Частотные преобразователи индукционного типа
Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
При частоте 50 Гц совершается пятьдесят периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается идеализированный ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.
По конструкции частотные преобразователи бывают:
1. Индукционного типа;
2. Электронные.
Асинхронные электродвигатели с фазным ротором, запущенные в режим генератора, являются представителями первого вида (фазные роторы в АД большой мощности и специальных машинах малой мощности применяются для улучшения пусковых и регулировочных свойств). Трехфазная обмотка ротора (рис. 3.1, 3.2) с соединенными звездой фазными катушками, сдвинутыми в пространстве друг относительно друга на 120°, своими концами присоединяется к трем контактным кольцам, насаженным на вал, электрически изолированным как от вала, так и друг от друга. С помощью щеток, находящихся в скользящем контакте с кольцами, включают в цепи фазных обмоток регулировочные реостаты.

Рис. 3.1.

Рис. 3.2. Схема включения асинхронного двигателя с пускорегулировочным реостатом
При подключении к сети трехфазной обмотки статора создается вращающееся магнитное поле, угловая скорость которого определяется частотой сети f и числом пар полюсов обмотки p, т. е. ω1=2πf/p.
Пересекая проводники обмотки статора и ротора, это поле индуктирует в обмотках ЭДС (согласно закону электромагнитной индукции). При замкнутой обмотке ротора ее ЭДС наводит в ней ток. В результате взаимодействия тока ротора с результирующим магнитным полем создается электромагнитный момент. Если этот момент превышает момент сопротивления на валу двигателя, вал начинает вращаться и приводить в движение рабочий механизм. Обычно угловая скорость ротора ω2 не равна угловой скорости магнитного поля ω1, называемой синхронной. Работа асинхронной машины характеризуется скольжением s, которое представляет собой относительную разность угловых скоростей поля ω1 и ротора ω2: s=(ω1-ω2)/ω1.
Значение и знак скольжения, зависящие от угловой скорости ротора относительно магнитного поля, определяют режим работы асинхронной машины. Так, в режиме идеального холостого хода ротор и магнитное поле вращаются с одинаковой частотой в одном направлении, скольжение s=0, ротор неподвижен относительно вращающегося магнитного поля, ЭДС в его обмотке не индуктируется, ток ротора и электромагнитный момент машины равны нулю.
При пуске ротор в первый момент времени неподвижен: ω2=0, s=1. В общем случае скольжение в двигательном режиме изменяется от s=1 при пуске до s=0 в режиме идеального холостого хода.
При вращении ротора со скоростью ω2>ω1 в направлении вращения магнитного поля скольжение становится отрицательным. Машина переходит в генераторный режим и развивает тормозной момент. При вращении ротора в направлении, противоположном направлению вращения магнитного поля (s>1), асинхронная машина переходит в режим противовключения и также развивает тормозной момент. Таким образом (см. рис. 3.3), в зависимости от скольжения различают двигательный (s=1÷0), генераторный (s=0÷-∞) режимы и режим противовключения (s=1÷+∞). Режимы генераторный и противовключения используют для торможения асинхронных двигателей.
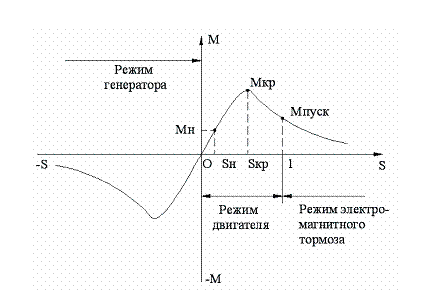
Рис. 3.3.
Пуск асинхронного двигателя сопровождается переходным процессом машины, связанным с переходом ротора из состояния покоя в состояние равномерного вращения, при котором момент двигателя уравновешивает момент сил сопротивления на валу машины.
При пуске АД повышается потребление электрической энергии из питающей сети, затрачиваемое не только на преодоление приложенного к валу тормозного момента и покрытие потерь в самом двигателе, но и на сообщение движущимся звеньям приводного механизма определенной кинетической энергии. Поэтому при пуске АД должен развить повышенный вращающий момент.
Для асинхронного двигателя с фазным ротором начальный пусковой момент, соответствующий скольжению sп=1, зависит от активных сопротивлений регулируемых резисторов, введенных в цепь ротора (рис. 3.4).
При замкнутых контактах ускорения У2, т. е. при пуске АД с замкнутыми накоротко контактными кольцами, начальный пусковой момент МП1 = (0,5 -1,0) Мном, а начальный пусковой ток IП = (4,5 - 7) Iном и более.
Малый начальный пусковой момент АД может оказаться недостаточным для приведения в действие приводного механизма и последующего его ускорения, а значительный пусковой ток вызовет повышенный нагрев обмоток двигателя, что ограничивает частоту его включений, а в маломощных сетях приводит к нежелательному для работы других приемников временному понижению напряжения.
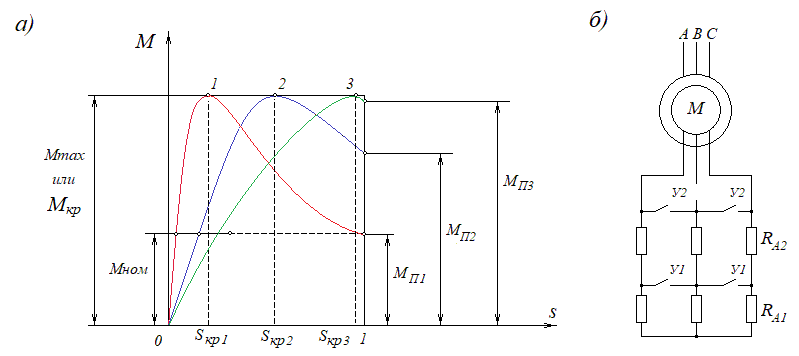
Рис. 3.4. Пуск с фазным ротором: а — графики зависимости вращающего момента двигателя с фазным ротором от скольжения при различных активных сопротивлениях резисторов в цепи ротора, б — схема включения резисторов и замыкающих контактов ускорения в цепь ротора
Эти обстоятельства могут явиться причиной, исключающей использование асинхронных двигателей с фазным ротором с большим пусковым током для привода рабочих механизмов.
Введение в цепь ротора регулируемых резисторов, называемых пусковыми, не только снижает начальный пусковой ток, но одновременно увеличивает начальный пусковой момент, который может достигнуть максимального момента Mmax , если критическое скольжение двигателя с фазным ротором
sкр = (R2' + Rд') / (Х1 + Х2') = 1,
где Х1 – реактивное сопротивление статора; Х2', R2' – соответственно реактивное и активное сопротивления ротора, приведенные к фазе обмотки статора; Rд' — активное сопротивление резистора, находящегося в фазе обмотки ротора двигателя, приведенное к фазе обмотки статора (на рис. 3.4, а, кривая 3 практически соответствует данному условию). Дальнейшее увеличение активного сопротивления пускового резистора нецелесообразно, так как оно приводит к ослаблению начального пускового момента и выходу точки максимального момента в область скольжения s > 1, что исключает возможность разгона ротора.
Определение критического скольжения
Если постепенно повышать нагрузку двигателя, то скольжение будет расти (ротор будет все сильнее отставать от вращающегося магнитного поля), при этом пропорционально скольжению будет расти ток, наводимый в роторе, а пропорционально ему будет расти и момент. Но при росте скольжения также возрастают и активные потери в роторе, которые снижают ток ротора, поэтому момент растет медленнее чем скольжение, и при определенном скольжении момент достигает максимума, а потом начинает снижаться. Скольжение, при котором момент достигает максимума, называется критическим. При малых же нагрузках можно считать, что момент пропорционален скольжению.
Определение критического момента
Критический момент асинхронного двигателя – наибольшее значение момента развиваемое электродвигателем. Этого значения момент достигает при критическом скольжении. Если момент нагрузки на валу двигателя будет больше критического момента, то двигатель остановится.
Необходимое активное сопротивление резисторов для пуска двигателя с фазным ротором определяют, исходя из требований пуска, который может быть легким, когда МП = (0,1 - 0,4) Mном, нормальным, если МП = (0,5 - 0,75) Мном, и тяжелым при МП ≥ Мном.
Для поддержания достаточно большого вращающего момента двигателем с фазным ротором в процессе разгона производственного агрегата с целью сокращения длительности переходного процесса и снижения нагрева двигателя необходимо постепенно уменьшать активное сопротивление пусковых резисторов.
Возможность использования асинхронной машины с фазным ротором в качестве преобразователя частоты вытекает из равенства  . Изменением скольжения
. Изменением скольжения  частоту
частоту  можно или уменьшить (
можно или уменьшить (  ), или увеличить (
), или увеличить (  ) по сравнению с частотой
) по сравнению с частотой  . Практическое применение асинхронные преобразователи частоты нашли главным образом для повышения частоты переменного тока с 50 до 100 и 150 Гц. Они используются для питания быстроходных асинхронных двигателей с частотой вращения n > 3000 об/мин. Асинхронный преобразователь частоты (рис. 3.5) состоит из трехфазной асинхронной машины П с контактными кольцами и соединенного с ней приводного двигателя Д. Обмотка статора асинхронной машины П включается в первичную сеть промышленной частоты , а обмотка ротора через контактные кольца и щетки питает вторичную сеть током частоты
. Практическое применение асинхронные преобразователи частоты нашли главным образом для повышения частоты переменного тока с 50 до 100 и 150 Гц. Они используются для питания быстроходных асинхронных двигателей с частотой вращения n > 3000 об/мин. Асинхронный преобразователь частоты (рис. 3.5) состоит из трехфазной асинхронной машины П с контактными кольцами и соединенного с ней приводного двигателя Д. Обмотка статора асинхронной машины П включается в первичную сеть промышленной частоты , а обмотка ротора через контактные кольца и щетки питает вторичную сеть током частоты  .
.
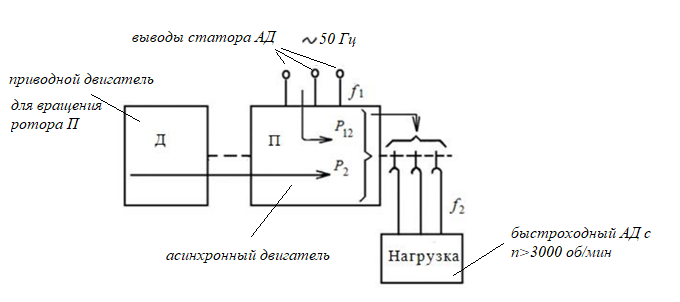
Рис. 3.5.
Мощность, отдаваемая обмоткой ротора во внешнюю сеть, частично поступает от статора электромагнитным путем, а частично преобразуется из механической мощности P2 , получаемой от двигателя Д (рис. 3.6).
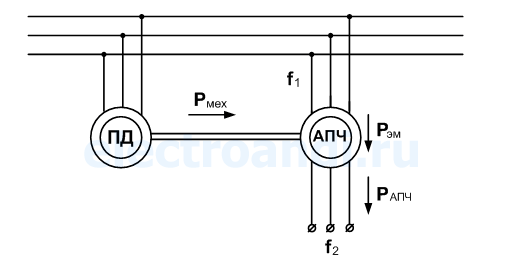
Рис. 3.6. ПД – приводной двигатель; АПЧ – асинхронный преобразователь частоты
Полная активная электрическая мощность цепи ротора  , где
, где  – сумма сопротивлений ротора и нагрузки.
– сумма сопротивлений ротора и нагрузки.
Мощность, переносимая электромагнитным путем в ротор,  , а подведенная со стороны двигателя
, а подведенная со стороны двигателя  .
.
Отношение между этими мощностями  .
.
При  , когда
, когда  ,
, 
Таким образом,если асинхронная машина подключена к сети, то для того чтобы она начала работать генератором, необходимо с помощью постороннего двигателя развернуть ее ротор в сторону вращения магнитного поля с угловой скоростью w, большей синхронной скорости поля статора w1. Скольжение при этом будет отрицательным. Направления перемещения магнитного поля относительно проводников статора и ротора в этом случае противоположны, поэтому ЭДС, индуцируемые в них, будут иметь разные знаки.
По сравнению с двигательным режимом, направления ЭДС  и активной составляющей тока ротора меняются на обратные. В результате этого изменяется направление момента, т. е. он становится тормозным и направленным против движения ротора.
и активной составляющей тока ротора меняются на обратные. В результате этого изменяется направление момента, т. е. он становится тормозным и направленным против движения ротора.
Реактивная составляющая тока ротора 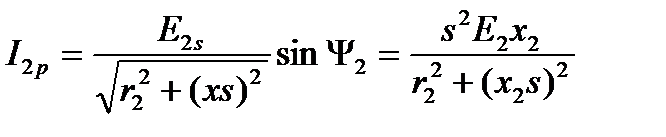 в генераторном режиме (при s < 0) имеет тот же знак, что и в двигательном.
в генераторном режиме (при s < 0) имеет тот же знак, что и в двигательном.
Итог: Если ротор преобразователя вращать против направления вращения магнитного поля статора (то есть в режиме противовключения), то скольжение s>1, исходя из этого, частота получаемого тока будет больше частоты статора f2>f1. Если изменить направление вращения приводного двигателя, то скольжение s<1 (работа в двигательном режиме), а частота получаемого тока f2<f1.
Частоту f2 можно рассчитать по формуле
Следует понимать, что при вращении ротора АПЧ со скоростью вращения больше синхронной, s>1, а значит, в числителе вышеприведенной формулы должен стоять знак плюс. В случае, когда скольжение s<1 – знак минус.
Знак плюс относится к случаю, когда ротор вращается против поля статора, а знак минус — согласно с полем статора. Следовательно, при вращении ротора против поля частота f2 > f1 согласно с полем f2 < f1. При неподвижном состоянии ротора АПЧ частота f2 = f1.
С возрастанием выходной частоты АПЧ установленная мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ применяются обычно для получения частот, превышающих частоту питающей сети, когда необходимо регулировать угловую скорость большого числа согласованно работающих асинхронных двигателей с короткозамкнутым ротором.
Недостатком асинхронного генератора, так же как и асинхронного двигателя, является потребление из сети реактивной мощности, необходимой для создания магнитного поля. Мощность эта велика и составляет 20-50% полной мощности генератора. Поэтому асинхронные генераторы как источники переменного тока применяются сравнительно редко. В электроприводе генераторный режим асинхронной машины используется для рекуперативного торможения. Примером этому может быть спуск груза подъемным краном, когда двигатель включается согласно с направлением спуска. Тогда под действием силы тяжести груза ротор разгоняется, и его скорость становится больше синхронной, т. е. машина переходит в генераторный режим. Тормозной момент, который возникает в этом случае, ограничивает скорость спуска груза, а кинетическая энергия груза будет преобразовываться в электрическую и возвращаться в сеть.
Дата добавления: 2021-02-19; просмотров: 221;
Поиск по сайту
Узнать еще
- Cпециализированные преобразователи
- D - триггер типа «защелка»
- DC-AC преобразователи. Двухактный инвертор.
- А). Классификация предпринимательских структур по типам на втором этапе становления постсоветского предпринимательства.
- А). Классификация предпринимательских структур по типам на первом этапе становления постсоветского предпринимательства
- Абсолютные и дифференциальные вихретоковые преобразователи
- Автогенераторы LC-типа
- Автоколебательные системы томпсоновского типа

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
