Функциональная схема СМС и её элементы.
1.1. Основные требования, предъявляемые к профессиональным системам подвижной связи.
В начале 1980-х в Европе наблюдался быстрый рост мобильной телефонной связи. Каждая страна разработала свою собственную систему, которые были несовместимы. Такая ситуация была нежелательна, потому что подвижная аппаратура не только была ограничена функциони рованием в пределах национальных границ, которых в объединённой Европе было все больше и больше, но очень ограничивало рынок для каждого типа оборудования. Страдали и сбыт, и окупаемость расходов на мобильную связь.
В 1982 г. Конференция европейских почт и телекоммуникаций (СЕРТ) сформировала группу GSM (Group Special Mobile) для изучения и разработки европейской мобильной наземной системы. Эта система должна была соответствовать следующим требованиям:
-хорошее субъективное качество речи;
-низкая стоимость оконечных устройств и обслуживания;
-поддержка международной подвижной связи;
-способность обслуживать малогабаритные терминалы;
-обеспечение диапазона новых услуг и средств;
-эффективное использование радиодиапазона;
-совместимость с ISDN.
1.2. Функциональная схема СМС и её элементы: подвижная станция, базовая станция, центр коммутации, интерфейсы мобильной связи и их стандартизация.
На рис.1.1 представлена классификация сетей подвижной связи Российской Федерации. В них включены наземные и спутниковые сети подвижной связи общего пользования, с помощью которых абонентам сети предоставляются различные услуги электросвязи, включая связь с абонентами телефонной сети общего пользования (ТФОП). Абоненты получают доступ в свою сеть с помощью подвижных абонентских терминалов, которые будем называть абонентскими станциями (АС), по радиоканалу между АС и базовой станцией (БС). Так организована сеть доступа. Между БС создается транспортная сеть с помощью радиолиний или кабельных линий связи. Сети доступа и транспортные сети вместе образуют сеть подвижной связи.
Взаимодействие с ТФОП возможно на любом иерархическом уровне: местном, внутризоновом и междугородном.
Наземные сети подвижной связи рассматриваются как основа сетей подвижной связи общего пользования. В тех регионах РФ, где возможен доступ одновременно в обе сети (наземные и спутниковые), абоненту преимущественно предоставляется канал связи через наземную сеть, а при выходе из зоны обслуживания наземной сети – через спутниковую сеть.
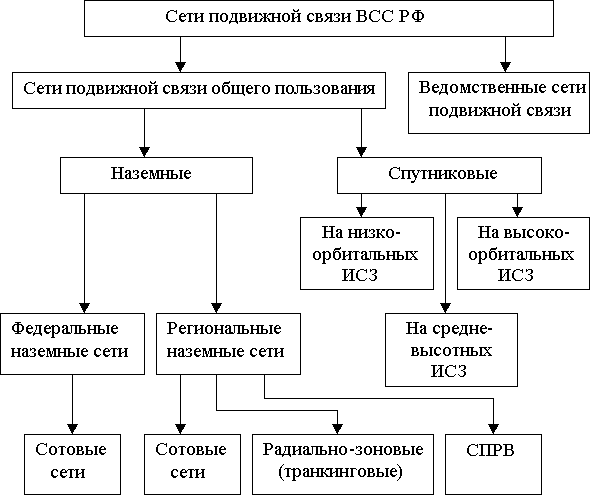
Рис. 1.1. Классификация сетей подвижной связи Российской Федерации
Спутниковые сети подвижной связи в первую очередь должны предоставлять услуги международной и междугородной связи. При этом спутниковые сети также могут поддерживать внутризоновую и местную связь. Спутниковые сети подвижной связи РФ классифицированы по видам используемых орбит искусственных спутников Земли (ИСЗ).
Наземные сети разделяют на федеральные и региональные. На основе аналогового стандарта NMT-450 и цифрового стандарта GSM-900, которые были приняты в качестве федеральных, в РФ организованы две федеральные сети. Абоненты этих сетей могут связываться друг с другом через ТФОП.
Нижняя строчка рис.1.1 отражает классификацию сетей по методу территориального планирования. Федеральные стандарты используют сотовый принцип деления территории.
Региональные сети рассматриваются как дополнение или временное замещение федеральных сетей, но при условии, что они не будут сдерживать развитие последних. Каждая региональная сеть обслуживает только своих абонентов.
В качестве региональных выступают сотовые сети стандартов AMPS/D-AMPS, радиальные и радиально-зоновые сети, включая транкинговые. Несколько радиальных линий связи можно объединить через центральную коммутационную станцию в радиально-зоновую структуру. Транкинговая сеть организуется на базе специальных систем радиосвязи, обеспечивающих многостанционный доступ к небольшому числу радиоканалов с ограниченным выходом в ТФОП либо без выхода в эту сеть, и используется в первую очередь для обслуживания абонентов ведомственных сетей.
К региональным наземным сетям относятся также сети персонального радиовызова (СПРВ). Персональный радиовызов (пейджинг) – это услуга электросвязи, заключающаяся в односторонней передаче коротких сообщений на ограниченной территории по радиоканалу. Региональные СПРВ должны включаться в ТФОП на местном уровне. Региональные СПРВ могут быть объединены в федеральные. Существуют стандарты для общеевропейской СПРВ.
В рассматриваемую классификацию сетей подвижной радиосвязи не включены беспроводные телефоны и беспроводные системы электросвязи - сухопутные подвижные службы, обеспечивающие связь в радиусе нескольких сотен метров. В беспроводных системах используется микросотовая и пикосотовая структура. Одна из основных областей их применения - это организация сети доступа для расширения возможностей сотовой региональной и федеральной сети.
Функциональная схема системы подвижной связи включает (рис.1.2): следующие элементы:
-подвижная станция;
-базовая станция;
-центр коммутации.
Система мобильной связи может включать более одного центра коммутации, что может быть обусловлено, в частности, эволюцией развития системы или ограниченностью емкости коммутатора. 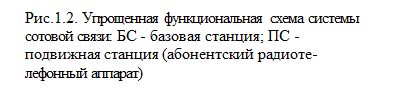
 В простейшей ситуации система содержит один центр коммутации (рис.1.2), при котором имеется домашний регистр, и она обслуживает относительно небольшую замкнутую территорию («небольшой город»), с которой не граничат территории, обслуживаемые другими системами. Если, условно говоря, «город побольше», то система может содержать два или более центров коммутации, из которых только при «головном» имеется домашний регистр, но обслуживаемая системой территория по-прежнему не граничит с территориями других систем. В обоих этих случаях при перемещении абонента между ячейками одной системы происходит передача обслуживания, а при перемещении на территорию другой системы - роминг.
В простейшей ситуации система содержит один центр коммутации (рис.1.2), при котором имеется домашний регистр, и она обслуживает относительно небольшую замкнутую территорию («небольшой город»), с которой не граничат территории, обслуживаемые другими системами. Если, условно говоря, «город побольше», то система может содержать два или более центров коммутации, из которых только при «головном» имеется домашний регистр, но обслуживаемая системой территория по-прежнему не граничит с территориями других систем. В обоих этих случаях при перемещении абонента между ячейками одной системы происходит передача обслуживания, а при перемещении на территорию другой системы - роминг.
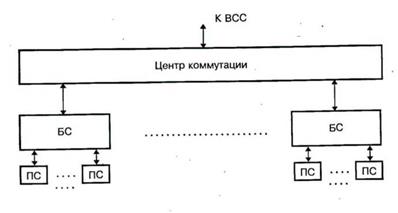
Блок-схема подвижной станции приведена на рис.1.3. В ее состав входят:
- блок управления;
- приемопередающий блок;
- 
 антенный блок.
антенный блок.
Приемопередающий блок, в свою очередь, включает передатчик, приемник, синтезатор частот и логический блок.
Наиболее прост по составу антенный блок: он включает собственно антенну - в простейшем случае четвертьволновой штырь - и коммутатор прием-передача. Последний для цифровой станции может представлять собой электронный коммутатор, подключающий антенну либо на выход передатчика, либо на вход приемника, поскольку, как будет ясно из дальнейшего, подвижная станция цифровой системы никогда не работает на прием и передачу одновременно.
Функционально несложен и блок управления. Он включает микротелефонную трубку - микрофон и динамик, клавиатуру и дисплей. Клавиатура (наборное поле с цифровыми и функциональными клавишами) служит для набора номера телефона вызываемого абонента, а также команд, определяющих режим работы подвижной станции. Дисплей служит для отображения различной информации, предусматриваемой устройством и режимом работы станции.
Приемопередающий блок значительно сложнее.
В состав передатчика входят: - аналого-цифровой преобразователь (АЦП) - преобразует в цифровую форму сигнал с выхода микрофона и вся последующая обработка и передача сигнала речи производится в цифровой форме, вплоть до обратного цифро-аналогового преобразования;
- кодер речи осуществляет кодирование сигнала речи преобразование сигнала, имеющего цифровую форму, по определенным законам с целью сокращения его избыточности, т.е. с целью сокращения объема информации, передаваемой по каналу связи;
- кодер канала - добавляет в цифровой сигнал, получаемый с выхода кодера речи, дополнительную (избыточную) информацию, предназначенную для защиты от ошибок при передаче сигнала по линии связи; с той же целью информация подвергается определенной переупаковке (перемежению); кроме того, кодер канала вводит в состав передаваемого сигнала информацию управления, поступающую от логического блока;
- модулятор - осуществляет перенос информации кодированного видеосигнала на несущую частоту.
Приемник по составу в основном соответствует передатчику, но с обратными функциями входящих в него блоков:
- демодулятор выделяет из модулированного радиосигнала кодированный видеосигнал, несущий информацию;
- декодер канала выделяет из входного потока управляющую информацию и направляет ее на логический блок; принятая информация проверяется на наличие ошибок, и выявленные ошибки по возможности исправляются; до последующей обработки принятая информация подвергается обратной (по отношению к кодеру) переупаковке;
- декодер речи восстанавливает поступающий на него с кодера канала сигнал речи, переводя его в естественную форму, со свойственной ему избыточностью, но в цифровом виде;
- цифро-аналоговый преобразователь (ЦАП) преобразует принятый сигнал речи в аналоговую форму и подает его на вход динамика;
- эквалайзер служит для частичной компенсации искажений сигнала вследствие многолучевого распространения; по существу, он является адаптивным фильтром, настраиваемым по обучающей последовательности символов, входящей в состав передаваемой информации; блок эквалайзера не является, вообще говоря, функционально необходимым и в некоторых случаях может отсутствовать.
Заметим, что для сочетания кодера и декодера иногда употребляют наименование кодек (например, канальный кодек, речевой кодек).
Помимо собственно передатчика и приемника, в приемопередающий блок входят логический блок и синтезатор частот. Логический блок - это по сути микрокомпьютер со своей оперативной и постоянной памятью, осуществляющий управление работой подвижной станции. Синтезатор является источником колебаний несущей частоты, используемой для передачи информации по радиоканалу. Наличие гетеродина и преобразователя частоты обусловлено тем, что для передачи и приема используются различные участки спектра (так называемое дуплексное разделение по частоте).
Блок-схема рис.1.3. является существенно упрощенной. На ней не показаны усилители, селектирующие цепи, генераторы сигналов синхрочастот и цепи их разводки, схемы контроля мощности на передачу и прием и управления ею, схема управления частотой генератора для работы на определенном частотном канале и т.п. Для обеспечения конфиденциальности передачи информации в некоторых системах возможно использование режима шифрования; в этих случаях передатчик и приемник подвижной станции включают соответственно блоки шифрования и дешифровки сообщений. В подвижной станции системы GSM предусмотрен специальный съемный модуль идентификации абонента (Subscriber Identity Module - SIM).
Подвижная станция системы GSM включает также так называемый детектор речевой активности (Voice Activity Detector), который в интересах экономного расходования энергии источника питания (уменьшения средней мощности излучения), а также снижения уровня помех, неизбежно создаваемых для других станций при работающем передатчике, включает работу передатчика на излучение только на те интервалы времени, когда абонент говорит. На время паузы в работе передатчика в приемный тракт дополнительно вводится так называемый комфортный шум
Базовая станция
Многие элементы, входящие в состав базовой станции, по функциональному назначению не отличаются от аналогичных элементов подвижной станции, но в целом базовая станция существенно больше и сложнее подвижной, что соответствует ее месту в системе сотовой связи.
Блок-схема базовой станции приведена на рис.1.4. Первая особенность базовой станции, которую следует отметить, - это использование разнесенного приема, для чего станция должна иметь две приемные антенны (на схеме рис.1.4 эта особенность не отражена). Кроме того, базовая станция может иметь раздельные антенны на передачу и на прием (схема рис.1.4 соответствует этому случаю). Вторая особенность - наличие нескольких приемников и такого же числа передатчиков, позволяющих вести одновременную работу на нескольких каналах с различными частотами.

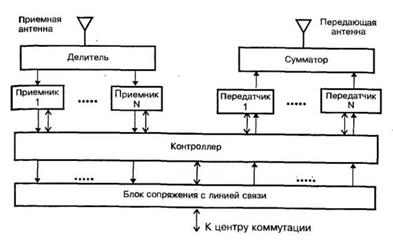 Одноименные приемники и передатчики имеют общие перестраиваемые опорные генераторы (не показанные на рис.1.4), обеспечивающие их согласованную перестройку при переходе с одного канала на другой; конкретное число N приемопередатчиков зависит от конструкции и комплектации базовой станции. Для обеспечения одновременной работы N приемников на одну приемную и N передатчиков на одну передающую антенну между приемной антенной и приемниками устанавливается делитель мощности на N выходов, а между передатчиками и передающей антенной -сумматор мощности на N входов.
Одноименные приемники и передатчики имеют общие перестраиваемые опорные генераторы (не показанные на рис.1.4), обеспечивающие их согласованную перестройку при переходе с одного канала на другой; конкретное число N приемопередатчиков зависит от конструкции и комплектации базовой станции. Для обеспечения одновременной работы N приемников на одну приемную и N передатчиков на одну передающую антенну между приемной антенной и приемниками устанавливается делитель мощности на N выходов, а между передатчиками и передающей антенной -сумматор мощности на N входов.
Приемник и передатчик имеют в общем ту же структуру, что и в подвижной станции (рис. 1.3), за исключением того, что здесь в них отсутствуют соответственно ЦАП и АЦП, поскольку и входной сигнал передатчика, и выходной сигнал приемника имеют цифровую форму. Возможны варианты, когда кодеки - либо только кодек речи, либо и кодек речи, и канальный кодек - конструктивно реализуются в составе центра коммутации, а не в составе приемопередатчиков базовой станции, хотя функционально они остаются элементами приемопередатчиков.
Блок сопряжения с линией связи осуществляет упаковку информации, передаваемой по линии связи на центр коммутации, и распаковку принимаемой от него информации. В качестве линии связи базовой станции с центром коммутации обычно используется радиорелейная или волоконно-оптическая линия, если базовая станция и центр коммутации не располагаются территориально в одном месте.
Контроллер базовой станции, представляющий собой достаточно мощный и совершенный компьютер, обеспечивает управление работой станции, а также контроль работоспособности всех входящих в нее блоков и узлов.
Для обеспечения достаточной степени надежности многие блоки и узлы базовой станции резервируются (дублируются), в состав станции включаются автономные источники бесперебойного питания (аккумуляторы). Поскольку аппаратура базовой станции потребляет значительную мощность, и соответственно выделяет заметное количество тепла, в ней предусматриваются специальные устройства охлаждения.
Центр коммутации
Центр коммутации является мозговым центром и одновременно диспетчерским пунктом системы сотовой связи, на который замыкаются потоки информации со всех базовых станций и через который осуществляется выход на другие сети связи - стационарную телефонную сеть, сети междугородной связи, спутниковой связи, другие сотовые сети. В состав центра коммутации входит несколько процессоров (контроллеров), и он является типичным примером многопроцессорной системы.

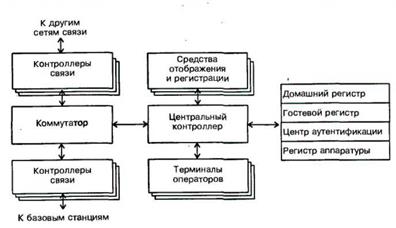
Блок-схема центра коммутации представлена на рис.1.5. Собственно коммутатор осуществляет переключение потоков информации между соответствующими линиями связи. Он может, в частности, направить поток информации от одной базовой станции другой, или от базовой станции к стационарной сети связи, или наоборот - от стационарной сети связи к нужной базовой станции.
Коммутатор подключается к линиям связи через соответст вующие контроллеры связи, осуществляющие промежуточную обработку
(упаковку/распаковку, буферное хранение) потоков информации. Общее управление работой центра коммутации и системы в целом производится от центрального контроллера, который имеет мощное математическое обеспечение, включающее перепрограммируемую часть (software). Работа центра коммутации предполагает активное участие операторов, поэтому в состав центра входят соответствующие терминалы, а также средства отображения и регистрации (документирования) информации. В частности, оператором вводятся данные об абонентах и условиях их обслуживания, исходные данные по режимам работы системы, в необходимых случаях оператор выдает требующиеся по ходу работы команды.
Важными элементами системы являются базы данных - домашний регистр, гостевой регистр, центр аутентификации, регистр аппаратуры (последний имеется не во всех системах). Домашний регистр (домашний регистр местоположения - Home Location Register, HLR) содержит сведения обо всех абонентах, зарегистрированных в данной системе, и о видах услуг, которые могут быть им оказаны (при заключении договора на обслуживание для разных абонентов может быть предусмотрено, вообще говоря, оказание различных наборов услуг). Здесь же фиксируется местоположение абонента для организации его вызова и регистрируются фактически оказанные услуги. Гостевой регистр (гостевой регистр местоположения - Visitor Location Register, VLR) содержит примерно такие же сведения об абонентах-гостях (ромерах), т.е. об абонентах, зарегистрированных в другой системе, но пользующихся в настоящее время услугами сотовой связи в данной системе.
В каждом стандарте сотовой связи используется несколько интерфейсов, в общем случае различных в разных стандартах.
Так, предусмотрены свои интерфейсы для связи подвижной станции с базовой, базовой станции - с центром коммутации (а в стандарте GSM - еще и отдельный интерфейс для связи приемопередатчика базовой станции с контроллером базовой станции), центра коммутации - с домашним регистром, с гостевым регистром, с регистром аппаратуры, со стационарной телефонной . сетью и другие. Все интерфейсы подлежат стандартизации для обеспечения совместимости аппаратуры разных фирм-изготовителей, что не исключает, однако, возможности использования различных интерфейсов, определяемых разными стандартами, для одного и того же информационного стыка. В некоторых случаях используются уже существующие стандартные интерфейсы, например, соответствующие протоколам обмена в цифровых информационных сетях.
Из всех интерфейсов, используемых в сотовой связи, один занимает особое место - это интерфейс обмена между подвижной и базовой станциями. Он носит наименование эфирного интер  фейса (английский термин air interface) и для обоих основных стандартов цифровой сотовой связи - D-AMPS и GSM - иногда обозначается одинаково - Um, хотя организован совершенно по-разному.
фейса (английский термин air interface) и для обоих основных стандартов цифровой сотовой связи - D-AMPS и GSM - иногда обозначается одинаково - Um, хотя организован совершенно по-разному.
Эфирный интерфейс обязательно используется в любой системе сотовой связи, при любой ее конфигурации и в единственном возможном для своего стандарта сотовой связи варианте. Последнее обстоятельство позволяет подвижной станции любой фирмы-изготовителя одинаково успешно работать совместно с базовой станцией той же или любой другой фирмы, что удобно для компаний-операторов и практически необходимо для организации ро-минга, в том числе международного. Стандарты эфирного интерфейса отрабатываются весьма тщательно, чтобы обеспечить возможно более эффективное использование полосы частот, выделенной для канала радиосвязи.
1.3. Архитектура и структура сетей систем мобильной связи.
Основные понятия. Главные элементы сотовой сухопутной подвижной системы электросвязи (ССПСЭ) – это центр коммутации подвижной службы (ЦКПС), а также станции (БС и АС). Все БС соединены со своим ЦКПС стационарными линиями связи (кабельными, радиорелейными и др.), а все ЦКПС сети – стационарными линиями с транзитными коммутаторами ТФОП и обмениваются информацией по общему каналу сигнализации ОКС 7.
Сотовые сухопутные подвижные системы электросвязи строят на основе частотно-территориальных планов (ЧТП). При составлении ЧТП обслуживаемую территорию разделяют между базовыми станциями. Если на БС используется всенаправленная антенна, то граница территории, которую обслуживает одна БС, – окружность, в центре которой располагается БС. Границы трех соседних окружностей пересекаются в одной точке. Соединив точки пересечения окружностей, уточним границы территории, которую обслуживает каждая БС. Получается шестиугольник – сота.
Итак, сота – это территория, обслуживаемая одной БС при всенаправленных антеннах. Каждая БС поддерживает радиосвязь с абонентскими станциями, находящимися в своей соте. Во избежание взаимных помех, соседние БС работают на разных частотах. Каждой соте присваивается частотная группа и для всей ССПСЭ составляется частотно-территориальный план.
Основой ЧТП является кластер. Кластер образован совокупностью соседних сот, в которых используются разные частотные группы. Частотные группы внутри кластера не повторяются. Число таких сот в кластере называется его размерностью. Все частотные каналы системы делят между БС, входящими в один кластер.
Сотовая структура может быть двух типов:
• регулярная, использующая всенаправленные антенны ;
• секторная на основе направленных антенн.
В качестве направленных антенн на БС используются секторные антенны. Получили распространение секторные антенны с шириной главного лепестка ДНА (a), равной 60, 90 или 120°. В этом случае(120о) сота делится на три сектора А, В, С. В каждом секторе устанавливается своя БС, причем в центре соты. Каждая БС работает на своей частоте. Частотные группы обозначены 1А, 1В, …..
Как правило, в центре соты устанавливается несколько антенн. Это может быть три передающие антенны, две – шесть приемных (для разнесенного приема) и две антенны радиорелейных линий (РРЛ). Место размещения БС получило название «сайт» (от англ. site - местоположение).
При шестиугольной соте удобно использовать кластер размерностью 7. В этом случае можно выбрать разные частотные группы в одной центральной соте и шести пограничных сотах. ЧТП составляют так, чтобы уровень интерференционных помех не превышал допустимых значений, что позволяет многократно повторять кластер и реализовать достоинства сотовых систем. Например, если в подвижной системе используется 119 частотных каналов (Nч = 119) и кластер размерностью 7 (Nкл = 7), то число частотных каналов, содержащихся в частотной группе в одной соте, определяется по формуле Nчк = Nкл / Nкл = 119/7 = 17.
Основное достоинство любых сотовых систем – эффективное использование выделенной полосы частот за счет многократного повторения кластера на территории. Такой подход позволяет обслуживать большое число абонентов при ограниченном частотном ресурсе спектра.
В зависимости от радиуса соты r0 различают макросоты с r0≥0,5 км, микросоты с r0<0,5 км и пикосоты, радиусом несколько десятков метров. Макросоты предназначены для обслуживания абонентов в быстро передвигающемся транспорте, микросоты и пикосоты целесообразны при медленном перемещении абонентов. Микросоты были реализованы впервые в системах беспроводных телефонов. Пикосоты служат для обслуживания абонентов в городских районах с большой плотностью населения и в закрытых зонах (подземные гаражи, вокзалы, универмаги).
Область обслуживания ЦКПС разделяется на зоны обслуживания. Например, в стандарте NМТ-450 область обслуживания одного ЦКПС содержит 16 зон, в каждой зоне находится до 128 БС, всего в области обслуживания одного ЦКПС может быть до 1024 БС. Адрес (номер) зоны обслуживания базовая станция непрерывно передает по каналу управления. Этот номер принимается абонентской станцией и записывается в ее память. АС оценивает принимаемый сигнал и при необходимости инициирует процедуру обновления информации о своем местоположении, которое определяется с точностью до зоны, а не до соты. Деление на зоны уменьшает время поиска абонентской станции.
1.4. Основные типы систем связи с подвижными объектами.
Различают следующие типы систем связи с подвижными объектами:
- транкинговые системы связи;
- системы персонального радиовызова;
- системы персональной спутниковой связи;
- сотовые системы связи с подвижными объектами.
Рссмотрим особенности этих систем.
1.5. Транкинговые системы связи.
Транкинговые системы радиосвязи (ТСР) являются развитием систем низовой полудуплексной радиосвязи и по ряду признаков могут быть соотнесены с сотовыми системами связи. В отличие от обычных систем с постоянно закрепленными частотными каналами в ТСР применяется динамическое распределение каналов. Термин транкинг, принятый в сфере профессиональной радиосвязи, означает метод свободного доступа большого числа абонентов к ограниченному числу каналов (пучку, стволу или, по зарубежной терминологии, – транку). Поскольку в какой-либо момент времени не все абоненты активны, необходимое число каналов значительно меньше общего числа абонентов.
Когда радиоабонент транкинговой системы осуществляет вызов, система назначает ему один из имеющихся свободных каналов. При этом статистика активности обычно такова, что небольшого количества выделенных каналов достаточно для обслуживания значительного числа абонентов.
В отличие от обычных систем радиосвязи ТСР характеризуются следующими признаками:
• экономное использование радиоспектра;
• наличие одной или нескольких базовой радиостанций и системы управления;
• возможность выхода в другие сети, в частности в телефонную сеть общего пользования;
• увеличение зоны обслуживания путем создания многозоновой сети;
• передача данных и телеметрической информации;
• множество сервисных возможностей.
Перечисленные выше признаки характерны и для сотовых систем связи.
Однако в отличие от сотовых транкинговые системы в первую очередь ориентированы на задачи, связанные с оперативным управлением. Список потребителей здесь чрезвычайно широк – подразделения железных и автомобильных дорог, предприятия энергетического комплекса, администрации всех уровней, учреждения городского хозяйства, правоохранительные органы, отряды МЧС, коммерческие структуры и т.д.
В сравнении с сотовыми системами к преимуществам ТСР, позволяющим отдать им предпочтение при организации оперативной связи, следует отнести:
• гибкую систему вызовов – индивидуальный, групповой, вещательный, приоритетный, аварийный и др.;
• гибкую систему нумерации – от коротких двух или трехзначных до полноценных городских номеров;
• малое время установления соединения – менее секунды, против нескольких секунд в сотовых системах;
• возможность работы в группе;
• наличие (в ряде систем) режима непосредственной связи между двумя абонентскими радиостанциями без участия базовой;
• экономичность – по стоимости оборудования и по эксплуатационным расходам ТСР в несколько раз экономичнее сотовых систем.
Сравнивая сотовые и транкинговые системы, необходимо отметить, что при внешней структурной схожести они существенно отличаются по ряду функциональных особенностей и системных возможностей. Если первые ориентированы на потребителей обычных телефонных услуг и окупаются в регионах с высокой плотностью населения (порядка тысячи и более абонентов в зоне), то вторые, прежде всего, являются средством оперативной и производственно-технологической связи и рентабельны при на порядок меньшем числе абонентов.
Следует заметить, что сами термины «сотовые» или «транкинговые системы» малоинформативны с точки зрения выявления их отличий. Так, в сотовых системах используется метод динамического распределения каналов, т.е. транкинг, и наоборот, современные многозоновые транкинговые системы содержат ряд «родовых» признаков сотовых систем. Эти термины сложились исторически и обозначают системы мобильной радиосвязи, которые развивались своими путями, решая разные задачи.
Для более полного представления о функциональных возможностях ТСР перечислим основные типы вызовов, поддерживаемые большинством стандартных протоколов:
• индивидуальный вызов для связи между двумя абонентами;
• групповой вызов для связи между несколькими абонентами одновременно;
• вещательный вызов для предварительно выбранной группы, когда абоненты могут только слушать сообщение, но не могут отвечать;
• конференц-вызов для подключения к разговору третьего абонента во время разговора двух абонентов;
• переадресация вызова: вызовы, адресованные абоненту, автоматически переадресуются заранее назначенному третьему абоненту;
• приоритетный вызов применяется для сокращения времени ожидания при занятости системы; такие вызовы обслуживаются вне общей очереди;
• срочный (аварийный) вызов имеет наивысший приоритет, связь устанавливается немедленно путем прерывания уже установленных соединений;
• статусная связь – посылка коротких текстовых сообщений любому другому абоненту или диспетчеру;
• передача блоков данных применяется для связи между компьютерами или другими системами обработки цифровой информации;
• диспетчерская связь – вызовы на специально сконфигурированные диспетчерские пульты;
• исходящие и входящие вызовы для абонентов телефонной сети обеспечивают взаимодействие радиоабонентов с абонентами ведомственной сети или сетью общего пользования.
Благодаря перечисленным особенностям транкинговые системы заняли самостоятельную нишу на рынке оборудования средств радиосвязи. Многие ведущие фирмы – Motorola, Nokia, Ericsson и др. – наряду с обычными радиостанциями производят также и сотовое, и транкинговое оборудование, ориентированное на соответствующие секторы этого рынка.
Цифровые транкинговые системы предоставляют своим пользователям ряд преимуществ перед аналоговыми системами.
• Конфиденциальность переговоров. Применение криптостойких алгоритмов скремблирования позволяет обеспечить гарантированную защиту от прослушивания информации, что очень важно для большинства пользователей транкинговой связи. При этом в отличие от аналоговых методов шифрования, качество восстановленного сигнала не ухудшается.
• Эффективное использование радиочастотного спектра. Применение низкоскоростных кодеров речи (вокодеров) в сочетании с методами цифровой модуляции и цифровыми технологиями множественного доступа позволяет по сравнению с аналоговыми системами более эффективно использовать полосу частот.
• Помехоустойчивая ретрансляция сигналов. В аналоговых системах промежуточные ретрансляторы усиливают радиосигнал, но не «очищают» его от помех канала. В результате при многократной ретрансляции шумы накапливаются, и качество сигнала значительно ухудшается. Наоборот, в цифровых ретрансляторах происходит восстановление сигнала, в результате чего качество связи практически не зависит от размеров зоны обслуживания.
• Эффективная передача данных. При передаче данных по цифровым каналам нет необходимости в применении специальных модемов.
В настоящее время выпускается целый ряд цифровых транкинговых систем. Однако наибольшие перспективы связываются с применением стандарта TETRA.
1.6. Системы персонального радиовызова.
Функциональная схема системы персонального радиовызова. СПРВ обеспечивает одностороннюю передачу коротких сообщений на ограниченной территории по радиоканалу. Эта услуга электросвязи известна также под названием «пейджинг». Информация для передачи может поступать через различные сети. Например, широко распространены системы, в которых диспетчер сети получает речевую информацию по телефону из ТФОП. Основные технические характеристики радиоинтерфейса СПРВ определяются форматом кодов сигналов радиовызова.
В зависимости от используемых радиоканалов различают СПРВ со специально выделенными радиоканалами и системы с каналами, полученными при уплотнении существующих вещательных радиоканалов.
Существует множество форматов кодов СПРВ. С 1992 г. в Европе широкое признание получил цифровой формат ERMES (European Radio Messaging System). Этот общеевропейский формат позволяет организовать общую сеть персонального радиовызова для всех стран и общеевропейский роуминг. Функциональная схема СПРВ на базе ERMES (рис.10.10) содержит базовые станции (БС); контроллер зоны обслуживания (КЗО); контроллер сети; центр эксплуатации и технического обслуживания (ЦЭТО). Цифрами 1.1,...,1.6 обозначены интерфейсы, которые должны отвечать определенным протоколам взаимодействия.
Вызовы могут поступать из различных сетей общего пользования, например ТФОП, ЦСИС и др. Взаимодействие обеспечивают сетевые протоколы 1.6 и протокол 1.5 – «методы доступа». Несколько контроллеров СПРВ соединяются между собой через интерфейс 1.4. Контроллер сети распределяет вызовы между зонами, затем КЗО подает их на радиопередатчики БС. КЗО не только распределяет вызовы между передатчиками, но также выполняет оперативные статистические вычисления.
Рис. 10.10. Функциональная схема системы персонального радиовызова
Радиопередатчики БС могут работать, как а синхронном режиме, так и последовательно во времени Абонент получает звуковой сигнал – уведомление о вызове и читает текст сообщения на дисплее абонентского приемника. В простейших СПРВ это может быть только код вызывающей стороны, и абонент получает сообщение по ТФОП, позвонив адресату. Виды и объем сообщений разделяются по категориям обслуживания. Категория 1 (самая низкая) обеспечивает только передачу вызова; категория 6 (самая высокая) – передачу вызова с большим объемом сообщений до нескольких десятков килобитов.
1.7. Системы персональной спутниковой связи.
Функциональная схема спутниковой системы подвижной связи. Спутниковая система подвижной связи (ССПС) содержит: космический сегмент, земной сегмент, линии радиосвязи и абонентские терминалы (АТ). Космический сегмент образуют ретрансляторы на ИСЗ. В земной сегмент входят базовые земные станции (БЗС), центр управления сетью (ЦУС) и центр управления полетом (ЦУП). ЦУС планирует использование ресурсов спутника в системе, распределяет ресурсы ретрансляторов ИСЗ между БЗС, обеспечивает БЗС данными для слежения за ИСЗ. Он же планирует трафик.
Центр управления полетом контролирует орбиты ИСЗ, обрабатывает телеметрию, формирует команды, передает на ЦУС сведения о состоянии и ресурсе ИСЗ. Как правило, центры подключены к одной из БЗС и не имеют собственного радиотехнического оборудования. Вся телеметрия и управление выполняются через БЗС по радиоканалам. БЗС также называют станциями сопряжения или шлюзовыми станциями. Все соединения между абонентами спутниковой системы выполняются через БЗС. Для этого в схеме БЗС предусмотрены интерфейсы. Часто БЗС соединяются линиями связи с ЦКПС ССПСЭ.
Линии радиосвязи подразделяются на мобильные, фидерные, межспутниковые, командные и телеметрические. Мобильные – это линии радиосвязи с абонентскими терминалами. В некоторых спутниковых системах связи организованы межспутниковые линии между соседними ретрансляторами на одной орбите и на соседних орбитах. Командные и телеметрические линии как правило совмещены с фидерными.
Абонентские терминалы подразделяют на портативные, перевозимые и стационарные. По техническим возможностям это может быть однорежимный терминал, который может работать только в спутниковых системах подвижной связи, двухрежимный и многорежимный. Двухрежимный позволяет работать как в указанной сети, так и в ССПСЭ определенного стандарта, например GSM. Многорежимный абонентский терминал позволяет работать в спутниковых системах подвижной связи и в ССПСЭ нескольких стандартов.
1.8. Сотовые системы связи с подвижными объектами.
Сотовые сухопутные подвижные системы электросвязи подразделяют по поколениям. Первое поколение – это системы аналоговых стандартов. Второе поколение представлено системами цифровых стандартов. Наконец, IMT-2000 рассматривается сегодня как стандарт подвижной системы электросвязи третьего поколения. Примеры стандартов приведены в табл. 1.1.
Дата добавления: 2016-07-22; просмотров: 6035;
Поиск по сайту
Узнать еще
- A Схема затяжки болтов ГБЦ; болты 5 и 7 длиннее остальных и устанавливаются в свои места
- II. Электрическая схема и принцип действия.
- III. Схема замещения и векторная диаграмма асинхронного двигателя
- Pис. 2.23. Схема межсистемных венозных анастомозов (схема).
- V. Упрощенная схема замещения трансформатора и внешняя характеристика.
- А – схема структурная; б – схема эквивалентная
- Агрегація криптографічних перетворень, криптографічна схема
- Алгоритм решения задач кинематики вращательного движения НМС вокруг неподвижной оси – схема алгоритма К03 ВДТ с комментариями и примерами

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
