Уравнения движения механизма
|
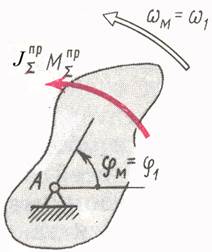 |
Выполнив приведение сил и масс, любой механизм с одной степенью свободы (рычажный, зубчатый, кулачковый и др.), сколь бы сложным он ни был, можно заменить его динамической моделью (рис. 7.1). Эта модель в общем случае имеет переменный приведенный момент инерции
 и к ней приложен суммарный приведенный момент
и к ней приложен суммарный приведенный момент  . Закон движения модели такой же, как и закон движения начального звена механизма (см. уравнение 7.1).
. Закон движения модели такой же, как и закон движения начального звена механизма (см. уравнение 7.1).
Основой для составления уравнения движения механизма с одной степенью свободы служит теорема об изменении кинетической энергии:
 (7.1)
(7.1)
Работу совершают все активные силы и моменты и силы трения во всех кинематических парах механизма.
Уравнение движения в энергетической форме. Запишем формулу для кинетической энергии модели, учитывая уравнение (7.1):
.  (7.2)
(7.2)
Так как вся нагрузка, приложенная к модели, выражается суммарным приведенным моментом  , то сумма работ равна
, то сумма работ равна
 (7.3)
(7.3)
Здесь переменная интегрирования  заменена координатой
заменена координатой  начального звена, так как
начального звена, так как 
Учитывая (5.16) и подставив выражения (7.2) и (7.3) в основное уравнение (7.1), получим уравнение движения в энергетической форме:
 (7.4)
(7.4)
где искомой величиной является угловая скорость  начального звена механизма. В общем случае верхний предел интегрирования в уравнении (7.4) считается переменным.
начального звена механизма. В общем случае верхний предел интегрирования в уравнении (7.4) считается переменным.
Если вся нагрузка, приложенная к механизму, зависит только от его положения, то и суммарный приведенный момент есть функция только координаты  . В этом случае уравнение (7.4) решается непосредственно относительно искомой величины :
. В этом случае уравнение (7.4) решается непосредственно относительно искомой величины :
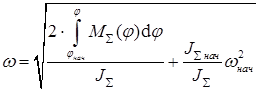 (7.5)
(7.5)
Укажем, что интеграл под корнем имеет знак, который надо учитывать.
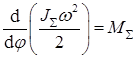
Уравнение движения в дифференциальной форме. Продифференцируем уравнение (7.4 по координате :
Определим производную, стоящую в левой части уравнения, помня, что в общем случае переменой величиной является не только угловая скорость , но и . Поэтому:

Откуда
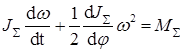 (7.6)
(7.6)
Это и есть уравнение движения в дифференциальной форме, поскольку искомая переменная величина — угловая скорость начального звена механизма - стоит под знаком производной. При пользовании уравнением (7.6) надо помнить, что суммарный приведенный момент , а также производная  суть величины алгебраические и подставляются со своими знаками.
суть величины алгебраические и подставляются со своими знаками.
В том случае, когда исследуется механизм, имеющий  (например, зубчатый механизм с круглыми колесами), уравнение его движения упрощается и приобретает такой вид:
(например, зубчатый механизм с круглыми колесами), уравнение его движения упрощается и приобретает такой вид:
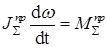 (7.7)
(7.7)
Уравнение движения в дифференциальной форме (7.6) может быть получено также и из уравнений Лагранжа II рода [2], [4].
Для определения углового ускорения  начального звена используем уравнение (7.6), решим его относительно
начального звена используем уравнение (7.6), решим его относительно  :
:
 (7.8)
(7.8)
Величины и  подставляются в уравнение (7.8) со своими знаками. Если угловое ускорение получится со знаком, противоположным знаку угловой скорости , то это значит, что начальное звено механизма движется замедленно.
подставляются в уравнение (7.8) со своими знаками. Если угловое ускорение получится со знаком, противоположным знаку угловой скорости , то это значит, что начальное звено механизма движется замедленно.
Производная подсчитывается или численным дифференцированием на ЭВМ, или графическим дифференцированием (см. § 4.2). Другой значительно более точный (но и более трудоемкий) способ определения производной можно найти в литературе
(см.: Минут С. Б. Об определении производной приведенного момента инерции массы звеньев механизма// Науч. тр. МВТУ им. Н. Э. Баумана, 1970; Зиновьев В. А., Бессонов А. П. Основы динамики машинных агрегатов. М., 1964).
Дата добавления: 2017-02-13; просмотров: 2322;
Поиск по сайту
Узнать еще
- I серия. ДВИЖЕНИЯ ВЫПОЛНЯЮТСЯ НА КОЛЕНЯХ.
- I.4.2 ОСНОВНОЙ ЗАКОН ДИНАМИКИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- I.4.3 РАБОТА. МОЩНОСТЬ. ЭНЕРГИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
- II серия. ДВИЖЕНИЯ ВЫПОЛНЯЮТСЯ СТОЯ.
- II. ОСНОВНЫЕ ПОЛОЖЕНИЯ И ДВИЖЕНИЯ
- II. Особенности развития турецкой буржуазии. Становление младотурецкого движения
- XVII век – “бунташный век”. Социальные движения в России в XVII веке. Раскол в русской православной церкви
- Абсолютное, относительное и переносное движения.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
