Связь входа и выхода
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
Цель любого управления – изменить состояние объекта нужным образом (в соответствии с заданием). Теория автоматического регулирования должна ответить на вопрос: «как построить регулятор, который может управлять данным объектом так, чтобы достичь цели?» Для этого разработчику необходимо знать, как система управления будет реагировать на разные воздействия, то есть нужна модель системы: объекта, привода, датчиков, каналов связи, возмущений, шумов.
Модель – это объект, который мы используем для изучения другого объекта (оригинала). Модель и оригинал должны быть в чем-то похожи, чтобы выводы, сделанные при изучении модели, можно было бы (с некоторой вероятностью) перенести на оригинал. Нас будут интересовать в первую очередь математические модели, выраженные в виде формул. Кроме того, в науке используются также описательные (словесные), графические, табличные и другие модели.
Связь входа и выхода
Любой объект взаимодействует с внешней средой с помощью входов и выходов. Входы – это возможные воздействия на объект, выходы – это те сигналы, которые можно измерить. Например, для электродвигателя входами могут быть напряжение питания и нагрузка, а выходами – частота вращения вала, температура.
Входы независимы, они «приходят» из внешней среды. При изменении информации на входе меняется внутреннее состояние объекта (так называют его изменяющиеся свойства) и, как следствие, выходы:
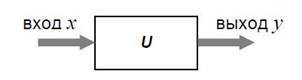
Рисунок 2.1 – Связь «вход-выход»
Это значит, что существует некоторое правило, по которому элемент преобразует вход x в выход y. Это правило называется оператором. Запись  означает, что выход y получен в результате применения оператора U ко входу x.
означает, что выход y получен в результате применения оператора U ко входу x.
Построить модель – это значит найти оператор, связывающий входы и выходы. С его помощью можно предсказать реакцию объекта на любой входной сигнал.
Рассмотрим электродвигатель постоянного тока. Вход этого объекта – это напряжение питания (в вольтах), выход – частота вращения (в оборотах в секунду). Будем считать, что при напряжении 1 В частота вращения равна 1 об/сек, а при напряжении 2 В – 2 об/сек, то есть частота вращения равна по величине напряжению. Легко видеть, что действие такого оператора можно записать в виде
 .
.
Теперь предположим, что этот же двигатель вращает колесо и в качестве выхода объекта мы выбрали число оборотов колеса относительно начального положения (в момент t = 0). В этом случае при равномерном вращении произведение x⋅Δt дает нам количество оборотов за время Δt, то есть  (здесь запись y(t) явно обозначает зависимость выхода от времени t). Можно ли считать, что этой формулой мы определили оператор U? Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Если напряжение на входе x(t) меняется (все равно как!), угол поворота запишется в виде интеграла
(здесь запись y(t) явно обозначает зависимость выхода от времени t). Можно ли считать, что этой формулой мы определили оператор U? Очевидно, что нет, потому что полученная зависимость справедлива только для постоянного входного сигнала. Если напряжение на входе x(t) меняется (все равно как!), угол поворота запишется в виде интеграла
 .
.
Оператор, который действует по такому правилу, называется оператором интегрирования. С помощью этого оператора можно, например, описать наполнение пустого бака водой. Если сечение бака S (в м2) постоянно по всей его высоте, то уровень воды h определяется как интеграл от потока воды q (в м3/с), деленный на S:
 .
.
Обратный оператор – оператор дифференцирования– вычисляет производную:
 .
.
Как мы увидим, этот оператор играет очень важную роль в описании объектов управления.
Обычно оператор дифференцирования обозначается буквой p. Запись  внешне выглядит как «умножение» оператора p на сигнал x(t) , но на самом деле обозначает действие этого оператора, то есть дифференцирование:
внешне выглядит как «умножение» оператора p на сигнал x(t) , но на самом деле обозначает действие этого оператора, то есть дифференцирование:
 . (1)
. (1)
Где встречаются такие операторы? Приведем примеры из электротехники. Например, известно, что ток i (в амперах), проходящий по цепи с конденсатором, пропорционален производной от разности потенциалов u (в вольтах) на его пластинах:
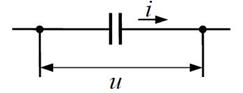
 .
.
Здесь C – емкость конденсатора (измеряется в фарадах). Кроме того, падение напряжения u на катушке индуктивности пропорционально производной от проходящего тока i:
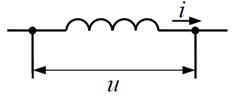
 ,
,
где L – индуктивность (измеряется в генри).
Оператор дифференцирования – это идеальный (физически нереализуемый) оператор, его невозможно реализовать на практике. Чтобы понять это вспомним, что при мгновенном изменении сигнала его производная (скорость возрастания) будет равна бесконечности, а никакое реальное устройство не может работать с бесконечными сигналами.
Построение модели
Во-первых, математические модели могут быть получены теоретически из законов физики(законы сохранения массы, энергии, импульса). Эти модели описывают внутренние связи в объекте и, как правило, наиболее точны.
Рассмотрим RLC-цепочку, то есть последовательное соединение резистора с сопротивлением R (в омах), катушки индуктивности с индуктивностью L и конденсатора с емкостью C.
Она может быть описана с помощью двух уравнений:
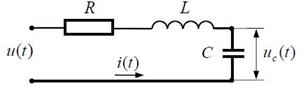
Первое уравнение означает, что разность потенциалов на концах RLC-цепочки равна сумме разностей потенциалов на всех промежуточных участках. Разность потенциалов R⋅i(t) на резисторе вычисляется по закону Ома, а на катушке – по формуле, приведенной в предыдущем параграфе. Второе уравнение описывает связь между напряжением и током для конденсатора. Вход этого объекта – напряжение u(t) на концах цепочки, а выход – разность потенциалов u (t) c на пластинах конденсатора.
Второй способ – построение модели в результате наблюдения за объектомпри различных входных сигналах (этим занимается теория идентификации). Объект рассматривается как «черный ящик», то есть, его внутреннее устройство неизвестно. Мы смотрим, как он реагирует на входные сигналы, и стараемся подстроить модель так, чтобы выходы модели и объекта совпадали как можно точнее при разнообразных входах.
На практике часто используется смешанный способ: структура модели (вид уравнения, связывающего вход и выход) определяется из теории, а коэффициенты находят опытным путем. Например, общий вид уравнений движения корабля хорошо известен, однако в этих уравнениях есть коэффициенты, которые зависят от многих факторов (формы корпуса, шероховатости поверхности и т.п.), так что их крайне сложно (или невозможно) найти теоретически. В этом случае для определения неизвестных коэффициентов строят масштабные модели и испытывают их в бассейнах по специальным методикам. В авиастроении для тех же целей используют аэродинамические трубы.
Для любого объекта управления можно построить множество различных моделей, которые будут учитывать (или не учитывать) те или иные факторы. Обычно на первом этапе стараются описать объект как можно более подробно, составить детальную модель. Однако при этом будет трудно теоретически рассчитать закон управления, который отвечает заданным требованиям к системе. Даже если мы сможем его рассчитать, он может оказаться слишком сложным для реализации или очень дорогим.
С другой стороны, можно упростить модель объекта, отбросив некоторые «детали», которые кажутся разработчику маловажными. Для упрощенной модели закон управления также получается проще, и с его помощью часто можно добиться желаемого результата. Однако в этом случае нет гарантии, что он будет так же хорошо управлять полной моделью (и реальным объектом).
Обычно используется компромиссный вариант. Начинают с простых моделей, стараясь спроектировать регулятор так, чтобы он «подходил» и для сложной модели. Это свойство называют робастностью (грубостью) регулятора (или системы), оно означает нечувствительность к ошибкам моделирования. Затем проверяют работу построенного закона управления на полной модели или на реальном объекте. Если получен отрицательный результат (простой регулятор «не работает»), усложняют модель, вводя в нее дополнительные подробности. И все начинается сначала.
Дата добавления: 2017-05-02; просмотров: 2195;
Поиск по сайту
Узнать еще
- C.) Опытным путем (по времени выхода забойной пачки).
- I. Ковалентная связь
- II. Обратная аффирентная связь. Понятие о РК.
- LI. СВЯЗЬ И СИГНАЛИЗАЦИЯ
- V. Водородная связь
- XXXVII. СИГНАЛИЗАЦИЯ И СВЯЗЬ НА ШАХТНОМ ТРАНСПОРТЕ И ПОДЪЕМЕ
- А - образец-пуансон с жесткой связью; б - термический цикл нагружения
- А. Усилители с двойной автотрансформаторной связью на биполярных транзисторах

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
