Общая функциональная схема и устройство САРП.
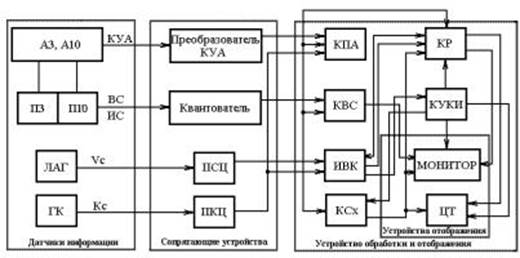
Большинство САРП состоит из датчиков информации, сопрягающих устройств и устройства обработки и отображения, являющегося индикатором ситуаций.
В качестве датчиков информации в САРП применяются одно или двухдиапазонные судовые РЛС, лаг и гирокомпас. Приведенная на рис двухдиапазонная РЛС состоит из антенны 3- и 10-сантиметрового диапазонов (А3, А10). От РЛС поступают следующие данные: текущее значение курсового угла антенны (КУА), видеосигналы (ВС) об окружающей обстановке и импульсы синхронизации (ИС). От лага (ЛГ) и гирокомпаса (ГК) поступает соответственно информация о скорости Vc и курсе Кс собственного судна.
В режиме автоматической радиолокационной прокладки (АРП) РЛС, выполняя обычные функции, является одновременно основным датчиком информации о наблюдаемой обстановке.
Импульсы синхронизации (ИС) в дальнейшем используются для синхронизации канала синхронизатора. Информация о курсовом угле антенны (КУА) после преобразования и кодирования используется в ряде трактов САРП.
Данные лага (ЛАГ) о скорости и гирокомпаса (ГК) о курсе судна после преобразований используются для формирования вектора скорости собственного судна, для вычисления навигационных параметров наблюдаемых целей. В некоторых типах САРП предусмотрена возможность ручного ввода данных о скорости судна (в случае отсутствия лага или выходе его из строя).
Если информация от датчиков поступает в аналоговой форме, то для ввода ее в цифровой процессор или вычислительную машину используются сопрягающие устройства, обеспечивающие преобразование данных в дискретную форму для ее дальнейшего кодирования, преобразования и ввода в цифровой процессор и другие тракты САРП.
Рассмотрим кратко назначение отдельных сопрягающих устройств.
Преобразователь курсового угла антенны (КУА) предназначен для преобразования углового положения антенны в последовательность импульсов или кодовую последовательность. Квантователь предназначен для квантования видеосигналов (КВС) по амплитуде и по времени (дальности). Квантование по амплитуде может быть двухуровневое (бинарное) или многоуровневое.
Интервал квантования по дальности выбирают таким образом, чтобы не загрублять разрешающую способность РЛС по дальности и в то же время обеспечивать надежное автосопровождение целей при различных метеоусловиях и заданную точность измерения навигационных параметров целей.
Преобразователи скорость-цифра(ПСЦ) и курс-цифра(ПКЦ) служат для преобразования аналоговых значений скорости и курса собственного судна в цифровую форму.
Если на судне применяются цифровые датчики курса и скорости судна, то предусмотрена возможность ввода информации от них непосредственно в устройство обработки и отображения.
Рассмотрим назначение отдельных трактов и каналов устройства обработки и отображения информации.
Информационно-вычислительный канал (ИВК) предназначен для приема, обработки, вычисления и хранения информации и выдачи ее в устройства отображения. Канал включает в себя специализированную ЭВМ или цифровой процессор, устройства связи с другими каналами и трактами, устройство кодирования, имитации и др.
Канал синхронизации (КСх) предназначен для синхронизации работы всех каналов системы. Сигналы синхронизатора обеспечивают согласование во времени работу процессоров, обработку и отображение информации. Тактовые и управляющие импульсы канала синхронизации управляют работой информационно-вычислительного канала и других каналов.
В канале видеосигналов (КВС) формируется видеосигнал, который смешивается с дополнительными импульсами и служебными метками и подается для отображения на монитор.
В канале пеленга антенны (КПА) формируется последовательность импульсов или кодовая последовательность, соответствующая текущему значению пеленга антенны.
Устройство отображения первичной и вторичной информации состоит из канала разверток (КР), канала управления, контроля и индикации (КУКИ), монитора и цифровых табло (ЦТ).
В большинстве САРП на мониторе устройства отображения совмещается отображение первичной информации об окружающей обстановке и вторичной – графической и цифровой.
На цифровых табло (ЦТ), как правило, отображается цифровая информация. Канал разверток (КР) формирует напряжения для отображения первичной информации, а также напряжения для отображения вторичной графической и цифровой информации.
Канал управления, контроля и индикации (КУКИ) предназначен для формирования сигналов управления работой системы и индикации положения органов управления, сигналов контроля, формирования команд управления и др.
КУКИ позволяет вести обмен информацией между оператором и САРП. С помощью органов управления и меню можно запросить нужную информацию: цифровой процессор выдает запрашиваемую информацию на экран монитора и цифровое табло.
Структурные схемы конкретных САРП могут отличаться от приведенной обобщенной схемы как по способу построения различных трактов, так и по их технической реализации.
Перечень навигационных параметров цели
Спомощью РЛС и средств автоматической радиолокационной прокладки (САРП) можно получить следующие параметры цели, представляющие важность для судоводителя:
•дистанцию до цели Dц;
•азимут на цель αц;
•координаты цели ϕц ,αц ;
•скорость движения цели υц;
•курс цели βц;
•ракурс цели γц;
•дистанцию кратчайшего сближения с целью Dкр;
•время кратчайшего сближения с целью tкр.
Все параметры могут быть как относительными, так и истинными. Параметры являются относительным и если определяются относительно местоположения собственного судна, на борту которого размещена РЛС.
При работе РЛС дистанция до цели Dц и азимут целиαц определяются относительно координат собственного судна, точнее, относительно координат антенны РЛС.
Если начало координат совместить с местоположением судна, ось Х ориентировать на N (север), а ось Y – на Е (восток), то можно получить относительные прямоугольные координаты цели из соотношения:
X ц= Dцsin αц,Yц= Dцcos xц.
Прямоугольные координаты могут быть преобразованы в геодезические координаты ϕц,отн , λц,отн.
Для определения истинных навигационных параметров цели должны быть известны параметры движения собственного судна: скорость и курс. Если геодезические координаты собственного судна ϕс , λс известны, то могут быть вычислены
геодезические координаты цели:
ϕц=ϕc+ϕц,отн,
λц= λc+ λц,отн.
Геодезические координаты собственного судна могут быть получены, в частности, путем радионавигационного определения координат места по сигналам ГЛОНАСС, GPS.
Для определения истинных параметров движения цели относительный вектор движения цели υц,ОД суммируется с
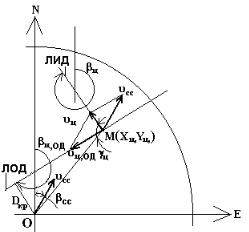
истинным вектором движения собственного судна υcc . Получаем истинную скорость целиυц и истинный курс целиβц.
Ракурс цели γ ц всегда определяется между вектором ис-
тинного движения цели и направлением на цель.
Дистанция кратчайшего сближения Dкр и время кратчайшего сближения tкр определяют степень предстоящей опасной ситуации с сближающейся встречной целью.
Ручной и автоматический режимы захвата целей
В САРП существуют два способа отбора целей. В режиме автоматического захвата в процессор поступают данные в зоне поиска, устанавливаемой оператором на экране индикатора САРП, в результате чего цели в зоне поиска отбираются для автосопровождения без участия судоводителя.
В режиме ручного захвата производится ручной отбор целей для автосопровождения как в зоне поиска, так и вне ее.
Независимо от выбранного режима захвата (автоматического или ручного), автосопровождение целей будет
продолжаться до тех пор, пока судоводитель не снимет цель с сопровождения или она не будет потеряна системой.
Хотя автоматический захват и снимает часть нагрузки с судоводителя, он может привести к избытку векторной информации на экране индикатора при большом количестве автосопровождаемых целей. В условиях интенсивного движения это затрудняет определение приоритетных параметров.
В режиме ручного захвата, несмотря на потерю времени, необходимого для захвата целей и сброса целей с сопровождения, будут отобраны именно те цели, которые действительно представляют интерес для судоводителя.
Именно наличие ручного захвата в САРП требует ИМО, хотя и допускает использование автоматического захвата, реализация которого в современных системах не представляет технических трудностей.
Ручной захват целей выполняется в пределах от 0,5 до 24 миль.
Автоматический захват производится в зоне поиска, параметры которой задаются оператором.
Количество сопровождаемых целей зависит от типа САРП
И примерно составляет
•в режиме ручного захвата – 20;
•в режиме автозахвата > 50.
При наличии значительных помех от волн и гидрометеоров либо при плавании вблизи берегов ручной захват предпочтительнее автоматического и его следует считать основным режимом захвата целей.
Автоматический захват применяется в открытом море при отсутствии гидрометеоров, а также при плавании вблизи берегов при условии введения линий запрета захвата.
При использовании автоматического захвата следует учитывать возможность наличия потенциально опасных целей за пределами линий запрета захвата. Поэтому в добавление к автоматическому режиму захвата целесообразно одновременно пользоваться и ручным захватом целей, находящихся за пределами линий запрета захвата.
Виды информации, представляемой на экране индикатора, звуковая и световая сигнализация
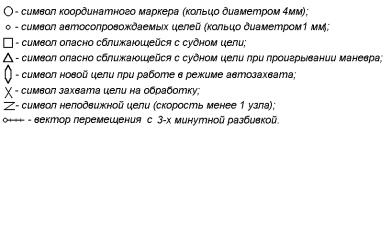
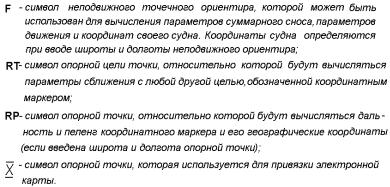
Вся информация, представляемая на экране индикатора, делится на буквенно-цифровую и символьно-графическую.
Буквенно-цифровая информация высвечивается на буквенно-цифровом табло (БЦТ) на периферии индикатора, символьно-графическая– на рабочем поле индикатора САРП в пределах его эффективного диаметра.
Символьно-графическая информация отображается на экране ЭЛТ автоматически или по вызову оператора.
В качестве примера ниже приводятся возможные виды символьно-графической информации, которые отображаются автоматически или вручную.
Символы, присваиваемые оператором авто сопровождаемым объектам, могут иметь такой вид:
На экране, кроме приведенной выше символьно графической информации о целях, воспроизводится радиолокационное изображение береговой черты.
В системе отображения предусмотрена возможность отображения прошлой траектории движения цели и своего судна (четыре равноразнесённые во времени прошлые местоположения, отмечаемые на экране кружочками). Временной интервал между кружочками задается в пределах от 10 до 180 с.
В САРП предусмотрена световая и звуковая сигнализации:
• об опасно сближающихся целях в случае, когда значения Dкр, и tкр какой-либо сопровождаемой цели становится меньше допустимых величин, выбранных оператором;
•о сбросе цели с автосопровождения. Критерием сброса цели с автосопровождения является не обнаружение эхосигнала от цели в течение нескольких (например, семи) последовательных оборотов антенны;
•о появлении новой цели при авто захвате;
•о выходе своего судна за пределы обозначенного на экране индикатора фарватера;
•о неисправностях работы РЛС.
| <== предыдущая лекция | | | следующая лекция ==> |
| Типы судов для перевозки навалочных грузов и порядок их загрузки | | | ОБЩИЕ СВЕДЕНИЯ О ПОВЕРХНОСТИ ДЕТАЛЕЙ И ЕЕ ГЕОМЕТРИИ |
Дата добавления: 2021-04-21; просмотров: 260;
Поиск по сайту
Узнать еще
- I. Общая характеристика категории состояния как часть речи
- II. Лексико-грамматические разряды местоимений. Их общая характеристика
- IV. ОБЩАЯ ХАРАКТЕРИСТИКА ВИРУСОВ
- V. Схема разбора глагола
- XXIII. ОБЩАЯ ХАРАКТЕРИСТИКА
- А — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу)
- А) Назначение и устройство
- А) технологическая схема работы бетоносмесительной установки; б) блок дозирования каменных материалов; в) смесительный блок

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
