Статические характеристики и погрешности измерительных преобразователей (ИП)
Основная статическая характеристика ИП – функция преобразования.
Функция преобразования– это функциональная зависимость выходной величины от входной.
 |
Эта зависимость может описываться аналитически, графически или в виде таблицы.
В случае аналитического описания будем писать y=F(x).Обычно стремятся иметь линейную функцию преобразования.
Различают три вида функции преобразования:
Номинальная – указывается в документации на ИП.
Индивидуальная – устанавливается путём экспериментальных исследований данного экземпляра ИП при определённых значениях влияющих величин.
Действительная (реальная) – реализуется в данных условиях, в данное время, в данном месте.
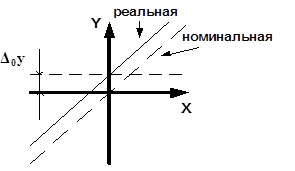
Отклонение реальной функции преобразования от номинальной составляет погрешность СИ или ИП. Эта погрешность называют инструментальной. Обычно рассматривают четыре вида отклонений:
1. Сдвиг реальной функции преобразования от номинальной
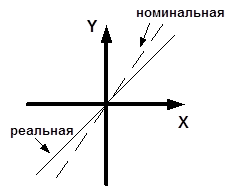
2. Изменение чувствительности ИП
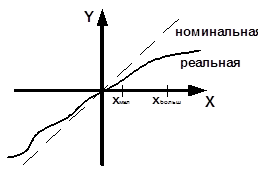
3. Наличие нелинейности функции преобразования
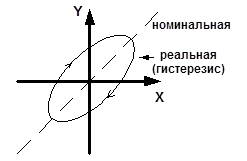
4. Гистерезис
§ 3. Характеристики ИП в динамическом режиме.
Динамическими называют такие характеристики ИП, которые проявляются лишь при работе преобразователя в динамическом режиме, т. е. при преобразованиях переменных во времени величин. Динамические характеристики описывают свойства измерительного преобразователя при быстрых изменениях измеряемой величины.
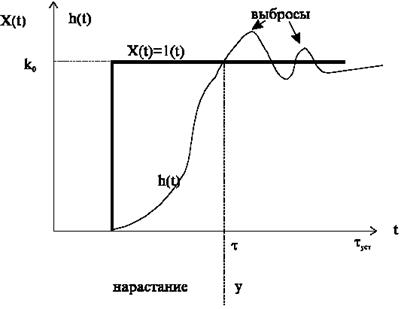
На практике используют реакцию Y(t) ИП на типовые входные сигналы и начальные условия: воздействие в виде единичного скачка или короткого импульса и линейно нарастающее или синусоидальное воздействие.
Реакция ИП с нулевыми начальными условиями на воздействие в виде единичного скачка 1(t) называется переходной функцией h(t). Скорость приближения переходной функции к установившемуся значению является мерой инерционности ИП.
Реакция преобразователя на воздействие в виде короткого импульса единичной площади X(t) = δ(t) называется импульсной переходной функцией, или функцией веса g(t).
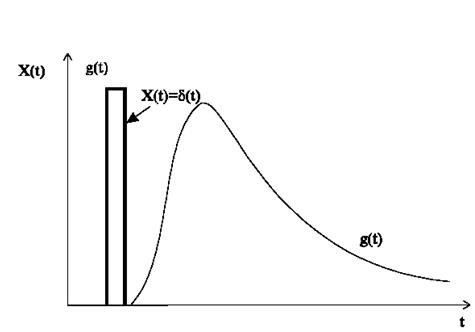
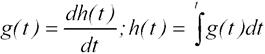 Между переходной функцией и функцией веса существует зависимость:
Между переходной функцией и функцией веса существует зависимость:
Переходная и весовая функции могут быть применены для определения реакции ИП на любое реальное воздействие X(t) сложной формы, представляемое в виде последовательности примыкающих друг к другу элементарных воздействий.
Погрешностью преобразователя в динамическом режиме называют погрешность, присущую ему при преобразовании переменных во времени величин.
Динамической погрешностью считают разность между погрешностью в динамическом режиме и его статической погрешностью.
Динамические погрешности обусловлены инерционными свойствами преобразователя и поэтому их значения зависят от скорости изменения преобразуемой величины.
Параметрами, характеризующими динамические свойства ИП, являются:
Время преобразования tп - такое время, по истечении которого динамическая погрешность становится равной допустимой.
Граничная частота преобразования ωгр- такая частота сигнала, при которой динамическая погрешность становится равной допустимой.
Динамический диапазон - область входных величин, преобразуемая ИП без заметных искажений.
Тема 2. Параметрические измерительные
преобразователи
Впараметрических преобразователях выходной величиной является параметр электрической цепи (R, L, M, C). При использовании параметрических преобразователей необходим дополнительный источник питания. Параметрические преобразователи весьма разнообразны по своему устройству, назначению и областям применения. Ниже приводятся описание физических принципов и устройства параметрических преобразователей, получивших наибольшее практическое применение.
§ 4. Реостатные преобразователи -основаны на изменении электрического сопротивления проводника под влиянием входной величины - перемещения.
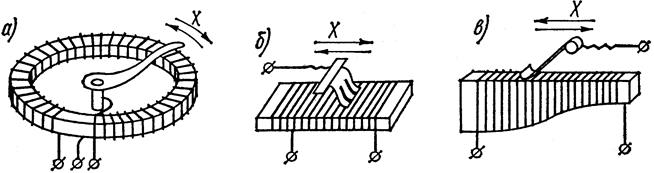
Реостатный преобразователь, как показывает само название, представляет собой в простейшем случае реостат, щетка (движок) которого перемещается под воздействием измеряемой неэлектрической величины. На рис. схематически показаны некоторые варианты конструкций реостатных преобразователей для углового и линейного перемещений.
Преобразователь состоит из обмотки, нанесённой на каркас, и щётки. Для изготовления каркаса применяют диэлектрики (пластмасса, керамика) и металлы (дюралюминий с анодированной поверхностью). Проволока выполняется из различных сплавов (константан, нихром, фехраль). Для обмотки используется изолированный эмалью или оксидной плёнкой провод. В местах соприкосновения со щёткой изоляцию счищают.
Зависимость изменения сопротивления от перемещения щётки имеет ступенчатый характер. Это вызывает погрешность преобразования:
γ = ΔR/R.
Чтобы исключить эту погрешность, иногда применяют конструкции, в которых щетка скользит вдоль оси проволоки.
Выходной параметр реостатных преобразователей - сопротивление - измеряется обычно с помощью мостовой схемы.
Достоинства преобразователей - возможность получения высокой точности, значительных по уровню выходных сигналов и относительная простота конструкции.
Недостатки - наличие скользящего контакта, необходимость относительно больших перемещений движка, а иногда и значительного усилия для его перемещения.
Применяются реостатные преобразователи для преобразования сравнительно больших перемещений (угловых, линейных) и других неэлектрических величин (усилия, давления и т. д.), которые могут быть преобразованы в перемещение.
Дата добавления: 2020-10-14; просмотров: 235;
Поиск по сайту
Узнать еще
- I. Погрешности механической обработки. Точность обработки. Методы их расчёта
- II. Основные характеристики микроскопа.
- III. Биогеохимические циклы элементов и веществ (на примере основных биогенных элементов: углерод, азот, фосфор) и их количественные характеристики.
- III. Характеристики основных классов загрязняющих веществ в водной среде.
- SWOT- анализ: характеристики при оценке сильных, слабых сторон компании, ее возможностей и угроз
- XXVII. ОБЩИЕ ХАРАКТЕРИСТИКИ ГРИБОВ
- А.2 Виды адсорбентов и их характеристики
- Абсолютная и относительная погрешности

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
