Функция положения и ее производные
Рассмотрим рис. 3.5, на котором изображен механизм шарнирного четырехзвенника, состоящий из начального звена 1, структурной группы второго класса первого вида BCD и стойки 4. Обобщенной координатой механизма является угол  . Различают функцию положения звена и функцию положения точки. Функцией положения звена называется зависимость вида
. Различают функцию положения звена и функцию положения точки. Функцией положения звена называется зависимость вида  , заданная аналитически, графически или в табличной форме. Функцию положения точки представим в проекциях на оси координат:
, заданная аналитически, графически или в табличной форме. Функцию положения точки представим в проекциях на оси координат:
 ;
;  . (3.76)
. (3.76)
Дважды продифференцируем функцию положения звена по времени.
Поскольку сама обобщенная координата является функцией времени, то получим:
 ;
;  . (3.77)
. (3.77)
Производная от функции положения звена по обобщенной координате называется первой передаточной функцией, или аналогом угловой скорости (безразмерная величина). Вторая производная от функций положений по обобщенной координате называется второй передаточной функцией, или аналогом углового ускорения (безразмерная величина). В (3.74)  и
и  – обобщенные угловая скорость и угловое ускорение. Продифференцируем функцию положения точки:
– обобщенные угловая скорость и угловое ускорение. Продифференцируем функцию положения точки:
 ;
;  ; (3.78)
; (3.78)
 ;
;  .
.
В (3.78) первые и вторые производные от координат точки по обобщенной координате называются проекциями аналогов скоростей и ускорений точки (в системе СИ размерность в метрах). Если принять обобщенную  (безразмерная величина) и
(безразмерная величина) и  , то из выражений (3.77) и (3.78) видно, что истинные скорости и ускорения будут совпадать с их аналогами.
, то из выражений (3.77) и (3.78) видно, что истинные скорости и ускорения будут совпадать с их аналогами.
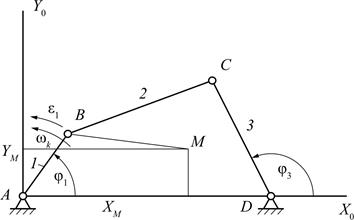
Рис. 3.5. К определению понятия функции
положения точки и звена
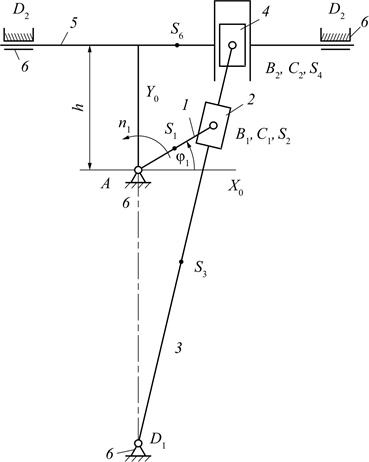
Рис. 3.6. Механизм строгального станка
3.6.1. Пример кинематического расчета механизма
строгального станка
Проведем кинематический расчет механизма строгального станка (рис. 3.6). Механизм состоит из начального звена, структурной группы 23 и группы 25.
Угловую скорость начального звена примем равной единице (безразмерная величина), угловое ускорение примем равным нулю.
Исходные данные: 
 ;
;  ;
;  ;
;  ;
;  ;
;  .
.
Центр масс второго звена S2 совпадает с точкой B1, центр масс четвертого звена S4 – с точкой B2.
1. Расчет начального звена.
Таблица 3.9
Исходные данные (рис. 3.7)
| Тип звена | |||||||
| l | a | α | XA | YA | ω | ε |
Расчетные формулы:
 ;
; 
 ;
;  . (3.79)
. (3.79)
 ;
;  .
.
Изменяя обобщенную координату от 0 до 360° с шагом, равным 30°, сведем выходные параметры начального звена в таблицу.
Таблица 3.10
Выходные параметры начального звена
| № п/п | ||||||

| XH | YH | XH1 | YH1 | XH2 | YH2 |
2. Кинематика группы 23.
Решение задачи о положениях. Из схемы группы (рис. 3.8) видно, что кинематическая пара В получает вход от начального звена, то есть  ;
;  (первый и второй столбцы табл. 3.10). Кинематическая пара D получает вход от стойки, то есть
(первый и второй столбцы табл. 3.10). Кинематическая пара D получает вход от стойки, то есть  ;
;  =….
=….

Рис. 3.7. К расчету начального звена
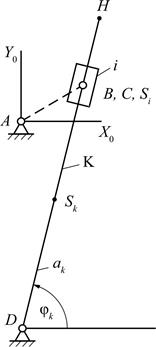
Рис. 3.8. К расчету группы 23
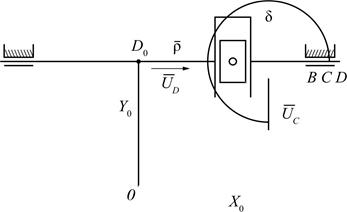
Рис. 3.9. К расчету группы 25
Расчётные формулы:

 ,
,
 ,
,  .
.
3. Кинематика групп 23.
Решение задачи о скоростях. Входы в группу при решении задачи о скоростях:
 ;
;
 (третий и четвертый столбцы таблицы 3.10);
(третий и четвертый столбцы таблицы 3.10);
 ;
;  .
.
Расчетные формулы:
 ;
;  ;
;  ;
;  ;
;
 ;
;  ;
;  ;
;
 ;
;  ;
;
 ;
;  .
.
4. Кинематика группы 23.
Решение задач об ускорениях. Входы в группу при решении задачи об ускорениях:
 ;
;
 (пятый и шестой столбцы таблицы 3.10);
(пятый и шестой столбцы таблицы 3.10);


Расчетные формулы для свободных членов системы уравнений с двумя неизвестными  и
и  :
:
 ;
;
 .
.
Коэффициенты при неизвестных  ,
,  ,
,  ,
,  останутся те же, что и в задаче о скоростях (табл. 3.9, 3.10), Определитель
останутся те же, что и в задаче о скоростях (табл. 3.9, 3.10), Определитель  тоже сохранит своё значение. Тогда неизвестные найдём из выражений:
тоже сохранит своё значение. Тогда неизвестные найдём из выражений:
 ;
;  ;
;
 ;
;  .
.
5. Кинематика группы 25.
Выберем координаты точкиD0 (рис. 3.9):
 ;
;  .
.
Направим вектор  вправо, его проекции на оси X0 Y0:
вправо, его проекции на оси X0 Y0:
 ;
;  .
.
Угол  между векторами ,
между векторами ,  и будет равен270°.
и будет равен270°.
Поэтому проекции вектора /  ;
;  .
.
Уравнение замкнутости контура D0DB в проекциях на оси примет вид:

(3.80)
Дифференцируем (7.80) первый раз:
 ;
;
(3.81)
 .
.
Повторное дифференцирование дает:
 ;
;
(3.82)

Таким образом, решение задач кинематики группы 25 свелось к нахождению координаты точкиB0 и первых и вторых производных. Эти параметры найдем, применяя вспомогательную задачу первого типа к звену Крассчитанной группы 23 при следующих данных:
 ;
;  ;
;  ;
;  ;
;  ;
;
 ;
;  .
.
Расчетные формулы:
 =
=  ;
;  =
=  ;
;
 ;
;  .
.
Проекции скоростей точки Н:
 ;
;  ;
;
где 1=  ; 1=
; 1=  .
.
Проекции ускорений точки Н:
 ;
;  ;
;
¨ где  ;
;  .
.
Координаты XH, YH их первые и вторые производные будут являться входами в группу 25, то есть:
 ;
;  ;
;  ;
;
 ;
;  ;
;  .
.
Дата добавления: 2020-07-18; просмотров: 363;
Поиск по сайту
Узнать еще
- F52 Половая дисфункция, не обусловленная органическим расстройством или заболеванием
- II. Основные положения
- II. Отклонения расположения поверхностей
- III. Суммарные допуски формы расположения
- Азотистые т основания- производные пиримидина
- Альдегиды и их производные
- Анаболизм - функция фитоценоза в экосистеме
- Анатомия и физиология — науки о строении и функциях организма.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
