Типовые структуры перспективных систем управления приводами переменного тока
На рис. 9.10 показана структура привода переменного тока с векторным управлением. В качестве исполнительного двигателя может применяться либо синхронный двигатель с активным магнитоэлектрическим ротором, либо синхронный реактивный двигатель.
Возможно использование этой структуры и для управления трехфазными вентильно-индукторными двигателями с разнополярным питанием, а также шаговыми двигателями в режиме бесколлекторных двигателей постоянного тока.
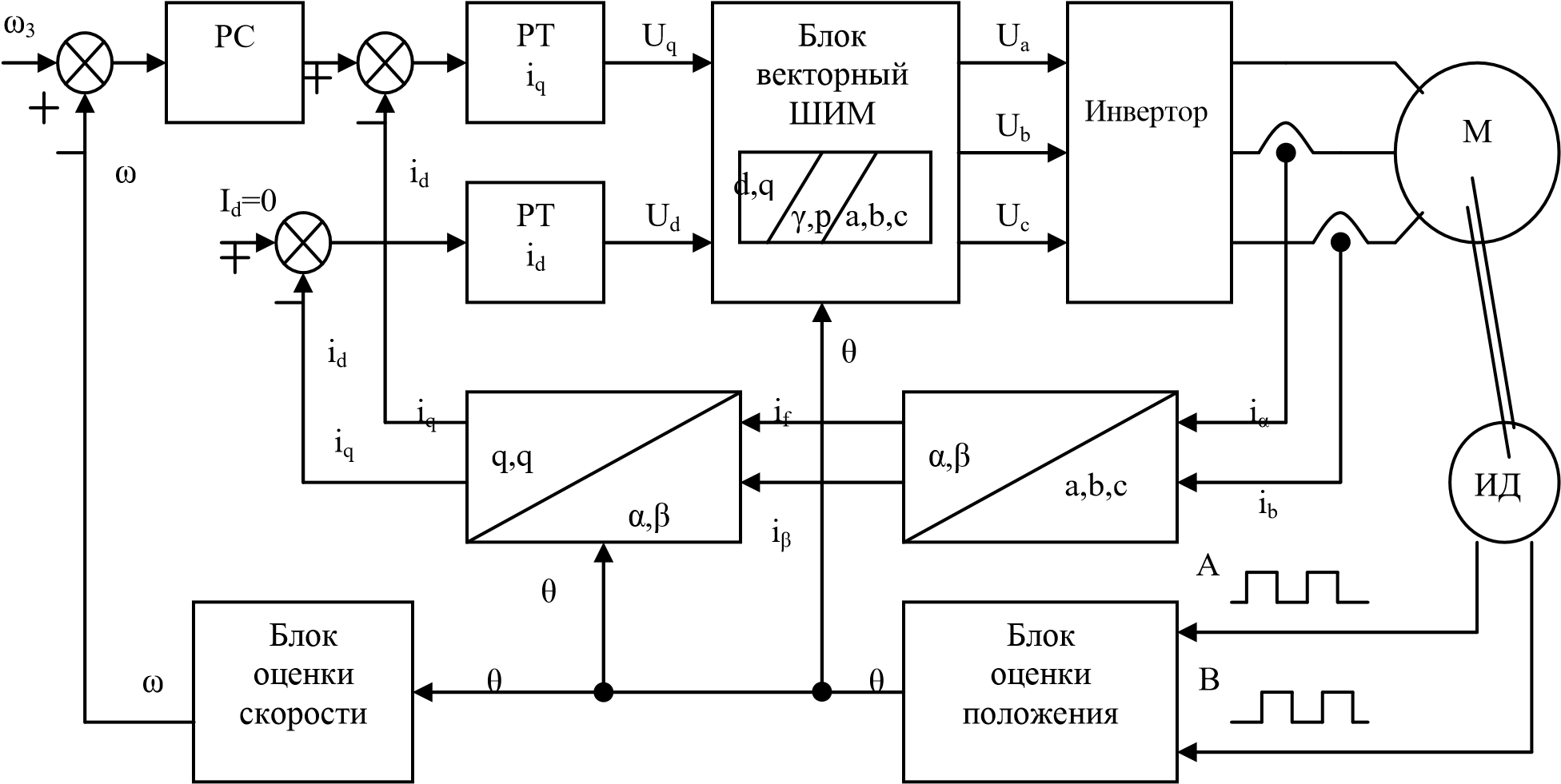
Рис. 9.10. Структурная схема привода переменного тока с векторным управлением
В качестве силового преобразователя используется инвертор на IGBT- ключах или интеллектуальных силовых модулях. Драйверы ключей инвертора подключены непосредственно к выходам ШИМ-генераторамикроконтроллера (А, А/, В, В/, С, С/), работающего в режиме широтноимпульсной модуляции базовых векторов(векторной ШИМ-модуляции), что обеспечивает максимально высокую степень использования напряжения звена постоянного тока и минимизацию динамических потерь в инверторе.
Структура (см. рис. 9.10) предполагает использование импульсного датчика положения ротора двигателя. Сигналы с датчика вводятся непосредственно в контроллер и обрабатываются в блоке оценки положения, который может быть реализован на основе специального периферийного устройства таймера с «квадратурным» режимомработы. Код механического положения ротора программно преобразуется в код электрического положения ротора внутри полюсного деления машины q. Для реализации блока оценки скорости могут применяться специальные периферийные устройства микроконтроллера, принцип действия которых основан на измерении временного интервала отработки двигателем заданного отрезка пути.
Для измерения электрических переменных микроконтроллер должен иметь встроенный АЦПс разрешением не ниже 10-12 двоичных разрядов и временем преобразования не хуже 5-10 мкс. Как правило, восьми каналов АЦП достаточно для приема не только сигналов обратных связей по токам фаз, но и сигналов обратных связей по напряжению и току в звене постоянного тока, а также внешних задающих сигналов. Дополнительные аналоговые сигналы используются для реализации защит инвертора и двигателя. Работа АЦП будет более производительной, если микроконтроллер допускает режим автоматического сканирования и запуска процесса преобразования. Итак, на основе полученной информации о токах фаз ia и ib восстанавливается значение тока в фазе С (ic) и выполняется преобразование токов к неподвижной системе координат, связанной со статором (а, b, с(r), а, b). Переход от неподвижной системы координат к подвижной, связанной с текущим положением ротора (a, b(r), d, q), позволяет рассчитать компоненты результирующего вектора тока статора по осям d и q соответственно.
Известно, что момент синхронного двигателя с возбуждением от постоянных магнитов прямо пропорционален составляющей вектора тока статора по поперечной оси q. При этом для минимизации общего потребляемого двигателем тока желательно поддерживать ток по продольной оси d равным нулю. Таким образом, выход регулятора скорости привода (PC) следует подключить на вход регулятора тока(РТ) по перечной оси (РТ iq) а на вход регулятора тока по продольной оси (РТ id), подать нулевое задание. Обычно регуляторы скорости и токов являются пропорционально-интегральными.
Выходные сигналы регуляторов тока пропорциональны компонентам результирующего вектора напряжения статора по осям d и q соответственно. В блоке векторной ШИМ-модуляции выполняется сначала преобразование компонент вектора напряжения к полярной системе координат (g, r), связанной с продольной осью ротора, а затем, с учетом текущего положения ротора q, определяется рабочий сектор, внутрисекторный угол и рассчитываются компоненты базовых векторов в абсолютной системе координат, связанной со статором. Формируются напряжения, прикладываемые к обмоткам двигателя Ua, Ub, Uc.
Отличительной особенностью системы векторного управления асинхронными двигателями является необходимость использования дополнительного вычислительного блока, в котором производится оценка текущего углового положения вектора потокосцепления ротора. Это делается на основе решения в реальном времени системы дифференциальных уравнений, составленных в соответствии с математической моделью двигателя. Естественно, что подобная операция требует дополнительных вычислительных ресурсов центрального процессора. Рассмотренная выше структура системы управления обеспечивает автоматическое формирование в фазах двигателя синусоидальных токов и напряжений при работе исполнительного двигателя в режиме бесколлекторного двигателя постоянного тока с оптимальным углом коммутации и минимизацией пульсаций электромагнитного момента. В ряде применений, например, для приводов с вентильно-индукторными и бесколлекторными двигателями постоянного тока, вполне достаточно на интервале коммутации поддерживать в обмотке двигателя заданный фиксированный уровень тока. Структура системы управления при этом заметно упрощается (рис. 9.11). Особенность схемы состоит в том, что ШИМ-генератор обеспечивает сразу две функции: автокоммутацию фаз двигателя по сигналам датчика положения и поддержание тока на заданном уровне путем регулирования приложенного к обмоткам двигателя напряжения. Первая функция может быть реализована автоматически, если генератор имеет встроенный блок управления выходами,допускающий прием команд от процессора событий. Вторая функция традиционна и реализуется путем изменения скважности выходных ШИМ-сигналов.
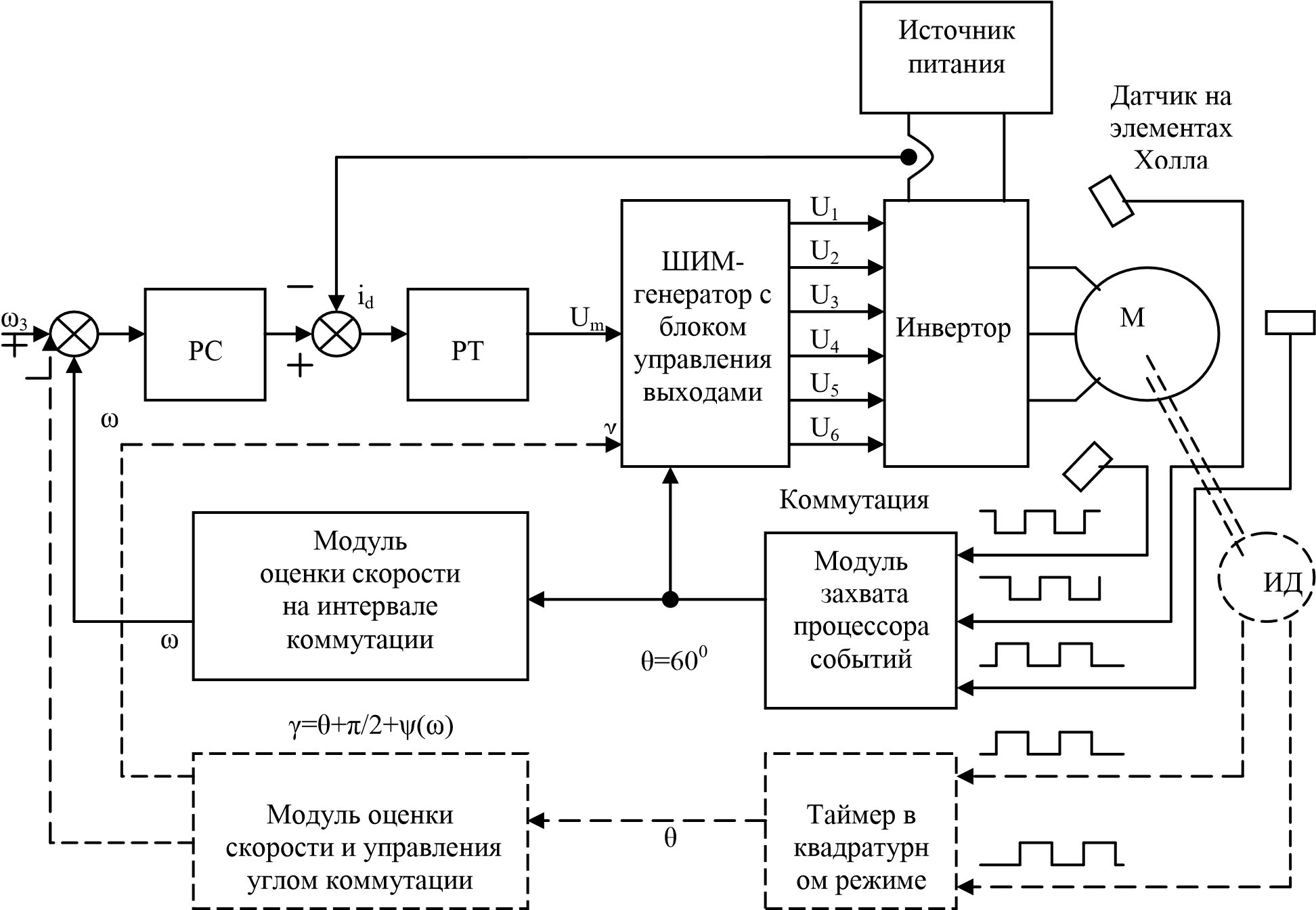
Рис. 9. 11 Блок-схема системы управления бесколлекторным двигателем постоянного тока
Для оценки положения ротора двигателя можно использовать либо датчик положения на элементах Холла, либо более дорогой импульсный датчик положения. В первом случае сигналы с датчика положения вводятся в микроконтроллер на входы модулей захвата процессорасобытий. Отработка двигателем каждого целого шага идентифицируется процессором событий и вызывает автокоммутацию ключей инвертора. Прерывание, возникающее при каждом захвате фронта сигнала с датчика, используется для оценки времени между двумя соседними переключениями и, далее, скорости привода.
Во втором случае можно получить более точную информацию о текущем положении ротора двигателя и о его скорости, что может потребоваться в приводах с интеллектуальным управлением углом коммутации в функции скорости. Таким образом, полноценные системы векторного управления приводами переменного тока требуют для своей реализации высокопроизводительных микроконтроллеров с широким набором перечисленных выше встроенных периферийных устройств, допускающих совместную работу и требующих от центрального процессора минимальных ресурсов на свое обслуживание.
Дата добавления: 2021-04-21; просмотров: 306;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- B. Департаменты и управления функционального характера.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- google_protectAndRun("ads_core.google_render_ad", google_handleError, google_render_ad); Великие географические открытия Запада и Востока ч.1

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
