Сравнительные характеристики координаторов самонаведения. Тенденции развития техники самонаведения
Системы самонаведения, как нам уже известно, принято классифицировать по типу используемых физических величин для определения положения целей.
В последние годы принято выделять следующие типы систем самонаведения:
- инерциальные
- астронавигационные
- использующие спутниковую навигацию
- радиолокационные
- активная радиолокационная ГСН
- полуактивная радиолокационная ГСН
- пассивная радиолокационная ГСН
- радиолокационная с коррекцией по пеленгу на радиомаяки
- радиолокационная с коррекцией по рельефу местности
- инфракрасные (тепловые) ГСН
- I поколения
- II поколения
- III поколения
- IV поколения
- ультрафиолетовые ГСН
- оптические (телевизионные) ГСН
- лазерные ГСН
- акустические ГСН (применяются в торпедах)
- магнитные
- электростатические
Эта классификация более подробная, чем приведенная в подразделе 7.1.
Последние из перечисленных систем в литературе не описаны, хотя упоминается возможность их применения.
Практически дело сводится к тому, что управляемый объект должен двигаться в потенциальном поле (электростатическое поле и поле земного тяготения) в направлении вектора поля, а в вихревом поле — по нормали к вектору поля. Что касается гравитационного поля (поле силы тяжести), то каждое падающее на землю тело является „самонаводящимся". Возможности технического использования сил притяжения других небесных тел на ближайшее время, по-видимому, перспективы не имеют. В электрическом и магнитных полях в отличие от поля тяготения силы притяжения столь малы, что практически не способны оказать прямого воздействия на управляемый объект. Для использования этих полей нужны высокочувствительные приборы, но до настоящего времени видимо еще не найдено практического решения вопроса.
В нашу задачу не входит изучение практической реализации координаторов самонаведения (следящих угломеров, дальномеров, измерителей скорости движущихся объектов), осуществляющих процесс наведения. Вы должны знать этот материал из курса «Радиолокационные системы». Остановимся на их особенностях очень коротко.
Упрощенная структурная схема теплового инфракрасного координатора (ИКГСН) показана на рисунке 7.16. Тепловая энергия, излучаемая целью (в основном ее двигателями), попадает в линзовую или зеркальную оптическую систему, которая фокусирует лучистый поток и направляет его на чувствительный элемент. Между оптической системой и чувствительным элементом помещается подвижная шторка или вращающийся диск со сложным растром (штриховкой), который модулирует лучистый поток по интенсивности в соответствии с угловым рассогласованием направления на источник излучения и осью координатора. Модулирующий диск – обычно металлическая или стеклянная пластина с рядом прозрачных и непрозрачных для ИК лучей полос. Диск вращается с постоянной скоростью Ω.
 Пример диска
Пример диска
| Привод |
Оптическая система
| Усили-тель, фильтры |
| Чувстви-тельный элемент |
| Коммута-тор |


Ω
Рисунок 7.16 – Упрощенная схема теплового координатора
При этом ток или напряжение на выходе чувствительного элемента оказываются функционально связанными с угловым рассогласованием. Этот ток (напряжение) подается на блок разделения (коммутатор) сигнала ошибки на азимутальную и угломестную составляющие, которые далее используются как команды управления по курсу и тангажу. В качестве чувствительных элементов в тепловых координаторах используются термоэлектрические устройства (термоэлементы, болометры, термисторы) и фотоэлектрические устройства (фотоэлементы, фотосопротивления, фотодиоды, фототриоды).
Очень часто оптическая ось делается подвижной, а сама оптическая система может перемещаться в двух плоскостях и сопровождать цель при ее движении. Оптическая система с модулирующим диском и ПРМ (чувствительным элементом) помещают в специальный карданный подвес. Сигнал с выхода разделителя координат поступает на вход привода. Привод стремиться повернуть оптическую систему с приемником так, чтобы сигнал с ПРМ исчез, что соответствует направлению оптической оси на цель. Движение цели вызывает непрерывный уход ее изображения от оптической оси, вследствие чего возникает новый угол рассогласования  . При стремлении «догнать» изображение цели за время
. При стремлении «догнать» изображение цели за время  привод должен разворачивать оптику с угловой скоростью
привод должен разворачивать оптику с угловой скоростью  , т.е. с угловой скоростью линии визирования. В качестве привода могут быть использованы электродвигатели, а в качестве датчиков угловых скоростей – тахогегераторы. В современных следящих головках электродвигатели мало применяют из-за их инерционности. Кроме того, головки с моторным приводом выдают сигнал
, т.е. с угловой скоростью линии визирования. В качестве привода могут быть использованы электродвигатели, а в качестве датчиков угловых скоростей – тахогегераторы. В современных следящих головках электродвигатели мало применяют из-за их инерционности. Кроме того, головки с моторным приводом выдают сигнал  , содержащий производную колебаний снаряда относительно его центра тяжести. Эта составляющая вносит ошибку в наведение. Для устранения ошибки необходимо или вычитать составляющую колебаний снаряда, или же стабилизировать всю систему самонаведения. Поэтому в современных следящих головках в качестве приводов используют гиромоторы. Действие гироскопической следящей системы основано на свойстве трехстепенного гироскопа. Наиболее просто гироскоп можно использовать в качестве привода головки СН, если координатор или оптическую систему его жестко связать с ротором или с внутренней рамкой гироскопа.
, содержащий производную колебаний снаряда относительно его центра тяжести. Эта составляющая вносит ошибку в наведение. Для устранения ошибки необходимо или вычитать составляющую колебаний снаряда, или же стабилизировать всю систему самонаведения. Поэтому в современных следящих головках в качестве приводов используют гиромоторы. Действие гироскопической следящей системы основано на свойстве трехстепенного гироскопа. Наиболее просто гироскоп можно использовать в качестве привода головки СН, если координатор или оптическую систему его жестко связать с ротором или с внутренней рамкой гироскопа.
Дальность действия тепловых координаторов определяется интенсивностью теплового излучения цели, затуханием при распространении и параметрами чувствительного элемента.
Используемый диапазон инфракрасных волн подразделяют на следующие поддиапазоны:
0,76÷1,6 мк – ближняя инфракрасная (ИК) область, используется для целей связи;
1,5÷5,0 мк – промежуточная ИК область, используется для обнаружения «горячих» целей: самолетов, баллистических ракет и др.
8,5÷13 мк – далекая ИК область; в этом поддиапазоне дают максимум излучения «холодные» цели, например, корабли.

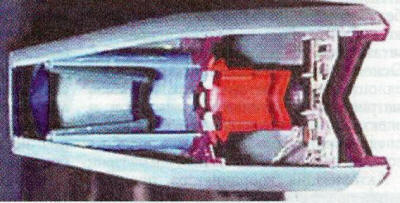
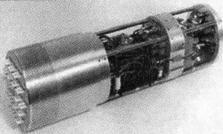
Рисунок 7.17 – Тепловые головки самонаведения 60ТИ,75Т
Тепловая головка самонаведения 60ТИ предназначена для комплектации
авиационных ракет Р60 типа «воздух-воздух», которые используются
на самолетах Су-15,Су-17,Су-22, Су-25, Су-27, МиГ-21, МиГ-23, МиГ-25, МиГ-29.
Тепловая головка самонаведения 75Т предназначена для комплектации
авиационных ракет Р60, Р62М типа «воздух-воздух», которые используются
на самолетах Су-15,Су-17,Су-22,Су-25, Су-27, МиГ-21, МиГ-23, МиГ-25, МиГ-29
Следует отметить, что из-за сложной конфигурации целей пространственное распределение ИК излучения оказывается очень неравномерным.
Принцип работы ультрафиолетовой головки СН аналогичен принципу работы инфракрасной ГСН, при том отличии, что используются волны значительно меньшей длины. Это позволяет распознавать значительное количество тепловых ловушек для ИК-наводящихся ракет, однако уменьшает дальность обнаружения/захвата цели и вводит зависимость от погодных условий.
Оптические координаторы отличаются от тепловых по существу лишь типом чувствительного элемента. Если в оптических приборах могут применяться газонаполненные фотоэлементы и стеклянная оптика, то для инфракрасных приборов необходимы специальные элементы (с охлаждением) и специальная оптика. Конструкции приборов, действующих в области инфракрасных частот, разработаны лучше, чем приборов, работающих в световом диапазоне частот. Это обусловливалось прежде всего тем, что инфракрасные приборы имеют более универсальное применение.. Описание оптических и инфракрасных приборов самонаведения обеих категорий может быть дано совместно, так как их области частот следуют друг за другом и, кроме того, в конструктивном оформлении они не имеют принципиальных отличий.
Лазерные ГСН могут работать в активном режиме. Малая длина волны излучения оптического диапазона приводит к качественному отличию оптической локации от радиолокации. Применение лазеров позволяет формировать узкую диаграмму направленности излучения (~10-3 рад) при относительно небольших диаметрах коллимирующей[1] оптики, что обеспечивает большую точность определения угловых координат объектов, распознавания их формы и высокую помехозащищенность.
Луч лазера, пройдя через коллиматор, системой зеркал направляется на объект. Отраженный от объекта луч улавливается плоским зеркалом и направляется на параболическое зеркало, с которого поступает одновременно на диссектор [2](матрицу фотоприемника) - для определения угловых координат и на фотоэлектронный умножитель (или иной детектор) - для определения дальности объекта. Электрические сигналы с диссектора подаются в следящую систему, управляющую положением передающей и приемной оптической систем локатора.
В оптические локационные системы встраивают цифровые вычислительные средства с целью реализации сложных алгоритмов статистической обработки сигнала, распознавания образов, реализации программы адаптации оптических локационных систем, работающих при существенно изменяющихся условиях эксплуатации, преобразования координат из одной системы в другую.

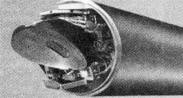
Рисунок 7.18 - Полуактивная лазерная головка 24Н1
Используется для наведения ракеты на наземную цель, подсвечиваемую оптическим квантовым генератором бортовой станции подсвета
Рассмотрим в качестве примера особенности действия одной из оптических систем - схему боевого применения оперативно-тактической ракеты с оптической головкой самонаведения (рисунок 7.19). Спутник оптической разведки (1) или самолет-разведчик (2) делают снимок предполагаемого места стационарной цели (3), после чего изображение передается на КП (4) для идентификации цели; затем изображение участка местности оцифровывается с обозначением места цели (5), после чего оно вводится в бортовую ЭВМ головной части тактической ракеты (6); пусковая установка (7) осуществляет запуск.

Рисунок 7.19 - Схема боевого применения оперативно-тактической ракеты
с оптической головкой самонаведения
После активного участка полета головная часть ракеты отделяется (8) и летит по баллистической траектории, затем по данным инерциальной системы и высотомера включается оптическая головка самонаведения, которая сканирует местность (9) и после идентификации изображения с цифровым эталоном (10) наводится на цель с помощью аэродинамических рулей и поражает ее.
Остановимся на комплексной системе наведения «Искандер».


Рисунок 7.20 - Автономная корреляционно-экстремальная оптическая головка самонаведения (ГСН) "Искандер"
Для вывода ракеты на цель в этой системе используется инерциальная система управления, цель впоследствии захватывается корреляционно-экстремальной оптической головкой самонаведения (ГСН). Принцип действия системы самонаведения ракеты основан на формировании оптической аппаратурой ГСН изображения местности в районе цели. Это изображение бортовая ЭВМ сравнивает с введенным в нее при подготовке ракеты к пуску эталоном. Оптическая головка самонаведения отличается повышенной чувствительностью и устойчивостью к существующим средствам радиоэлектронной борьбы, что позволяет производить пуски ракет в безлунные ночи без дополнительной природной подсветки и поражать подвижную цель с погрешностью плюс-минус два метра. В настоящее время такую задачу, кроме ОТРК "Искандер", не может решить ни одна другая аналогичная ракетная система в мире.
Характерно то, что используемая в ракете оптическая система самонаведения не нуждается в корректирующих сигналах космических радионавигационных систем, которые в кризисных ситуация могут быть выведены из строя радиопомехами или просто выключены. Комплексное использование инерциальной системы управления с аппаратурой спутниковой навигации и оптической ГСН позволили создать ракету, поражающую заданную цель почти в любых возможных условиях.
Ракеты с телевизионной головкой СН предназначены для систем повышенной дальности. Они передают телевизионное изображения цели с телевизионной головки (ТВГСН) на индикатор в кабине самолета. Предназначены для поражения трудноуязвимых наземных и надводных (корабли водоизмещением до 5000-10000 т) целей в светлое время суток в простых метеоусловиях. Система наведения пассивная телевизионная, реализует комбинированный метод управления на участках дальнего и ближнего СН после захвата цели. В исходном положении крепится на подвеске под самолетом-носителем.
Поясним теперь особенности акустической головки самонаведения. У акустических приборов существенное значение имеет тот недостаток, что звук обладает малой скоростью распространения, особенно в атмосфере. Кроме того, создаваемые управляемым объектом звуковые помехи (например, шум двигателя и шумы обтекания) устраняются с большим трудом, а часто этого и вовсе нельзя добиться. Поэтому акустическая головка самонаведения предназначается для наведения на цель подводных торпед. В качестве чувствительных элементов головка имеет два магнитострикционных вибратора, которые устанавливаются в головной части торпеды. Напряжение низкой частоты, созданное в чувствительных элементах под воздействием исходящих от винта корабля-цели звуковых волн, усиливается и выпрямляется. Сигнал управления, полученный сравнением выходных величин отдельных каналов, воздействует непосредственно на управляющий орган (руль направления) торпеды. С его помощью торпеда наводится на цель по кривой погони с задней полусферы (следовательно, на винты).
Повышение тактико-технических требований и усложнение условий работы обусловливают применение в современных ГСН новейших достижений микроэлектроники, использование все более сложных структур излучаемых сигналов (импульсных, непрерывных, квазинепрерывных, сигналов с внутренними модуляциями) и совершенствование их обработки с применением цифровых методов на основе микропроцессоров.
Основными направлениями совершенствования следящих координаторов в настоящее время определены:
1)Создание тепловизионных ГСН, работающих в нескольких участках ИК-диапазона длин волн, в том числе с не требующими глубокого охлаждения оптическими приемниками; практическое применение активных лазерных локационных устройств; внедрение активно-пассивных радиолокационных ГСН с плоской или конформной антенной; создание многоканальных комбинированных ГСН.
В инфракрасных ГСН оптический приемник состоял из одного или нескольких чувствительных элементов, что не позволяло получать полноценную сигнатуру цели. Тепловизионные ГСН работают на качественно более высоком уровне. В них используются многоэлементные оптические приемники (ОП), представляющие собой матрицу из чувствительных элементов, размещаемых в фокальной плоскости оптической системы. Для считывания информации с таких приемников применяется специальное оптико-электронное устройство, определяющее координаты соответствующей части проецируемого на ОП отображения цели по номеру подвергшегося экспозиции чувствительного элемента с последующими усилением, модуляцией получаемых входных сигналов и передачей их в вычислительный блок. Наибольшее распространение получили считывающие устройства с цифровой обработкой изображения и применением волоконной оптики.
Основными преимуществами тепловизионных ГСН являются значительное поле обзора в режиме сканирования, составляющее ± 90° (у инфракрасных ГСН с четырех - восьмиэлементными ОП не более ± 75°) и увеличенная максимальная дальность захвата цели (5-7 и 10-15 км соответственно). Кроме того, возможна работа в нескольких участках ИК-диапазона, а также реализация режимов автоматических распознавания цели и выбора точки прицеливания, в том числе в сложных метеоусловиях и ночью. Использование матричного ОП снижает вероятность одновременного поражения всех чувствительных элементов активными системами противодействия.
Впервые полностью автоматической (не требующей корректирующих команд оператора) тепловизионной ГСН оснащены американские УР класса «воздух - земля» AGM-65D «Мейверик» средней и AGM-158A JASSM большой дальности.
Тепловизионные координаторы цели применяются также в составе управляемых авиационных бомб (УАБ). Например, в УАБ GBU-15 используется полуавтоматическая тепловизионная система наведения.
В целях существенного снижения стоимости таких устройств в интересах их массового применения в составе серийно выпускаемых УАБ типа JDAM американскими специалистами был разработан тепловизионный координатор цели (ТКЦ) «Дамаск». Он предназначен для обнаружения, распознавания цели и коррекции конечного участка траектории УАБ. Данное устройство, выполненное без следящего привода, жестко фиксируется в носовой части бомб и использует штатный источник питания авиабомбы. Основными элементами ТКЦ являются оптическая система, неохлаждаемая матрица чувствительных элементов и электронно-вычислительный блок, обеспечивающие формирование и преобразование изображения.
|
| Тепловизионный координатор цели «Дамаск» |
 
|
| Тепловизионные устройства с неохлаждаемыми приемниками: А - фиксированный координатор для применения в корреляционных системах коррекции; Б — следящий координатор; В - камера системы воздушной разведки |
Рисунок 7.21 – Тепловизионные системы СН
· Активизация координатора производится после сброса УАБ на дальности до цели около 2 км. Автоматический анализ поступающей информации осуществляется в течение 1-2 с со скоростью смены изображения района цели 30 кадр/с. Для распознавания цели применяются корреляционно-экстремальные алгоритмы сравнения получаемого в инфракрасном диапазоне изображения с переведенными в цифровой формат снимками заданных объектов. Они могут быть получены в ходе предварительной подготовки полетного задания с разведывательных спутников или летательных аппаратов, а также непосредственно с использованием бортовых устройств.
· В первом случае данные целеуказания вводятся в УАБ во время предполетной подготовки, во втором - от самолетных РЛС или ИК-станции, информация от которых поступает на индикатор тактической обстановки в кабине экипажа. После обнаружения и идентификации цели производится коррекция данных СУ Далее управление осуществляется в обычном режиме без использования координатора. При этом точность бомбометания (КВО) не хуже 3 м.
· Аналогичные исследования с целью разработки относительно дешевых тепловизионных координаторов с неохлаждаемыми оптическими приемниками (ОП) проводятся рядом других ведущих фирм.
· Такие ОП намечено использовать в ГСН, корреляционных системах коррекции и воздушной разведки. Чувствительные элементы матрицы ОП выполнены на основе интерметаллических (кадмия, ртути и теллура) и полупроводниковых (антимонид индия) соединений.
2) К перспективным оптоэлектронным системам самонаведения относится также активная лазерная ГСН, разрабатываемая фирмой «Локхид-Мартин» для оснащения перспективных УР и автономных боеприпасов.
Например, в составе ГСН экспериментального автономного авиационного боеприпаса LOCAAS применялась лазерная локационная станция (ЛЛС), обеспечивающая обнаружение и распознавание целей путем трехмерной высокоточной съемки участков местности и находящихся на них объектов. Для получения трехмерного образа цели без ее сканирования применяется принцип интерферометрии отраженного сигнала. В конструкции ЛЛС используется генератор импульсов лазерного излучения (длина волны 1,54 мкм, частота повторения импульсов 10 Гц-2 кГц, длительность 10-20 не), а в качестве приемника - матрица чувствительных элементов с зарядовой связью. В отличие от прототипов ЛЛС, имевших растровую развертку сканирующего луча, у этой станции больший (до ± 20°) угол обзора, меньшая дисторсия[3] изображения и значительная пиковая мощность излучения. Она сопрягается с аппаратурой автоматического распознавания целей по заложенным в память бортовой ЭВМ сигнатурам[4] до 50 тыс. типовых объектов.
Во время полета боеприпаса ЛЛС может осуществлять поиск цели в полосе земной поверхности шириной 750 м по курсу полета, а в режиме распознавания эта зона уменьшится до 100 м. При одновременном обнаружении нескольких целей алгоритм обработки изображений обеспечит возможность атаки наиболее приоритетной из них.
· По мнению американских специалистов, оснащение ВВС США авиационными боеприпасами с активными лазерными системами, обеспечивающими автоматические обнаружение и распознавание целей с последующим их высокоточным поражением, станет качественно новым шагом в области автоматизации и будет способствовать повышению эффективности нанесения воздушных ударов в ходе ведения боевых действий на ТВД.
3) Радиолокационные ГСН современных управляемых ракет (УР) применяются, как правило, в системах наведения авиационного оружия средней и большой дальности. Активные и полуактивные ГСН используются в УР класса «воздух - воздух» и противокорабельных ракетах, пассивные ГСН- в ПРР. Перспективные УР, в том числе комбинированные (универсальные), предназначенные для поражения наземных и воздушных целей (класса «воздух - воздух - земля»), планируется оснащать радиолокационными ГСН с плоскими или конформными фазированными антенными решетками, выполненными с применением технологий визуализизации и цифровой обработки инверсной сигнатуры цели.

| 
|
Рисунок 7.22 – Радиолокационная головка СН с плоской фазированной антенной решеткой
Считается, что основными преимуществами ГСН с плоскими и конформными антенными решетками по сравнению с современными координаторами являются: более эффективная адаптивная отстройка от естественных и организованных помех; электронное управление лучом диаграммы направленности с полным отказом от применения подвижных частей со значительным снижением массогабаритных характеристик и потребляемой мощности; более эффективное использование поляриметрического режима и доплеровского обужения луча; увеличение несущих частот (до 35 ГГц) и разрешающей способности, апертуры и поля обзора; снижение влияния свойств радиолокационной проводимости и теплопроводности обтекателя, вызывающих аберрацию и дисторсию сигнала. В таких ГСН возможно также применение режимов адаптивной настройки равносигнальной зоны с автоматической стабилизацией характеристик диаграммы направленности.
4) Одним из направлений совершенствования следящих координаторов является создание многоканальных активно-пассивных ГСН, например тепловизионно-радиолокационных или тепловизионно-лазерно-радиолокационных. В их конструкции для уменьшения массогабаритных показателей и стоимости систему сопровождения цели (с гироскопической или электронной стабилизацией координатора) планируется использовать только в одном канале.
| 
|
Рисунок 7.23 - Опытные образцы комбинированных активно-пассивных ГСН:
слева - радиолокационно-тепловизионная гиростабилизированная ГСН для перспективных ракет классов «воздух - земля» и «воздух - воздух»;
справа - активная радиолокационная ГСН с фазированной антенной решеткой и пассивным тепловизионным каналом
В остальных ГСН будут применяться фиксированные излучатель и приемник энергии, а для изменения угла визирования намечено задействовать альтернативные технические решения, например, в тепловизионном канале - микромеханическое устройство точной юстировки линз, а в радиолокационном - электронное сканирование луча диаграммы направленности.
Комбинированной ГСН с полуактивным лазерным, тепловизионным и активным радиолокационным каналами намечено оснастить перспективную УР JCM. Конструктивно оптоэлектронный блок приемников ГСН и радиолокационная антенна выполнены в единой следящей системе, что обеспечивает их раздельную или совместную работу в процессе наведения. В данной ГСН реализован принцип комбинированного самонаведении в зависимости от типа цели (тепло- или радиоконтрастная) и условий обстановки, в соответствии с которыми автоматически выбирается оптимальный метод наведения в одном из режимов работы ГСН, а остальные задействуются параллельно для формирования контрастного отображения цели при расчете точки прицеливания.
При создании аппаратуры наведения перспективных УР фирмы «Локхид-Мартин» и «Боинг» предполагают использовать имеющиеся технологические и технические решения, полученные в ходе работ по программам LOCAAS и JCM. В частности, в составе разрабатываемых УР SMACM и LCMCM предложено применять различные варианты модернизированной ГСН, установленной на УР AGM-169 класса «воздух- земля». Поступление данных ракет на вооружение ожидается не ранее 2012 года.
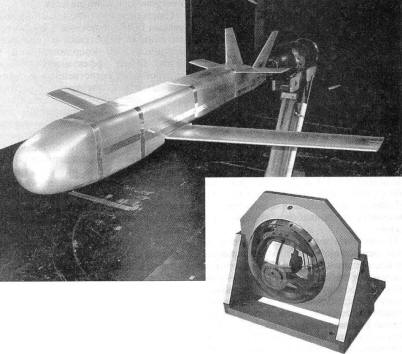
Рисунок 7.24 - Испытания в аэродинамической трубе разрабатываемой УР SMACM
(на рисунке справа ГСН ракеты)
Бортовая аппаратура системы наведения, комплектуемая этими JСИ, должна обеспечивать выполнение таких задач, как: патрулирование в назначенном районе в течение часа; разведка, обнаружение и поражение установленных целей. По мнению разработчиков, основными достоинствами подобных ГСН являются: повышенная помехозащищенность, обеспечение высокой вероятности попадания УР в цель, возможность применения в сложных помеховых и метеоусловиях, оптимизированные массогабаритные характеристики аппаратуры наведения, сравнительно невысокая стоимость.

[1] Коллиматор – оптическая система для получения пучка параллельных лучей
[2] Диссектор- преобразователь оптического сигнала в электрический
[3] Дисторсия – искривление из-за различия линейного увеличения разных частей изображения
[4] Сигнатура – обозначение, копия
| <== предыдущая лекция | | | следующая лекция ==> |
| Модель идеального перемешивания (МИП) | | | Магнитное поле и электрические токи в магнитостатике. |
Дата добавления: 2017-09-01; просмотров: 6706;
Поиск по сайту
Узнать еще
- Filariidae:. Onchocerca volvulus Систематика, морфология, цикл развития, патогенное действие, диагностика и профилактика онхоцеркоза и лоаоза.
- II. Завоевание Китая маньчжурами. Экономическое положение страны в XVII – начале XIX вв.: аграрная политика Цинской династии, особенности развития городского ремесла
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения
- II. Физические характеристики участников коммуникации
- III Всебелорусское собрание. Программа социально-экономического развития Республики Беларусь на 2006 – 2010 гг.
- IV. Внешние условия развития отрасли информационных технологий
- U – образные и рабочие характеристики синхронного двигателя
- U – образные характеристики синхронного генератора

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
