Теле при плоском движении
Значительная доля механизмов, применяемых в технике относится к плоским. Анализ их кинематики основывается на результатах, которые получены при изучении плоскопараллельного движения.
Как известно, плоскопараллельным называется такое движение твердого тела (звена), при котором каждая его точка все время движется в одной и той же плоскости. Положение звена на плоскости (для определенности возьмем плоскость XOY) задается положением какого-либо проведенного на этом звене отрезка АВ. В свою очередь положение отрезка АВ можно определить, зная координаты xA и yB точки А и угол φ, который отрезок АВ образует с осью Оx . Точку А, выбранную для определения положения звена 3, будем в дальнейшем называть полюсом.
При движении звена величины xA, yA и φ будут изменяться. Уравнения движения звена
|
 Любое движение твердого тела c бесчисленным множеством способов можно разложить на два движения: одно переносное, другое относительное. Первые два уравнения определяют поступательное движение, при котором все точки звена дви
Любое движение твердого тела c бесчисленным множеством способов можно разложить на два движения: одно переносное, другое относительное. Первые два уравнения определяют поступательное движение, при котором все точки звена дви  жутся так жже, как полюс А. То есть движение, которое звено совершало бы при φ=const. Его примем за переносное движение.
жутся так жже, как полюс А. То есть движение, которое звено совершало бы при φ=const. Его примем за переносное движение.
Третье уравнение определяет движение, которое звено совершало бы при xA=const и yA =const. Это будет вращение звена вокруг неподвижно- го полюса А.. Его примем за относительное движение.
Таким образом, в общем случае движения звена в плоскости можно рассматривать как состоящее из поступательного движения, при котором все его точки движутся так же, как и полюс А, и вращательного вокруг этого полюса. При изучении движения можно в качестве полюса выбрать любую точку звена.
Характеристики поступательного перемещения  ,
,  от выбора полюса зависят. В то же время вращательная часть движения угловая скорость ω и угловое ускорение ε не зависят от выбора полюса.
от выбора полюса зависят. В то же время вращательная часть движения угловая скорость ω и угловое ускорение ε не зависят от выбора полюса.
Рассмотрим три ситуации, связанные с отысканием кинематических параметров подвижных звеньев механизмов.
Случай 1. Две точки принадлежат одному звену
Пусть имеется звено, на котором расположены точки А и В. Абсолютную скорость точки Впредставим как геометрическую сумму скоростей переносного (скорости полюса  ) и относительного (скорости вращения точек вокруг полюса А-
) и относительного (скорости вращения точек вокруг полюса А-  ) движений.
) движений.

 Решение векторного уравнения представлено на рис. 2.9. Следует иметь в виду, что
Решение векторного уравнения представлено на рис. 2.9. Следует иметь в виду, что  и модуль этого вектора определяется по формуле
и модуль этого вектора определяется по формуле  , где ω - угловая скорость звена. Направление ω можно определить по направлению
, где ω - угловая скорость звена. Направление ω можно определить по направлению  и наоборот. Например, когда известно направление
и наоборот. Например, когда известно направление  , то следует мысленно перенести вектор в точку В и посмотреть, куда стремиться переместиться точка В вокруг точки А.
, то следует мысленно перенести вектор в точку В и посмотреть, куда стремиться переместиться точка В вокруг точки А.
Изображение скоростей в виде пучка векторов, при котором абсолютные скорости точек звеньев выходят из одной точки, а относительные скорости соединяют концы лучей, называют планомскоростей.
Поскольку переносное движение выбрано поступательным, то ускорение точки В можно представить в виде геометрической суммы двух ускорений  .
.
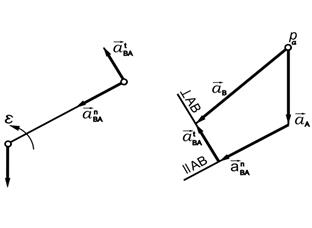 Ускорение
Ускорение  разложим на два: нормальное
разложим на два: нормальное  направленное от точки В к точке А, и тангенциальное, направленное перпендикулярно линии АВ.
направленное от точки В к точке А, и тангенциальное, направленное перпендикулярно линии АВ.
Окончательно получаем следующее векторное уравнение для отыскания ускорения точки В:

 .
.
Величина ускорения  и
и  определим по формулам:
определим по формулам:
 и
и  ,
,
где ε - угловое ускорение звена. Направление ε можно определить по направлению, а τВА и наоборот.
Случай 2. Теоремы подобия для планов скоростей и ускорения
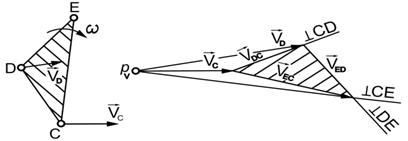
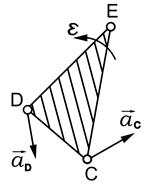
2.1. Дано. 1. Линейные размеры звена CDE.
|
|
 и
и  скорости точек C и D.
скорости точек C и D.
План скоростей
|
|
|
|
Требуется определить .
.

 Скорость
Скорость  связана со скоростями
связана со скоростями  и уравнениями:
и уравнениями:
Строим план скоростей. Треугольник CDE подобен треугольнику cde
 , поскольку
, поскольку  и
и  .
.
Это свойство позволяет сформулировать теорему подобия для плана скоростей: относительные скорости точек жесткого звена образуют на плане скоростей фигуру подобную самому звену и повернутую на 90 ° в направлении его угловой скорости. В подобных фигурах соответствующие стороны пропорциональны
 .
.
В случаях, когда известны скорости двух точек звена, скорости всех остальных точек звена следует искать с помощью теоремы подобия. Необходимо иметь в виду, что при обходе вершин углов подобных фигур на звене и на плане скоростей в одном и том же направлении, например по часовой стрелке, последовательность расположения букв должна быть одинаковой.
2.2. Дано: 1. Линейные размеры звена CDE,
2.  и
и  ускорения точек С и D.
ускорения точек С и D.
План ускорений.
Требуется определить:  .
.
| |||
| |||
|
При решении задач на отыскание ускорений предполагаем, что все скорости известны. Ускорение  связано с ускорением
связано с ускорением  и
и  зависимостями:
зависимостями:
 ,
,
где  ;
;  .
.
 ,
,
где  ;
;  .
.
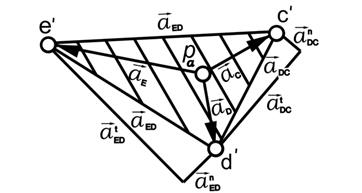
Строим план ускорений. Полные относительные ускорения могут быть найдены по известным из механики формулам:

 ,поскольку их соответствующие стороны пропорциональны.
,поскольку их соответствующие стороны пропорциональны.
Это свойство позволяет сформулировать теорему подобия для плана ускорений: полные относительные ускорения точек жесткого звена образуют на плане ускорений фигуру подобную самому звену (при одинаковом направлении обхода фигур чередование букв при вершинах должно быть одинаковым).
 .
.
Случай 3. Две точки совпадают в данный момент времени, но принадлежат различным звеньям, которые образуют между собой поступательную пару.
|
|
|
|
|
данный момент совпадают соответственно с точками А2 и В2расположенными на звене 2. В нашем случае точка А2расположена над точкой А1, и точка В2над B1.
При составлении векторных уравнений будем основываться на следующих соображениях:
3.1. Без ущерба для общности за переносное движение принимаем движение звена 1. Заметим, что с равным успехом можно было бы за переносное принять движение звена 2. Для точки А переносной будет скорость  , для точки В -
, для точки В -  . В общем случае
. В общем случае  .Но относительные скорости точек А2 и В2 при движении звена 2 по направляющей "HH" совпадают
.Но относительные скорости точек А2 и В2 при движении звена 2 по направляющей "HH" совпадают  , поскольку точка B2перемещается по прямой линии "XX" ||"HH". Следовательно
, поскольку точка B2перемещается по прямой линии "XX" ||"HH". Следовательно  ;
;
3.2. Так как звенья 1 и 2 образуют поступательную пару, то относительное вращение между ними отсутствует. Поэтому:  и
и  .
.
3.3 Переносные ускорения точек А и В в общем случае не совпадают  , но относительные ускорения равны по величине и направлению
, но относительные ускорения равны по величине и направлению  .Абсолютное ускорение точки В2 может быть найдено из уравнения:
.Абсолютное ускорение точки В2 может быть найдено из уравнения:
 ,
,
где  - кориолисово (поворотное) ускорение. Оно появляется в результате изменения направления относительной скорости и определяется в плоском движении по формуле:
- кориолисово (поворотное) ускорение. Оно появляется в результате изменения направления относительной скорости и определяется в плоском движении по формуле:  , где ω=ω1=ω2 угловая скорость переносного движения,
, где ω=ω1=ω2 угловая скорость переносного движения,  - относительная скорость.
- относительная скорость.
Направление ускорения  можно получить по правилу Н.Е. Жуковского. Для этого следует вектор
можно получить по правилу Н.Е. Жуковского. Для этого следует вектор  относительной скорости повернуть на 90° вокруг оси, параллельной оси переносного вращения в сторону вращения, обусловленного угловой скоростью ω.
относительной скорости повернуть на 90° вокруг оси, параллельной оси переносного вращения в сторону вращения, обусловленного угловой скоростью ω.
2.3. Определение скоростей и ускорений групп 2-го класса
методом планов.
Смотри таблицу 2.1.
Дата добавления: 2016-10-07; просмотров: 1591;
Поиск по сайту
Узнать еще
- Appeal –привлекательность.
- Applications (приложения)
- Cвойства определителей
- Cила резания при точении
- Cравнительная характеристика усилителей на БТ
- Cущность организации и ее основные признаки
- D-технология построения чертежа. Типовые объемные тела: призма, цилиндр, конус, сфера, тор, клин. Построение тел выдавливанием и вращением. Разрезы, сечения.
- D-элементы, их применение в медицине и фармации.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
