Электропривод с синхронным и вентильно – индукторным двигателями
Конструкция статора синхронного двигателя (СД) принципиально не отличается от конструкции статора асинхронного двигателя. На нем располагается трёхфазная обмотка, которая питается от трёхфазного источника напряжения. Протекающие по ней токи создают вращающееся магнитное поле статора. Конструкция ротора синхронной машины существенно отличается от конструкции ротора асинхронного двигателя тем, что на роторе расположена однофазная обмотка возбуждения, которая питается от источника постоянного тока. Принципиальная схема включения синхронного двигателя представлена на рис. 5.11,а.
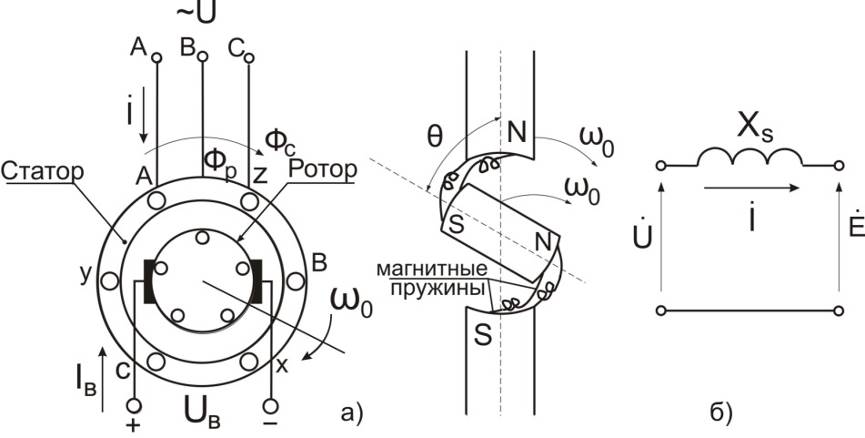
Рис. 5.11. Принцип действия (а) и схема замещения статорной цепи синхронного двигателя
Наличие постоянного тока возбуждения  приводит к возникновению собственного магнитного поля ротора, неподвижного относительно ротора. Это поле сцепляется с вращающимся полем статора и заставляет ротор вращаться с той же скоростью, что и поле статора («магнитная пружина»), отставая в двигательном режиме или опережая в генераторном (тормозном) режиме на угол
приводит к возникновению собственного магнитного поля ротора, неподвижного относительно ротора. Это поле сцепляется с вращающимся полем статора и заставляет ротор вращаться с той же скоростью, что и поле статора («магнитная пружина»), отставая в двигательном режиме или опережая в генераторном (тормозном) режиме на угол  , зависящий от электромагнитного момента (рис. 5.11,а). Поэтому скорость двигателя в установившемся режиме всегда равна синхронной скорости
, зависящий от электромагнитного момента (рис. 5.11,а). Поэтому скорость двигателя в установившемся режиме всегда равна синхронной скорости  , которая однозначно определяется значением частоты напряжения питания и числом пар полюсов обмотки статора, т.е. равна
, которая однозначно определяется значением частоты напряжения питания и числом пар полюсов обмотки статора, т.е. равна  .
.
Синхронные двигатели в зависимости от их конструктивного исполнения подразделяются на двигатели с явнополюсным и неявнополюсным роторами. В первом случае полюса ротора изготавливаются отдельно от заготовки ротора. На сердечники из электротехнической стали устанавливаются катушки обмотки возбуждения, и затем готовые полюса с катушками крепятся на роторе.
Во втором случае в листах электротехнической стали, из которых собирается магнитопровод ротора, предусматриваются радиальные вырезы. После сборки ротора на его поверхности образуются продольные пазы, в которые укладываются катушки обмотки возбуждения. Кроме того, на роторе укладывается специальная демпферная обмотка, наподобие пусковой беличьей клетки. Она необходима для осуществления пуска синхронного двигателя методом асинхронного пуска, а также для демпфирования качаний ротора при резкопеременной или пульсирующей нагрузке.
Различают также реактивные синхронные двигатели, у которых ротор выполнен как у явнополюсного СД, но без обмотки возбуждения. Широко в настоящее время применяются вентильные двигатели, это синхронная машина с постоянными магнитами, а также бесконтактные двигатели постоянного тока с электронными коммутаторами.
Фаза статора неявнополюсной синхронной машины (p=1), если пренебречь активным сопротивлением обмотки статора, может быть представлена схемой замещения на рис. 5.11,б. Уравнение равновесия такой цепи запишется в виде  , а векторная диаграмма представлена на рис. 5.12,а.
, а векторная диаграмма представлена на рис. 5.12,а.
Для синхронной машины очень важен угол между  и
и  , или, что то же между осью поля статора и осью ротора – он, как уже указывалось, характеризует степень растянутости «магнитной пружины».
, или, что то же между осью поля статора и осью ротора – он, как уже указывалось, характеризует степень растянутости «магнитной пружины».
Основные соотношения между электрическими и механическими величинами находим, воспользовавшись формулой
 (5.53)
(5.53)
и векторной диаграммой на рис. 5.12,а, из которой следует, что
 .
.
Рис. 5.12. Векторная диаграмма (а), угловая (б), механическая (в) характеристики и V-образные кривые синхронной машины (г)
Из вспомогательного треугольника АВС определим
и получим
 .
.
Окончательно имеем
 , (5.54)
, (5.54)
где  - максимальный момент синхронной машины.
- максимальный момент синхронной машины.
Угловая характеристика синхронной машины  представлена на рис. 5.12,б. Максимальный момент
представлена на рис. 5.12,б. Максимальный момент  при постоянном напряжении и частоте пропорционален ЭДС статора Е. Перегрузочная способность синхронной машины определяется
при постоянном напряжении и частоте пропорционален ЭДС статора Е. Перегрузочная способность синхронной машины определяется  , что при
, что при  ˚составляет
˚составляет  .
.
Если машина имеет явнополюсный ротор, то уравнение угловой характеристики запишется в виде
 , (5.55)
, (5.55)
где  ,
,  - индуктивные сопротивления рассеяния по продольной и поперечной осям.
- индуктивные сопротивления рассеяния по продольной и поперечной осям.
Второе слагаемое в (5.55) свидетельствует о дополнительном моменте (реактивном), обусловленным явнополюсным ротором. Из анализа (5.55) следует, что явнополюсной синхронный двигатель может развивать некоторый момент и без возбуждения. Это так называемый реактивный СД. Это объясняется тем, что магнитное поле статора стремится удержать вращающийся ротор в таком положении, когда магнитное сопротивление потоку минимально. На рис. 5.11 это будет соответствовать совпадению оси главных полюсов N-S с продольной осью ротора. Реактивный момент изменяется с двойной частотой (штриховая линия 5.12,б) и смещает в сторону меньших значений  максимальный момент явнополюсного СД.
максимальный момент явнополюсного СД.
Синхронная машина имеет характерные зависимости тока статора I от тока возбуждения  - это так называемые V-образные кривые (рис. 5.12,е). Их форма связана с тем, что при изменении тока возбуждения меняются реактивная составляющая тока статора и её знак. Это позволяет использовать СД как управляемый компенсатор реактивной мощности.
- это так называемые V-образные кривые (рис. 5.12,е). Их форма связана с тем, что при изменении тока возбуждения меняются реактивная составляющая тока статора и её знак. Это позволяет использовать СД как управляемый компенсатор реактивной мощности.
Механическая характеристика синхронного двигателя  является абсолютно жёсткой характеристикой (рис. 5.12,в), что и предопределило его применение в нерегулируемых электроприводах. В настоящее время, в связи с появлением частотных преобразователей от маломощных до мощных силовых преобразователей с современными методами цифрового управления в корне изменилась ситуация и синхронный ЭП занял ведущие позиции в станкостроении, робототехнике, металлургии и т.п.
является абсолютно жёсткой характеристикой (рис. 5.12,в), что и предопределило его применение в нерегулируемых электроприводах. В настоящее время, в связи с появлением частотных преобразователей от маломощных до мощных силовых преобразователей с современными методами цифрового управления в корне изменилась ситуация и синхронный ЭП занял ведущие позиции в станкостроении, робототехнике, металлургии и т.п.
Особое место в ряду множества новых электроприводов, обязанных своим появлением успехам электронной техники, занимает дискретный электропривод, осуществляющий преобразование электрического сигнала (кода, цифры) в дозированное угловое или линейное перемещение (шаговые двигатели), а также силовая версия этого электропривода – вентильно – индукторный электропривод ВИД, получивший в 90-е годы прошлого столетия интенсивное развитие.
В отличие от асинхронных и синхронных двигателей, в ВИД электромагнитный момент создаётся не в результате взаимодействия вращающегося магнитного поля статора с токами ротора (в АД), а за счёт несимметричности магнитной системы. Принцип действия ВИД на примере четырёхфазной машины поясняет рис. 5.13. На каждом из двух находящихся друг против друга полюсов явнополюсного статора располагаются катушки, соединённые последовательно и согласно. Две парные катушки образуют фазные обмотки А1-А2, В1-В2, С1-С2, и D1-D2. Они получают питание от источника постоянного тока (рис. 5.13) с напряжением  через вентильный силовой коммутатор (1), каждая фаза которого обеспечивает протекание тока через катушку от плюса к минусу источника. Ротор зубчатый, обмотки на роторе нет. Характерной особенностью ВИД является то, что число зубцов его ротора не равно числу полюсов статора.
через вентильный силовой коммутатор (1), каждая фаза которого обеспечивает протекание тока через катушку от плюса к минусу источника. Ротор зубчатый, обмотки на роторе нет. Характерной особенностью ВИД является то, что число зубцов его ротора не равно числу полюсов статора.
Число полюсов статора определяется выражением  ,
,
где  - целое число,
- целое число,  – число фаз.
– число фаз.
Число полюсов (зубцов) ротора  не может выбираться произвольно и определяется в соответствии с формулой
не может выбираться произвольно и определяется в соответствии с формулой
 ,
,
где  - целое число.
- целое число.
В двигателе, показанном на рис. 5.13, число фаз равно 4, коэффициент , также как и  , принят равным 1, в результате чего число полюсов статора равно 8. Число зубцов ротора в зависимости от выбранного знака в формуле для может быть 6 (см. рис. 5.13) либо 10.
, принят равным 1, в результате чего число полюсов статора равно 8. Число зубцов ротора в зависимости от выбранного знака в формуле для может быть 6 (см. рис. 5.13) либо 10.
На рис. 5.13 показано положение ротора, при котором ток от источника протекает через транзисторные ключи VT3, VT4 фазы В коммутатора и обмотки В1 и В2 полюсов статора, а ось ротора совпадает с осью этих обмоток. Другие фазы статора током не обтекаются. Магнитные силовые линии замыкаются через два полюса статора, обмотки которых в данный момент обтекаются током, два зубца и тело ротора и далее через ярмо магнитной системы статора. Если теперь закрыть транзисторные фазы В и открыть транзисторы VT1, VT2 фазы А, то током будут обтекаться обмотки А1 и А2, что соответствует повороту вектора потока статора на 45˚ по часовой стрелке. Ротор под действием поля статора будет поворачиваться до совпадения оси ближайшей пары зубцов ротора с осью обмотки А1 и А2. Эта пара зубцов ротора на рисунке помечена точками. Ротор повернётся на 15˚ в сторону, противоположную направлению поворота вектора магнитного поля статора.
Если после фазы В открыть транзисторы фазы С, то вектор магнитного поля статора повернётся против часовой стрелки на 45˚, а ротор по часовой стрелке на угол 15˚. Таким образом ВИД обладает электромагнитной редукцией, т.е. скорости поля статора и ротора не равны. В рассматриваемом случае коэффициент редукции  .
.
| Рис. 5.13 Структура вентильно – индукторного электропривода: 1 - силовой коммутатор, 2 – двигатель, 3 – датчик положения ротора, 4 - система управления, 5 - выпрямитель |
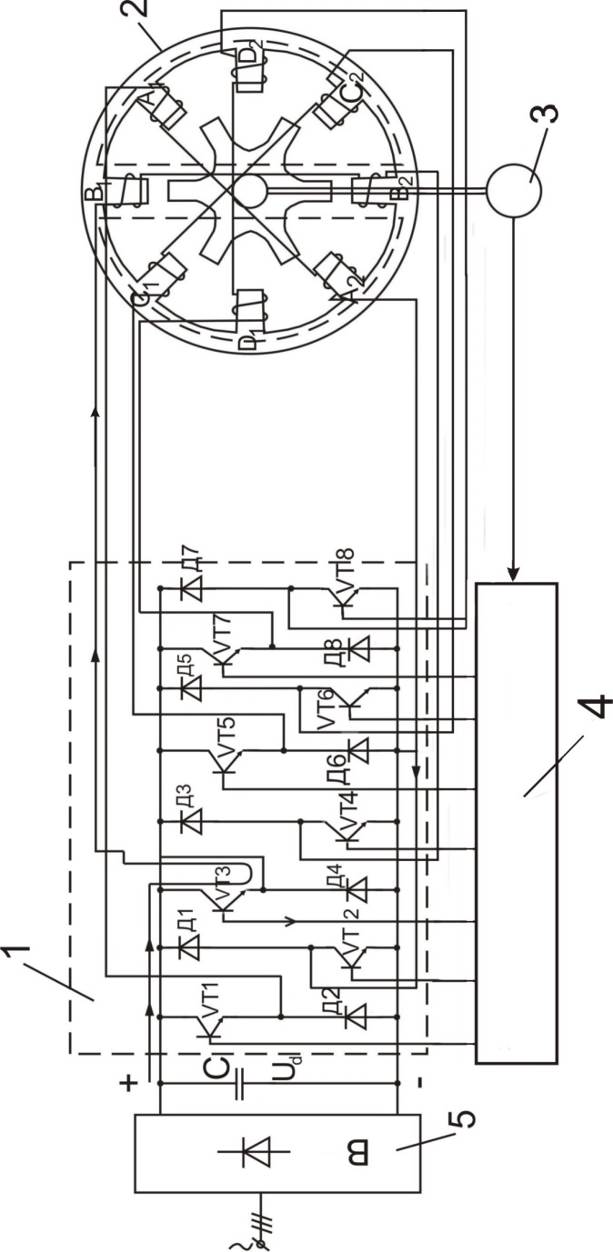
Для того, чтобы ротор двигателя совершал непрерывное вращение, необходимо последовательно подключить к источнику питания обмотку смежных полюсов статора по специальному алгоритму с использованием датчика положения ротора ДПР.
Основные достоинства вентильно – индукторного привода : простота конструкции двигателя, что определяет низкую стоимость по сравнению с асинхронным двигателем с короткозамкнутым ротором; простота преобразователя, от которого питается двигатель, представляющий собой силовой вентильный коммутатор с односторонней проводимостью тока.
Дата добавления: 2019-02-08; просмотров: 1200;
Поиск по сайту
Узнать еще
- Алгоритм моделирования системы электропривода по методу структурных схем
- Алгоритм моделирования системы электропривода по методу уравнений состояния
- Анализ результатов функционального синтеза системы электропривода
- Аналитический метод исследования переходных процессов электропривода на базе математической модели двигателя постоянного тока
- Асинхронные электродвигатели с фазным ротором в крановых электроприводах
- Асинхронный двигатель для параметрического электропривода
- Асинхронный электропривод на основе ПЧ с АИН и управляемым выпрямителем
- Асинхронный электропривод на основе ПЧ с АИН с широтно-импульсной модуляцией

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
