требуемой величины
t . Когда это изменение достигает требуемой величины  маршевый двигатель выключается. Поскольку развороты корпуса происходят при выключенном маршевом двигателе, они осуществляются с помощью дополнительных малогабаритных двигателей, называемых двигателями ориентации. В качестве таких двигателей применяются малогабаритные реактивные двигатели, вектор тяги которых не проходит через центр масс аппарата (рис.2.18), или маховики (вращающиеся массы).
маршевый двигатель выключается. Поскольку развороты корпуса происходят при выключенном маршевом двигателе, они осуществляются с помощью дополнительных малогабаритных двигателей, называемых двигателями ориентации. В качестве таких двигателей применяются малогабаритные реактивные двигатели, вектор тяги которых не проходит через центр масс аппарата (рис.2.18), или маховики (вращающиеся массы).
Дата добавления: 2017-09-01; просмотров: 3264;
Поиск по сайту
Узнать еще
- CRM - стратегия управления взаимоотношениями с клиентом
- I. Политический режим: понятие, сущность и основные типы.
- I. Понятие и типы политических партий.
- II. В сравнении с другими органами управления, функционирующих на профессиональной основе
- II. Типы политических лидеров.
- VI. ЩЕЛЕВЫЕ И СПЕЦИАЛЬНЫЕ ТИПЫ АНТЕНН
- А) Типы и конструктивные особенности баз.
- А. Клинические типы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
