Принцип действия основных типов электромеханических измерительных приборов
1 Магнитоэлектрическая система

урганский государственный
Рис.5.Механизм магнитоэлектрического прибора
1 – ось; 2 – пружины; 3 – рамка; 4 – полюсные наконечники; 5 – указатель; 6 – сердечник.
Приборы этой системы предназначены для измерения силы тока и напряжения в цепях постоянного тока. Схема отклоняющего механизма магнитоэлектрического прибора показана на рис.5.
Прямоугольная рамка с витками изолированного провода (3), по которым проходит измеряемый ток, находится в кольцевом зазоре. За счет постоянного магнита с полюсными наконечниками (4) и цилиндрического сердечника (6) в зазоре создается радиальное магнитное поле. Рамка удерживается в зазоре и может вращаться за счет осей (1). При отсутствии тока, рамка с прикрепленными к ней указателем (5) удерживается на нулевом делении шкалы двумя пружинами (2). В чувствительных приборах вместо осей и спиральных пружинок используются две ленточные растяжки. Измеряемый ток подводится к виткам через пружинки или растяжки. При протекании через витки измеряемого тока появляется вращающий рамку момент сил. Угол поворота α определяется равенством момента спиральных пружин и момента сил, обусловленного протеканием тока в рамке, и пропорционален измеряемому току, в котором и градуируется шкала прибора.
 ;(9)
;(9)
где n – количество витков;
В – индукция магнитного поля;
S – площадь витка;
w – удельный противодействующий момент.
При включении постоянного тока рамка приходит к равновесию в режиме затухающего колебательного процесса. Таким образом, можно выделить три режима движения подвижной части:
Периодический - подвижная часть совершает колебания около отметки действительного значения измеряемой величины.
Апериодический - подвижная часть достигает установившегося значения без колебаний.
Критический - подвижная часть достигает установившегося значения без колебаний за минимальное время.
Для сокращения времени установления равновесных показаний прибор конструируют так, чтобы частота колебаний подвижной системы и время прихода к равновесию было минимальным. Для этой цели используются специальные демпфирующие устройства – воздушные и индукционные.
При любой величине протекающего переменного тока показания прибора отсутствуют, если период колебаний тока мал, то стрелка прибора будет колебаться с частотой, равной частоте тока. Некоторые приборы магнитоэлектрической систем, имеющие на шкале рисунок диода, снабжены выпрямительным устройством и могут использоваться для измерений в цепях переменного тока.
Обычно сопротивление обмотки рамки составляет 100…1000 Ом, ток полного отклонения – 100 мкА…1А и при непосредственном включении рамки в цепь прибор можно использовать в качестве микроамперметра, миллиамперметра или милливольтметра. О расширении пределов измерения по току и напряжению будет рассказано ниже.
К достоинствам магнитоэлектрических приборов следует отнести: высокую чувствительность – до 3 · 10-11 А, высокую точность – до 0,1%, малое потребление мощности – 10-5…10-6 Вт. Вследствие того, что магнитоэлектрические приборы обладают высокой чувствительностью и малым собственным потреблением, они широко используются в сочетании с преобразователями для создания приборов переменного тока (например, выпрямительных, электронных и термоэлектрических).
Недостатки: сложность изготовления и ремонта, недопустимость перегрузок по току (перегорают или меняют свои физико-механические свойства токоподводящие пружинки, растяжки, обмотка рамки).
2 Электромагнитная система
Приборы электромагнитной системы предназначены для измерения силы тока и напряжения в цепях переменного и постоянного тока. Принцип действия приборов основан на взаимодействии магнитного поля неподвижной катушки (1), по которой протекает измеряемый ток, с подвижным ферромагнитным сердечником (2) специальной формы, соединенным со стрелкой. (Рис.6.) Сердечник закреплен эксцентрично на оси и может входить в щель катушки, поворачиваясь вокруг оси (3). Демпфер (4) препятствует колебаниям стрелки.
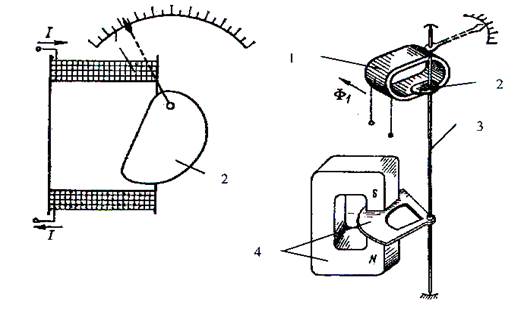
Рис.6. Механизм электромагнитного прибора
1 - катушка; 2 - сердечник; 3 - ось; 4 - электромагнитный успокоитель.
Магнитное поле катушки пропорционально току. Намагниченность железного сердечника пропорциональна магнитной индукции и возрастает с увеличением тока. В результате можно приближенно считать, что в электромагнитном приборе вращающий момент пропорционален квадрату тока. Противодействующий момент, создаваемый пружиной, пропорционален углу поворота подвижной части прибора. Равновесие достигается при равенстве вращающего и противодействующего моментов. При этом угол поворота α равен
 ; (10)
; (10)
где w - удельный противодействующий момент;
I - измеряемый ток;
L - индуктивность.
Из уравнения видно, что шкала неравномерна и носит квадратичный характер. Для уменьшения неравномерности шкалы прибора необходимо, чтобы чувствительность была также неравномерна в зависимости от угла поворота. Это достигается выбором формы лепестка.
При протекании через катушку прибора электромагнитной системы переменного синусоидального тока отклонение стрелки будет определяться средним квадратом тока.
 ; (11)
; (11)
Шкала прибора градуируется в действующих значениях синусоидального тока.
Таким образом, показания приборов электромагнитной системы определяются квадратом тока и на зависят от его направления (т.к. при любом направлении тока через катушку сердечник будет втягиваться в нее). Это позволяет использовать приборы электромагнитной системы в цепях постоянного и переменного тока. За счет специальной формы сердечника удается большую часть шкалы сделать близкой к равномерной, но нелинейный участок в начале шкалы – неизбежность.
Достоинства электромагнитных механизмов.
Пригодность для работы в цепях постоянного переменного тока; большая перегрузочная способность; возможность непосредственного измерения больших токов и напряжений; простота конструкции и надежность.
Недостатки электромагнитных механизмов.
Неравномерная шкала; невысокая чувствительность; большое собственное потребление мощности; зависимость показаний от частоты (полное сопротивление катушки определяется ее активным сопротивлением R и индуктивностью L и зависит от частоты, поэтому величина тока через обмотку уменьшается с увеличением частоты при неизменном напряжении); подверженность влиянию внешних магнитных полей и температуры. Промышленностью выпускаются приборы на токи 0…100А, на напряжения 0…600 В, с классами точности 1 и ниже и частотным диапазоном до 1000 Гц (указывается на шкале прибора).
3. Электростатическая система
Устройство приборов электростатической системы основано на взаимодействии двух заряженных проводников, которыми обычно являются два плоских электрода (1,2), один из которых подвижен. Стрелка закреплена на оси (3) и удерживается на нуле пружиной (4). При подаче на электроды напряжения между пластинами возникает сила электростатического взаимодействия. Вращающий момент силы притяжения пластин уравновешивается моментом силы упругости пружины. Таким образом, угол отклонения подвижной части α:
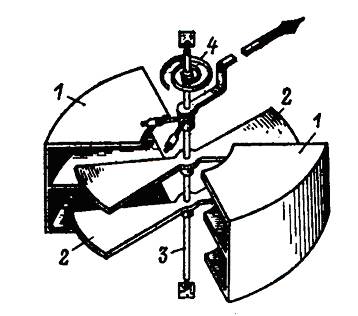
Рис.7. Электростатический механизм
Уравнение шкалы прибора имеет вид:  ; (12)
; (12)
где w - удельный противодействующий момент;
U - измеряемое напряжение;
C - емкость.
Аналогично прибору электромагнитной системы при подаче переменного напряжения угол отклонения оказывается пропорционален действующему значению напряжения. Показания электростатических вольтметров практически не зависят от частоты и формы кривой измеряемого напряжения; кроме того, эти приборы обладают очень большим входным сопротивлением. Для расширения пределов измерения электростатических вольтметров применяют емкостные делители.
Достоинства электростатических приборов.
Приборы электростатического типа имеют высокое входное сопротивление, малую, но переменную входную емкость, малую мощность самопотребления, широкий частотный диапазон. Данные приборы могут использоваться в цепях переменного и постоянного тока. Показания приборов соответствуют среднеквадратическому значению измеряемой величины, и показания не зависят от формы кривой измеряемого сигнала.
Недостатки электростатических приборов.
Приборы имеют квадратичную шкалу, малую чувствительность из-за слабого электростатического поля и невысокую точность. Кроме того, приборы требуют применения экрана и не исключают возможность электрического пробоя.
4. Электродинамическая система
Электродинамический ИМ состоит из системы неподвижных и подвижных катушек (рамок), стойки, упругих элементов, успокоителя, отсчетного устройства, средств магнитной защиты. Катушки выполняют круглыми или прямоугольными. Круглые катушки дают, по сравнению с прямоугольными, увеличение чувствительности на 15—20%. Приборы с прямоугольными катушками имеют меньшие размеры прибора по вертикали.
Неподвижные катушки обычно выполняют из двух половин (секций) 1 (рис.8). При этом, изменяя расстояние между катушками, можно менять конфигурацию магнитного поля. Подвижные катушки 2 размещают внутри неподвижных. На оси подвижной катушки закрепляется стрелка 3. Вращающий момент создается при взаимодействии магнитного поля, создаваемого током I1, проходящим по катушке 1, и магнитным полем, создаваемым током I2, проходящим через катушку 2. Электромагнитная энергия We двух контуров с токами
 , (13)
, (13)
где L1, L2- индуктивность неподвижной и подвижной катушек; M1,2 - взаимная индуктивность катушек.
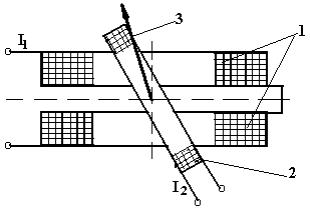
Рис. 8.
Так как индуктивность катушек не зависит от угла поворота, поэтому вращающий момент, действующий на подвижную катушку 2
 . (14)
. (14)
При механическом создании противодействующего момента угол отклонения подвижной может быть определен по формуле
 . (15)
. (15)
При протекании по катушкам переменных токов сдвинутых по фазе на угол  :
:  и
и  . (16)
. (16)
Мгновенное значение вращающего момента
 . (17)
. (17)
Так как подвижная часть ИМ реагирует на среднее значение МВР равное
 , (18)
, (18)
где I1 и I2 - действующие значения токов; y - угол сдвига фаз между векторами токов I1 и I2.
Угол отклонения подвижной части равен
 . (19)
. (19)
 В электродинамических логометрических измерительных механизмах противодействующий момент создается электрическим способом. Подвижная часть такого механизма состоит из двух 2 и 3 (рис. 20) жестко закрепленных между собой под определенным углом g катушек.
В электродинамических логометрических измерительных механизмах противодействующий момент создается электрическим способом. Подвижная часть такого механизма состоит из двух 2 и 3 (рис. 20) жестко закрепленных между собой под определенным углом g катушек.
Рис. 9.
В данных механизмах создается два момента М1 и М2.
 ;
;  , (21)
, (21)
где I – ток в катушке 1; I1 и I2 - токи в катушках 2 и 3.
При М1 = М2 получим выражение
 , (22)
, (22)
из которого следует, что угол отклонения подвижной части зависит от отношения токов I1/I2.
Достоинства электродинамических приборов.
Приборы электродинамического типа имеют высокую точность. Данные приборы могут использоваться в цепях переменного и постоянного тока.
Недостатки электростатических приборов.
Приборы имеют квадратичную шкалу, малую чувствительность, ограниченный частотный диапазон и большую мощность потребления. Кроме того, приборы требуют применения экрана от внешних магнитных полей.
Дата добавления: 2021-04-21; просмотров: 282;
Поиск по сайту
Узнать еще
- I. Понятие о принципах обучения, их взаимосвязь.
- I. Темы рефератов, соответствующие актуальным проблемам в содержании основных разделов программы курса
- I. Темы рефератов, соответствующие актуальным проблемам в содержании основных разделов программы курса «Философия и методология науки»
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Механизм действия ионизирующих излучений на биологические структуры
- III. Механизмы, средства и методы психологического воздействия.
- III. Общий принцип сочетания методов в процессе обучения.
- III. Характеристики основных классов загрязняющих веществ в водной среде.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
