Электромеханических систем
В современных системах управления, в частности и в ЭМС, получили широкое распространение регуляторы, выполненные на операционных усилителях. В зависимости от математического закона, по которому ведёт себя выходное напряжение регулятора при подаче на вход прямоугольного импульса, регуляторы могут быть пропорциональные, интегральные и дифференциальные. Наиболее часто в ЭМС применяются следующие виды регуляторов: пропорциональный, пропорционально-интегральный, пропорционально-интегрально-дифференциальный. Рассмотрим схемы и математические модели этих регуляторов.
Математическая модель П-регулятора.Схема П-регулятора, суммирующего и усиливающего два входных напряжения UВХ1 и UВХ2, представлена на рис. 2.35.
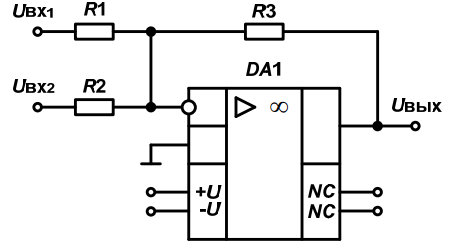
Рис. 2.35. Схема П-регулятора
Представим без вывода уравнение, описывающее динамику П- регулятора. Выходное напряжение определим как

При R1=R2 получим

где kРЕГ= R3/R1 – коэффициент передачи П-регулятора.
Применив к этому уравнению прямое преобразование Лапласа с нулевыми начальными условиями, получим

При включении регулятора в ЭМС первое входное напряжение соответствует напряжению задания UВХ1(р) = UЗАД(р), а второе входное напряжение соответствует напряжению отрицательной обратной связи UВХ1(р)=
=-UОС(р) (рис.2.36). Выходное напряжение регулятора является входным напряжением управления UВЫХ(р) = UУ(р) для широтно-импульсного модулятора (ШИМ), управляющего ШИП.
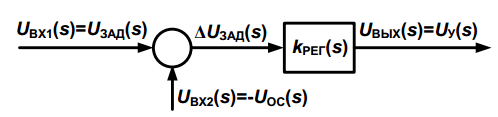
Рис. 2.36. П-регулятор как элемент ЭМС
При одинаковых сопротивлениях (R1=R2=R3) выходное напряжение регулятора равно сумме входных напряжений.
Математическая модель ПИ-регулятора.Схема ПИ-регулятора, суммирующего и усиливающего два входных напряжения UВХ1 и UВХ2, представлена на рис. 2.37.

В случае равенства R1=R2 получим


Рис. 2.37. Схема ПИ– регулятора
Введём для ПИ-регулятора коэффициент передачи kРЕГ = R3 / R1 и постоянную времени TРЕГ = C1 · R1. В этом случае дифференциальное уравнение, описывающее динамику ПИ-регулятора, будет выглядеть как

Применив прямое преобразование Лапласа с нулевыми начальными условиями, получим алгебраическое уравнение для изображений

на основании, которого можно получить передаточную функцию ПИ- регулятора:

Передаточная функция ПИ-регулятора состоит из пропорциональной kРЕГ и интегральной (TРЕГ · р) -1 частей.
Дата добавления: 2021-01-26; просмотров: 260;
Поиск по сайту
Узнать еще
- ОСНОВНЫЕ ТИПЫ И СВОЙСТВА НАПОЛЬНЫХ И БОРТОВЫХ СИСТЕМ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ
- Altium Designer (Protel) - сквозная система проектирования печатных плат
- B). Система относительных координат.
- CASE-технология создания информационных систем
- DSM — система классификации Американской психиатрической ассоциации
- F45.38 другие органы или системы
- I Этапы развития САSЕ-систем
- I. История возникновения и развития классно-урочной системы.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
