Структура электропривода
Электропривод (рисунок 2) состоит из: преобразователя 1, электродвигателя или группы электродвигателей 2, передаточного 3, управляющего 4 и рабочего 5 ор ганов
. 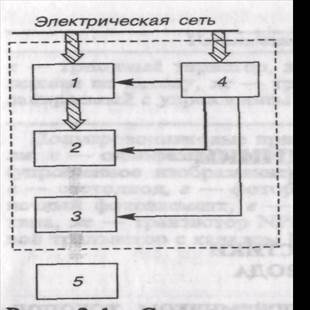
Рисунок 2- Структурная схема электропривода
Электрическую энергию электропривод преобразует в механическую и обеспечивает управление преобразованной энергией в соответствии с технологическими требованиями к режимам работы механизма. В простейшем случае электропривод представляет собой двигатель, питаемый от сети и приводящий в движение с постоянной скоростью какой-либо механизм. Для включения двигателя в сеть применяют обычный магнитный пускатель, контактор, рубильник или пакетный выключатель.
В зависимости от способа передачи энергии от двигателя к рабочим органам механизмов электроприводы бывают:
- групповые (один двигатель приводит в движение с помощью трансмиссий или передач группу рабочих машин или рабочих органов одной машины);
- индивидуальные (двигатель приводит в движение только один рабочий орган машины); Электропривод центробежного насоса — индивидуальный. По сравнению с групповым индивидуальный привод позволяет упростить кинематическую схему рабочей машины. Иногда двигатель встраива-ют в механизм так, что он образует с рабочим органом единое целое
-многодвигательные (отдельные рабочие органы машины приводятся в движение самостоятельным двигателем через систему передачи).
Совокупность связанных между собой электромагнитных, электромеханических, полупроводниковых и подобных им элементов называют системой управления приводом.
Движение электропривода, как и всякого механизма, подчиняется законам динамики и определяется силами (моментами), действующими в этой системе. Вращающий момент Мт, развиваемый электродвигателем, в любой момент времени уравновешивается суммой момента статического сопротивления Мc и динамического (инерционного) момента МДИН,
 (1)
(1)
Это уравнение называют уравнением движения электропривода. Вращающий момент электродвигателя считают положительным, если он направлен в сторону движения механизма, и отрицательным, если он препятствует его движению. Последний называют тормозным моментом.
Статический момент, приложенный к валу двигателя, проявляется в полезной работе, совершаемой механизмом, и работе сил трения. Динамический момент проявляется только во время переходных процессов, т. е. таких процессов, когда изменяются частота вращения электропривода и запас энергии движения в нем. Если вращающий момент электродвигателя и момент статического сопротивления системы находятся в состоянии динамического равновесия частота вращения электропривода не меняется. При нарушении равновесия между вращающим моментом электродвигателя и моментом статического сопротивления частота вращения электродвигателя начинает изменяться:
-если Мт>Мс, привод ускоряет свое движение, т. е. частота его вращения увеличивается;
-если Мт<М„ то привод замедляет свое движение, т. е. частота его вращения снижается.
Величина династического момента определяется разностью между вращающим моментом электродвигателя и моментом статического сопротивления.
Дата добавления: 2020-10-14; просмотров: 280;
Поиск по сайту
Узнать еще
- I. Государственный бюджет и его структура. три состояния государственного бюджета.
- I. Определение и структура методов обучения.
- I. Социальная структура дореволюционной России
- I. СТРУКТУРА СОВРЕМЕННЫХ НАЛОГОВЫХ СИСТЕМ.
- II. Социальная структура советской России
- III. Организационная структура ВСМК
- III. Социальная структура современной постсоветской России
- III. СТРУКТУРА И ОРГАНИЗАЦИЯ ДЕЯТЕЛЬНОСТИ

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
