Устойчивость «обратного» объекта
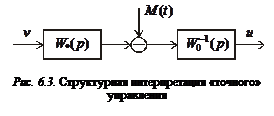 |
Это условие также предполагает исследование свойств объекта. Изобразим структурную схему, соответствующую выражению для «точного» управляющего воздействия (6.9). Как видим из рис. 6.3, «точный» регулятор включает в себя желаемую передаточную функцию системы и обратную модель объекта. Поскольку
 всегда имеет полюса с отрицательной вещественной частью, то устойчивость «точного» регулятора определяется устойчивостью обратной модели объекта.
всегда имеет полюса с отрицательной вещественной частью, то устойчивость «точного» регулятора определяется устойчивостью обратной модели объекта.
Отсюда следует второе условие разрешимости: задача синтеза будет иметь решение, если обратная модель объекта (6.3)  устойчива, что соответствует требованию
устойчива, что соответствует требованию
 (6.11)
(6.11)
для разрешимости задачи синтеза необходимо, чтобы все «нули» передаточной функции объекта (корни полинома  ) располагались в левой полуплоскости плоскости корней.
) располагались в левой полуплоскости плоскости корней.
Пример 6.1
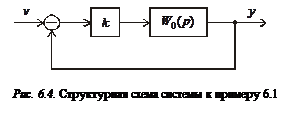 |
Рассмотрим проявление этого условия для системы, структурная схема которой приведена на рис. 6.4. Здесь k – коэффициент усиления регулятора;
 – передаточная функция объекта управления.
– передаточная функция объекта управления.
Запишем характеристическое уравнение системы
 .
.
Для уменьшения статической ошибки будем увеличивать коэффициент усиления регулятора. В пределе при  получим вырожденную систему, характеристическое уравнение которой принимает вид
получим вырожденную систему, характеристическое уравнение которой принимает вид

и ее устойчивость определяют «нули» передаточной функции
объекта.
Таким образом, (6.11) является необходимым условием устойчивости вырожденной системы и одновременно условием разрешимости задачи синтеза. Понятно, что для устойчивости замкнутой системы нужно анализировать все корни исходного характеристического уравнения.
Управляемость
Понятие управляемости используется при проверке условий разрешимости задачи синтеза для линейных систем, поведение которых описывают уравнения состояния.
Рассмотрим условие управляемости для общего класса объектов вида
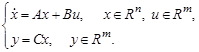 (6.12)
(6.12)
Объект (6.12) называется управляемым, если существует ограниченное управляющее воздействие  с помощью которого можно перевести его из начального состояния
с помощью которого можно перевести его из начального состояния  в заданное конечное
в заданное конечное  за конечное время T.
за конечное время T.
Проверяется это условие с помощью критерия управляемости, его формулировку приведем без доказательства [1]. Объект (6.12) будет управляем тогда и только тогда, когда матрица управ-
ляемости
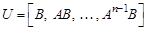 (6.13)
(6.13)
имеет полный ранг.
Так как матрица U имеет n строк и  столбцов, то критерий управляемости записывается в виде
столбцов, то критерий управляемости записывается в виде
 (6.14)
(6.14)
Определить, имеет ли матрица полный ранг, можно по соотно-шению
 (6.15)
(6.15)
которое легко проверить, например, с помощью пакета Matlab.
В случае одноканального объекта (когда  ) матрица управляемости будет квадратной и критерий (6.14) принимает форму
) матрица управляемости будет квадратной и критерий (6.14) принимает форму
 (6.16)
(6.16)
Отметим, что задача синтеза будет иметь решение, если объект управляем, т.е. условие управляемости является условием разрешимости задачи синтеза.
Однако невыполнение условия (6.14) еще не означает, что такой объект нельзя стабилизировать. В случае, когда  и объект (6.12) не полностью управляем, с помощью специального невырожденного преобразования переменных
и объект (6.12) не полностью управляем, с помощью специального невырожденного преобразования переменных

его описание можно привести к канонической форме
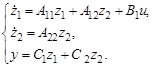 (6.17)
(6.17)
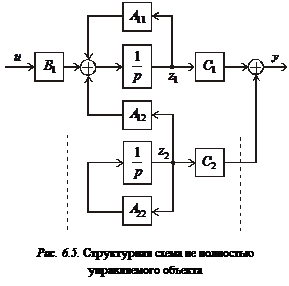 |
Здесь переменные
 характеризуют автономную часть объекта, называемую неуправляемой. Структурная схема такого объекта приведена на рис. 6.5. пунктиром выделена неуправляемая часть объекта, процессы в которой развиваются в силу собственных свойств. Изменить их с помощью управления невозможно, однако переменные влияют на управляемую часть и выходные переменные y. Если неуправляемая часть будет неустойчива, то и весь объект будет не только неустойчивым, но и нестабилизируемым.
характеризуют автономную часть объекта, называемую неуправляемой. Структурная схема такого объекта приведена на рис. 6.5. пунктиром выделена неуправляемая часть объекта, процессы в которой развиваются в силу собственных свойств. Изменить их с помощью управления невозможно, однако переменные влияют на управляемую часть и выходные переменные y. Если неуправляемая часть будет неустойчива, то и весь объект будет не только неустойчивым, но и нестабилизируемым.
Таким образом, для не полностью управляемого объекта условием разрешимости задачи синтеза является требование устойчивости неуправляемой части.
Пример 6.2
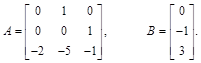
Проверить управляемость объекта, поведение которого описывает следующая система дифференциальных уравнений:
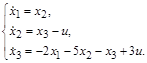
Определим матрицы
Запишем матрицу управляемости в виде 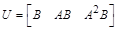 и вычислим матрицы произведений
и вычислим матрицы произведений
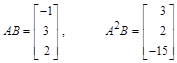 .
.
Составим матрицу управляемости

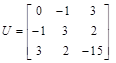
и найдем ее определитель  следовательно, объект управ-
следовательно, объект управ-
ляем.
Наблюдаемость
Это понятие отражает возможность оценки переменных состояния объекта (6.12) по результатам измерения выходных пере-менных.
Объект называется наблюдаемым, если в любой момент времени можно оценить состояние x по данным измерения выходных переменных  и управляющих воздействий
и управляющих воздействий  .
.
Условие проверяется с помощью критерия наблюдаемости, который приводится без доказательства [1, 3]. Объект (6.12) наблюдаем тогда и только тогда, когда матрица наблюдаемости
 (6.18)
(6.18)
имеет полный ранг, т. е.
 (6.19)
(6.19)
Это условие можно проверить по соотношению

В случае одноканального объекта критерий наблюдаемости (6.19) принимает вид
 (6.20)
(6.20)
Задача синтеза будет иметь решение, если объект наблюдаем,
т. е. условие наблюдаемости также является условием разрешимости задачи синтеза.
В случае, когда  , т. е. объект (6.12) не полностью наблюдаем, существует невырожденное преобразование переменных
, т. е. объект (6.12) не полностью наблюдаем, существует невырожденное преобразование переменных

которое позволяет уравнения (6.12) записать в форме
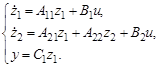 (6.21)
(6.21)
Здесь переменные характеризуют ненаблюдаемую часть объекта, структурная схема которого приведена на рис. 6.6.
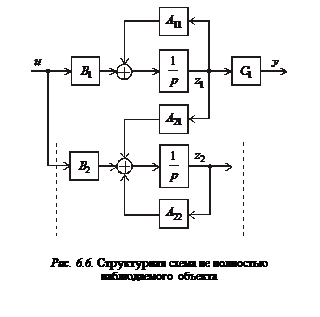 |
На схеме пунктиром выделена ненаблюдаемая часть. Если она неустойчива, то стабилизировать объект нельзя. Следовательно, в этом случае условие разрешимости задачи синтеза – устойчивость ненаблюдаемой части объекта.
Пример 6.3
Проверить наблюдаемость объекта управления «каретка – маятник», схематичная модель которого изображена на рис. 2.3. В при-
мере 2.5 получены матрицы объекта в виде
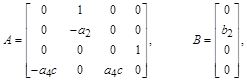
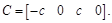
Составим матрицу наблюдаемости
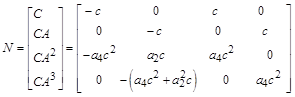
и определим ее детерминант. Так как  объект «каретка – маятник» является ненаблюдаемым.
объект «каретка – маятник» является ненаблюдаемым.
Дата добавления: 2020-10-25; просмотров: 337;
Поиск по сайту
Узнать еще
- А. Расчет на устойчивость
- Абсолютная устойчивость
- Аварии на объектах обустройства
- Аварии на пожаро- и взрывоопасных объектах
- Аварии на химически опасных объектах
- Актуальность и значимость создания доступного объекта социальной инфраструктуры.
- Анализ динамических характеристик объекта.
- Анализ объекта оценки и его окружения

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
