Кинематические пары и их классификация
Первым этапом образования механизмов является соединение двух звеньев. Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
На относительное движение каждого звена кинематической пары накладываются ограничения, зависящие от способа соединения звеньев пары. Эти ограничения называются условиями связи (S).
Всякое звено в пространстве имеет шесть степеней свободы. Положение его фиксируется девятью координатами (хА, уА, zА), (хВ, уВ, zВ) и (хС, уС, zС). Относительно осей оно обладает тремя вращениями вокруг осей х, у, z и тремя поступательными движениями вдоль тех же осей (рис. 1.2).
 Рис. 1.2
Рис. 1.2
| Число условий связи (S) может быть только целым числом и должно быть меньше шести, так как, если оно будет равно шести, то кинематическая пара превратится в жесткое соединение двух звеньев. Число условий связи (S) не может быть меньше единицы, так как звенья не будут соприкасаться, и кинематическая пара перестанет существовать. Таким образом, 1 ≤ S ≤ 5, значит число степе- |
ней свободы звена (Н) можно выразить зависимостью
 . (1.1)
. (1.1)
1.2.1. Все кинематические пары делятся на к л а с с ы в зависимости от числа условий связи, налагаемых ими на относительное движение их звеньев. Так как число условий связи может быть от 1 до 5, то число классов пар равно 5 (I, II, III, IV, V). Класс кинематической пары определяется числом наложенных условий связи (S)
 . (1.2)
. (1.2)
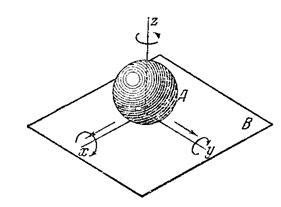 Рис. 1.3
Рис. 1.3
| Рассмотрим примеры. На рис. 1.3 представлена кинематическая пара в виде шара А, перекатывающегося по плоскости В. Движение шара относительно плоскости может быть разложено на три вращения вокруг осей х, у, z и движение по плоскости В, но только вдоль осей х и у, так как движение вдоль оси z нарушит соприкосновение звеньев, и кинематическая пара перестанет существовать. В этом случае |
число степеней свободы звеньев равно 5, а число условий связи определяется так:
Поэтому пара на рис. 1.3 относится к парам I класса.
Примером пары II класса является цилиндр А, находящийся на плоскости В (рис. 1.4). Движение цилиндра А относительно плоскости В сводится к враще-
 Рис. 1.4
Рис. 1.4
 Рис. 1.5
Рис. 1.5
| нию вокруг осей х и z и скольжению вдоль осей х и у. Таким образом, число возможных движений равно 4 (Н = 4), а невозможных – 2. То есть число условий связи равно:
 .
Это четырехподвижная пара относится к парам II класса.
На рис. 1.5 показан пример пары III класса. Звено А с шаром на конце соприкасается с шаровой плоскостью В. Относительно осей звено А может только вращаться. Значит, число степеней свободы Н равно 3 и число условий связи S равно 3, т. е. пара III класса трехподвижная, шаровая, сферическая. .
Это четырехподвижная пара относится к парам II класса.
На рис. 1.5 показан пример пары III класса. Звено А с шаром на конце соприкасается с шаровой плоскостью В. Относительно осей звено А может только вращаться. Значит, число степеней свободы Н равно 3 и число условий связи S равно 3, т. е. пара III класса трехподвижная, шаровая, сферическая.
| |
 Рис. 1.6
Рис. 1.6
 Рис. 1.7
Рис. 1.7
 Рис. 1.8
Рис. 1.8
| Пример пары IV класса представлен на рис. 1.6. Звено А (цилиндр) находится в полом цилиндре В и может относительно него скользить вдоль оси х или вращаться вокруг оси х. В этом случае Н = 2, S = 4, двух подвижная пара IV класса. Наконец, если одно звено А относительно звена В перемещается только вдоль оси х (рис. 1.7), это будет одноподвижная пара с Н = 1 и S = 5. Такая пара относится к парам V класса. К парам V класса относится и винтовая пара (рис. 1.8). Звенья пары А и В имеют и поступательное, и вращательное движение относительно оси х. Эти два движения связаны условием: если звено В не будет вращаться, то и не будет перемещаться относительно звена А. | |
Внутри каждого класса кинематические пары подразделяются на виды в зависимости от различных сочетаний допускаемых или ограниченных в них движений.
1.2.2. Кинематические пары делятся на в ы с ш и е и н и з ш и е. Кинематическая пара, которая может быть выполнена соприкосновением элементов ее звена только по линиям или в точках, называется высшей. На рис. 1.3 и 1.4 изображены высшие кинематические пары, а на рис. 1.5, 1.6, 1.7, 1.8 – низшие кинематические пары, т. к. эти пары образованы соприкосновением элементов звеньев пары по поверхности.
Чтобы элементы кинематических пар находились в постоянном соприкосновении, они должны быть замкнуты. Замыкание может быть геометрическим или силовым. Кинематические пары, изображенные на рис. 1.5-1.8, замкнуты геометрически, так как касание элементов звеньев этих пар обеспечивается их геометрическими формами, а чтобы пары, показанные на рис. 1.3 и 1.4, были замкнуты, шар и цилиндр необходимо прижимать к плоскости силой, это силовое замыкание. Силовое замыкание осуществляется силой веса, силой упругости пружин и другими способами.
Условные обозначения кинематических пар показаны в табл. 1.1.
Таблица 1.1
Классификация кинематических пар
| Условное обозначение | Класс пары | Количество | Примеры кинематических пар | ||
| связей | Степеней свободы | ||||

| I | S=1 | W=5 | 
| |

| II | S=2 | W=4 | 
| |

| III | S=3 | W=3 | 
| |

| IV | S=4 | W=2 | 
| |

| V | S=5 | W=1 | 
| |

| V | S=5 | W=1 | 
| |
1.2.3. Кинематические пары бывают в р а щ а т е л ь н ы е (см. рис. 1.5, 1.6), когда соединение образовано двумя цилиндрическими (или шаровыми) поверхностями, позволяющими двум звеньям вращаться друг относительно друга, и п о с т у п а т е л ь н ы е (см. рис. 1.7), когда звенья перемещаются между собой поступательно.
Дата добавления: 2020-10-01; просмотров: 230;
Поиск по сайту
Узнать еще
- II Классификация САSЕ-средств
- II. Классификация документов
- II.4. Классификация нефтей и газов по их химическим и физическим свойствам
- III. Классификация методов воспитания.
- III.1.3. ПРИЧИНЫ НАРУШЕНИЙ СЛУХА. ПСИХОЛОГО-ПЕДАГОГИЧЕСКАЯ КЛАССИФИКАЦИЯ НАРУШЕНИЙ СЛУХОВОЙ ФУНКЦИИ У ДЕТЕЙ
- III.2.3. ПРИЧИНЫ НАРУШЕНИЙ ЗРЕНИЯ. КЛАССИФИКАЦИЯ НАРУШЕНИЙ ЗРИТЕЛЬНОЙ ФУНКЦИИ У ДЕТЕЙ
- VI.2. Классификация месторождений нефти и газа
- VI.III. VI. Генетическая классификация складок.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
