Модели и подходы к решению задачи
Процедура решения задачи основана на реализации двух этапов: идентификации решения  и последующем определении
и последующем определении  как функции от . На классе динамических систем (15) выделение частного решения в условиях неопределенности является непростой задачей. Для разделения решений в (18) проще всего идентифицировать на классе статических моделей, то есть искать зависимость
как функции от . На классе динамических систем (15) выделение частного решения в условиях неопределенности является непростой задачей. Для разделения решений в (18) проще всего идентифицировать на классе статических моделей, то есть искать зависимость  . Структура модели для оценивания во многом зависит от частотного спектра выхода
. Структура модели для оценивания во многом зависит от частотного спектра выхода  . Кроме этого, модель должна компенсировать динамическое запаздывание, присущее системе (15).
. Кроме этого, модель должна компенсировать динамическое запаздывание, присущее системе (15).
Изложим метод решения задачи на примере линейной устойчивой системы (15) второго порядка с одним входом и выходом. Обозначим  ;
;  . Пусть
. Пусть  ,
,  .
.
Предположим, что  можно представить в виде
можно представить в виде
 , (19)
, (19)
где  ,
,  ,
,  — множества, содержащие информацию о
— множества, содержащие информацию о  и
и  .
.
На множестве  будем оценивать частное решение системы (15). Так как
будем оценивать частное решение системы (15). Так как  , то для получения компоненты
, то для получения компоненты  вектора
вектора  воспользуемся операцией дифференцирования переменной
воспользуемся операцией дифференцирования переменной  . Обозначим
. Обозначим  .
.
Утверждение 1. Для идентификации на множестве можно применить модель

 , (20)
, (20)
где  — матрица параметров модели,
— матрица параметров модели,  .
.
На основе модели (20) на множестве определяем оценку частного решения  системы. Затем, зная , находим оценку общего решения
системы. Затем, зная , находим оценку общего решения

 ,
,
где  .
.
После получения вектора  строим отображение (информационный портрет)
строим отображение (информационный портрет)  на фазовой плоскости и определяем тип точки состояния равновесия.
на фазовой плоскости и определяем тип точки состояния равновесия.
Если множество не удается представить в виде (19), то предварительную оценку типа особой точки системы (15) можно получить следующим образом. Найдем частую производную
 .
.
Построим отображение  , которое назовем F-характеристикой системы (15). Для линейной системы (15) вектор
, которое назовем F-характеристикой системы (15). Для линейной системы (15) вектор  равен
равен
 . (21)
. (21)
и в зависимости от спектра  может содержать как экспоненты, так и вековые члены и синусоиды. Для удобства (21) будем называть F-системой.
может содержать как экспоненты, так и вековые члены и синусоиды. Для удобства (21) будем называть F-системой.
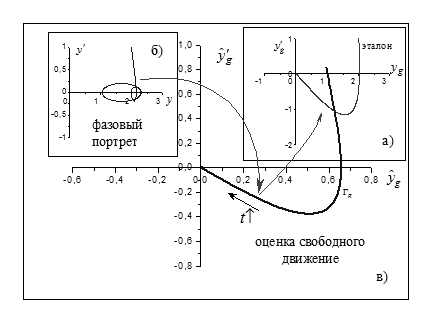
Рис. 2. Результаты идентификации типа состояния равновесия для линейной стационарной динамической системы второго порядка
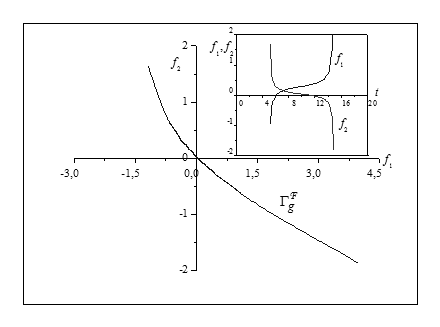
Рис. 3. F-характеристика линейной динамической системы второго порядка с 
Для линейной системы (15) второго порядка с синусоидальным входом результаты идентификации показаны на рис. 2, 3. Применим разработанный выше подход к идентификации состояния равновесия. Рис. 2 отражает результаты идентификации типа особой точки системы, когда собственные числа  . На рис. 2а показана реакция системы (15) на начальные условия при
. На рис. 2а показана реакция системы (15) на начальные условия при  , а на рис. 2б приведен фазовый портрет (15). На фазовой плоскости
, а на рис. 2б приведен фазовый портрет (15). На фазовой плоскости  (рис. 2в) представлена оценка свободного движения системы (15) с помощью предложенной выше процедуры идентификации общего решения. Из рисунка следует, что системе соответствует устойчивый узел.
(рис. 2в) представлена оценка свободного движения системы (15) с помощью предложенной выше процедуры идентификации общего решения. Из рисунка следует, что системе соответствует устойчивый узел.
Дата добавления: 2017-02-13; просмотров: 669;
Поиск по сайту
Узнать еще
- II. Основные задачи ГО
- II. Основные задачи службы торговли и питания
- NP-СЛОЖНЫЕ И ТРУДНОРЕШАЕМЫЕ ЗАДАЧИ
- NP-сложные и труднорешаемые задачи
- X. ситуационные задачи по 3 модулю
- А. Аналитические модели.
- А. Модели экономического прогноза на базе производственных функций.
- Автоматизация технологического проектирования. Основные задачи и модели автоматизации технологического проектирования

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
