Параметрические модели динамических систем
Параметрический подход является доминирующим в теории идентификации. Естественно, что параметрические модели применяются в адаптивных системах идентификации и управления. Широкое распространение параметрического подхода объясняется, во-первых, самим развитием теории автоматического управления, во-вторых, попыткой описать в виде моделей физические процессы, протекающие в объекте, в-третьих, алгоритмизацией исследуемых процессов.
Введение параметров в модель позволяет отразить структуру, организацию элементов в объекте, их взаимосвязь. О работоспособности объекта, прежде всего, судят по пределам изменения его параметров. И, наконец, только благодаря параметрическому представлению удалось решить задачу управления в условиях неопределенности.
Параметрический подход неразрывно связан с методами построения и реализации моделей, зависящих от параметров. Как правило, математическая модель строится для описания каких-либо процессов, протекающих в объекте, или изучения явлений различной природы. В теории автоматического управления математические модели отражают причинно-следственные связи между наблюдаемыми переменными в пространстве «вход-выход».
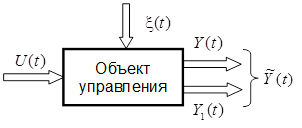
Рис. 1.1. Блок-схема объекта управления
Объект, рассматриваемый с точки зрения вход-выходных соотношений, обычно представляется в виде, показанном на рис. 1.1. Здесь  вектор наблюдаемых переменных, который для большинства объектов управления можно записать в виде [58]
вектор наблюдаемых переменных, который для большинства объектов управления можно записать в виде [58]
 ,
,
где  — непосредственный выход объекта,
— непосредственный выход объекта,  — вектор косвенных переменных, по которым можно судить о состоянии объекта,
— вектор косвенных переменных, по которым можно судить о состоянии объекта,
 .
.
Пространство входных переменных также можно разбить на два подмножества: управляющих переменных  и переменных
и переменных  (возмущений), изменяющихся по независимым от нас и в общем случае априори неизвестным причинам.
(возмущений), изменяющихся по независимым от нас и в общем случае априори неизвестным причинам.  отражает влияние внешней среды на объект и может носить случайный характер. Некоторые переменные из поддаются контролю (контролируемые возмущения) и используются для решения задач управления, другие являются вредными и по отношению к объекту могут рассматриваться как шум. В задачах идентификации предполагается, что влияние среды на объект проявляется в виде некоторого шума (помехи).
отражает влияние внешней среды на объект и может носить случайный характер. Некоторые переменные из поддаются контролю (контролируемые возмущения) и используются для решения задач управления, другие являются вредными и по отношению к объекту могут рассматриваться как шум. В задачах идентификации предполагается, что влияние среды на объект проявляется в виде некоторого шума (помехи).
Причинно-следственные связи в объекте на множестве экспериментальных данных  можно описать с помощью математической модели
можно описать с помощью математической модели
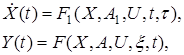 (1.2)
(1.2)
где  — вектор состояния,
— вектор состояния,  — некоторый интервал времени (временная задержка),
— некоторый интервал времени (временная задержка),  ,
,  — нелинейные операторы, структура которых известна с точностью до векторов неизвестных параметров
— нелинейные операторы, структура которых известна с точностью до векторов неизвестных параметров  ,
,  , принадлежащих ограниченной, но априори неизвестной области
, принадлежащих ограниченной, но априори неизвестной области  . Векторы
. Векторы  ,
,  могут быть постоянными или изменяться с течением времен
могут быть постоянными или изменяться с течением времен  неизвестным образом. Вектор
неизвестным образом. Вектор  в данной записи характеризует внутренней состояние объекта, а
в данной записи характеризует внутренней состояние объекта, а  является выходом.
является выходом.
Уравнение (1.2) представляет общую запись процессов, протекающих в объекте, в параметрической форме. Из (1.2) можно получить различные виды параметрических представлений за счет изменения или преобразования аргументов или вида операторов , . Данное представление справедливо как для динамических, так и статических объектов. Для динамических объектов из (1.2) можно получить модель в пространстве состояний. При этом первое уравнение описывает эволюцию внутреннего состояния объекта (модель состояния), а второе — процесс измерения (модель наблюдения). Рассмотрим некоторые частные случаи уравнения (1.2), которые соответствуют часто применяемым параметрическим моделям в системах управления.
Наиболее общим классом параметрических моделей являются динамические, которые можно разделить [10] на безынерционные и инерционные. Предлагаемая классификация основана на анализе и использовании информации  , наблюдаемой на некотором интервале
, наблюдаемой на некотором интервале  и наиболее полно соответствует проблеме идентификации. Обычно к динамическим относят модели, описывающие процессы, обладающие свойством инерционности. Под инерционностью понимают реакцию объекта на входное воздействие. В такой трактовке понятие инерционности (динамизма) ассоциируется с парой
и наиболее полно соответствует проблеме идентификации. Обычно к динамическим относят модели, описывающие процессы, обладающие свойством инерционности. Под инерционностью понимают реакцию объекта на входное воздействие. В такой трактовке понятие инерционности (динамизма) ассоциируется с парой  объекта. Безынерционные динамические модели включают в себя еще одну переменную — время, которое в некоторых случаях может выступать и как входная переменная, и как переменная, отражающая предысторию объекта. Учитывая приведенные рассуждения, динамическую модель можно представить следующим образом.
объекта. Безынерционные динамические модели включают в себя еще одну переменную — время, которое в некоторых случаях может выступать и как входная переменная, и как переменная, отражающая предысторию объекта. Учитывая приведенные рассуждения, динамическую модель можно представить следующим образом.
Введем переменную  и будем полагать, что
и будем полагать, что  . Тогда из уравнения (1.2) можно получить динамическое представление в пространстве
. Тогда из уравнения (1.2) можно получить динамическое представление в пространстве 
 , (1.3)
, (1.3)
где  .
.
Из (1.3) видно, что динамические свойства объекта могут определяться как собственно его внутренней структурой, так и динамическими свойствами входа  и помехи . Рассмотрим некоторые частные случаи (1.3).
и помехи . Рассмотрим некоторые частные случаи (1.3).
Дата добавления: 2017-02-13; просмотров: 1639;
Поиск по сайту
Узнать еще
- Arthropoda. Клещи. Систематика. Морфология. Медицинское значение.
- Arthropoda. Паукообразные. Систематика. Географическое распространение. Морфология. Скорпионы. Пауки. Медицинское значение.
- Arthropoda..Систематика.Насекомые.Морфология.Классификация.Медицинское значение.
- Arthropoda.Систематика.Блохи.Виды блох.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское и эпидемиологическое значение.Меры борьбы.
- Arthropoda.Систематика.Мошки,мокрецы,слепни,оводы.Географическое распространение.Морфология,развитие,патогенное действие.Медицинское значение,меры борьбы.
- Arthropoda.Систематика.Тараканы и мухи.Географическое распространение.Основные представители.Морфология,развитие,патогенное действие.Медицинское знаение.Меры борьбы.
- Cимпатическая нервная система. Центральный и периферический отдел симпатической нервной системы.
- Cистеми числення і способи переведення чисел із однієї системи числення в іншу

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
