Комбинированные АСР
Комбинированные системы регулирования применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
На рис. 3.28. приведен фрагмент функциональной схемы автоматизации выпарной установки, в которой одним из наиболее сильных возмущений является расход питания. Основная задача регулирования – стабилизация концентрации упаренного раствора за счет изменения расхода греющего пара – выполняется регулятором 1.
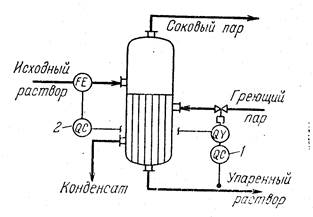
Рис.3.28.Пример комбинированной системы регулирования
концентрации упаренного раствора:
Регулятор состава; 2 – динамический компенсатор.
Кроме сигнала регулятора, на клапан, регулирующий подачу пара, через динамический компенсатор 2 поступает корректирующий импульс по расходу питания.
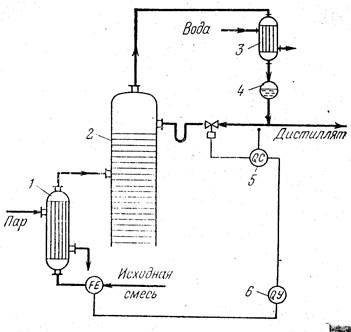
Рис.3.29.Пример комбинированной системы регулирования
состава дистиллятара:
1-подогреватель исходной смеси; 2-ректификационная колонна; 3-дифлегматор; 4-флегмовая емкость; 5-регулятор; 6-динамический компенсатор.
На рис.3.29 приведен пример комбинированной АСР состава дистиллятара в ректификационной колонне. Стабилизация состава дистиллята обеспечивается регулятором 5 путем изменения подачи флегмы на орошение колонны. Для повышения качества регулирования в системе предусмотрена автоматическая коррекция задания регулятору 5 в зависимости от одного из основных возмущений в процессе-расхода разделяемой смеси. Корректирующий импульс на задание регулятору поступает через динамический компенсатор 6.
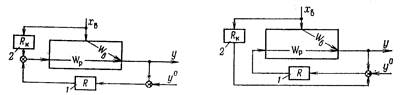
Рассмотренные примеры иллюстрируют два способа построения комбинированных АСР. Как видно из структурных схем (рис.3.30,а и 3.30,б),обе системы регулирования обладают общими особенностями: наличие двух каналов воздействия на выходную координату объекта и использованием двух контуров регулирования – замкнутого (через регулятор 1 ) и разомкнутого (через компенсатор 2 ). Отличие состоит лишь в том, что во втором случае корректирующий импульс от компенсатора поступает не на вход объекта, а на вход регулятора.
Введение корректирующего импульса по наиболее сильному возмущению позволяет существенно снизить динамическую ошибкурегулирования при условии правильного выбора и расчета динамического устройства, формирующего закон изменения этого воздействия.
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть тождественно равным нулю при любых задающих или возмущающих воздействиях.
Для выполнения принципа инвариантности необходимы два условия: идеальная компенсация всех возмущающих воздействий и идеальное воспроизведение сигнала задания. Очевидно, что достижения абсолютной инвариантности в реальных системах регулирования практически невозможно.
А) б)
Рис 3.30. Структурные схемы комбинированных АСР при подключении
выхода компенсатора на вход объекта (а) и на вход регулятора (б):
Дата добавления: 2021-02-19; просмотров: 403;
Поиск по сайту
Узнать еще

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
