Тяговые расчеты машин для земляных работ.
Тяговый расчет включает в себя определение основных параметров силовой установки, обеспечивающих требуемые тяговые характеристики, тягового усилия, максимальных рабочих и транспортных сопротивлений, мощности и крутящего момента двигателя и др. Исходными данными при расчете являются: требования к машине и рабочим органам со стороны технологического процесса, параметры рабочего органа, тип движителя, коэффициенты сопротивлений, скорости движения и др. Может быть решена и обратная задача: по заданным тяговым характеристикам определить скорости движения и другие параметры рабочего оборудования.
Тяговое усилие (окружную силу) Т, которое должно развиваться движителем определяют по сопротивлениям, возникающим в рабочем и транспортном режимах движения машины. Сопротивлением воздуха в рабочем режиме движения МЗР пренебрегают.
Для тягового режима уравнения силового баланса имеет вид:
 ; (4.14)
; (4.14)
где  - сила сопротивления движению, Pf=Gм·f (f- коэффициент сопротивления движению (табл. 4.2), Gм- сила тяжести машины], P01- горизонтальная составляющая силы сопротивления грунта копанию (методы ее определения рассмотрены в соответствующих разделах); Ру – сила сопротивления, обусловленная движением машины на уклоне;
- сила сопротивления движению, Pf=Gм·f (f- коэффициент сопротивления движению (табл. 4.2), Gм- сила тяжести машины], P01- горизонтальная составляющая силы сопротивления грунта копанию (методы ее определения рассмотрены в соответствующих разделах); Ру – сила сопротивления, обусловленная движением машины на уклоне;
 ; (4.15)
; (4.15)
где α- угол наклона поверхности движения к горизонту (при малых α можно полагать, что sinα≈ tgα); i= tgα=  - уклон местности, который измеряется как отношение высоты подъема h к его протяженности (заложению), измеренной по горизонтали; Pи- сопротивление от преодоления сил инерции при неравномерном поступательном движении, Ри=
- уклон местности, который измеряется как отношение высоты подъема h к его протяженности (заложению), измеренной по горизонтали; Pи- сопротивление от преодоления сил инерции при неравномерном поступательном движении, Ри=  , (Ки- коэффициент учета инерции вращающихся масс механизмов привода движителя, для гусеничных машин Ки= 1,05÷1,1, для колесных машин Ки=1,2÷1,3); g – ускорение свободного падения, g=9,81 м/с2, j-ускорение, м/с2, j=
, (Ки- коэффициент учета инерции вращающихся масс механизмов привода движителя, для гусеничных машин Ки= 1,05÷1,1, для колесных машин Ки=1,2÷1,3); g – ускорение свободного падения, g=9,81 м/с2, j-ускорение, м/с2, j=  (J –скорость машины после разгона, м/с; tр- время разгона, tр=2÷5 с).
(J –скорость машины после разгона, м/с; tр- время разгона, tр=2÷5 с).
В транспортном режиме уравнения столового баланса имеет вид:
 ; (4.16)
; (4.16)
где Pв- сила сопротивления воздуха движению машины (Рв=  ), Кw – приведенный коэффициент сопротивления воздуха (коэффициент обтекаемости), Кw=0,06-0,07 Н·с2/м4; F – площадь лобового сопротивления машины, которая определяется как проекция машины на плоскость, перпендикулярную направлению движения; J- действительная скорость движения машины (Jд=0,377
), Кw – приведенный коэффициент сопротивления воздуха (коэффициент обтекаемости), Кw=0,06-0,07 Н·с2/м4; F – площадь лобового сопротивления машины, которая определяется как проекция машины на плоскость, перпендикулярную направлению движения; J- действительная скорость движения машины (Jд=0,377  км/ч ); rс- силовой радиус колеса; nе – число оборотов коленчатого вала двигателя, об/мин, iм – передаточное число трансмиссии, δк – коэффициент буксования, %.
км/ч ); rс- силовой радиус колеса; nе – число оборотов коленчатого вала двигателя, об/мин, iм – передаточное число трансмиссии, δк – коэффициент буксования, %.
Наиболее полно тяговые качества пневмоколесных МЗР оцениваются тяговыми характеристиками, которые в графической форме выражают зависимость коэффициента буксования δк, действительной скорости движения Jд, часового расхода топлива Gт, тяговой мощности Nт, тягового КПД ηт, удельного расхода топлива gт от силы тяги Т при ее изменении от нулевого до максимального значения, обуславливаемого условиями сцепления шин с опорной поверхностью или мощностью двигателя.
При работе землеройно-транспортных машин часть мощности двигателя отбирается на привод вспомогательных механизмов и агрегатов.
В результате отбора на привод колесного движителя идет только часть мощности двигателя. Это сказывается на тяговых качествах машин и является наиболее общим случаем при построении тяговых характеристик.
Для расчета и построения тяговой характеристики требуются следующие данные: регуляторная характеристика двигателя или выходная характеристика привода – двигатель внутреннего сгорания – гидродинамическая передача, общие передаточные числа трансмиссии на разных передачах и КПД механической трансмиссии, нормальные реакции грунта на ведущие и ведомые колеса машины, колесная схема и размер пневматических шин, вид и состояние грунтовой поверхности.
Расчет и построение характеристик, определяющих тяговые свойства пневмоколесных МЗР выполняются в такой последовательности.
Табл. 4.3. Значения коэффициентов А, В, n для колесного движителя на связных грунтах
| Состояние грунта | Относительная влажность грунта | Давление воздуха в пневматической шине, МПа | ||||||||||||||
| 0,1 | 0,2 | 0,3 | 0,4 | 0,5 | ||||||||||||
| w/w0 | A | B | n | A | B | n | A | B | n | A | B | n | A | B | n | |
| Рыхлый (насыпной) | 0,67 1,00 1,17 1,33 | 0,11 0,12 0,13 0,14 | 2,79 2,97 2,73 2,53 | 0,11 0,12 0,13 0,14 | 5,15 6,58 6,29 6,68 | 0,11 0,12 0,13 0,14 | 7,82 11,13 10,06 11,72 | 0,11 0,12 0,13 0,14 | 10,24 14,74 14,15 19,14 | 0,11 0,12 0,13 0,14 | 12,31 18,10 18,88 24,96 | |||||
| Плотный (свежесрезан ный) | 0,67 1,00 1,17 1,33 | 0,09 0,10 0,12 0,15 | 1,50 2,31 2,56 2,81 | 0,09 0,10 0,12 0,15 | 2,34 5,48 7,76 10,03 | 0,09 0,10 0,12 0,15 | 2,81 9,25 14,79 27,35 | 0,09 0,10 0,12 0,15 | 3,38 14,40 24,47 70,82 | 0,09 0,10 0,12 0,15 | 3,73 18,10 42,18 210,28 |
Здесь: w –весовая влажность грунта, w0- оптимальная влажность грунта, определенная методом стандартного уплотнения.
1. Во втором квадранте (рис. 4.6) размещаем регуляторную характеристику двигателя, представленную в функции крутящего момента Ме.
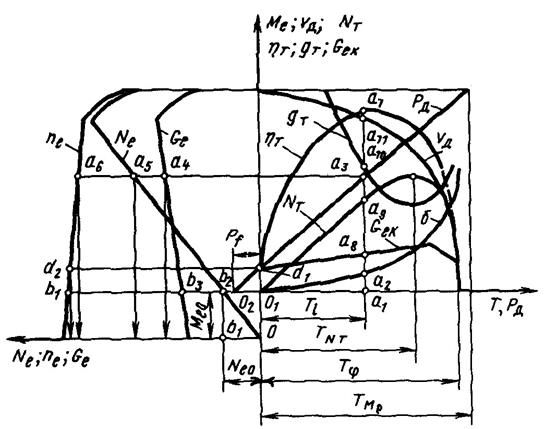
Рис. 4.6 Тяговая характеристика МЗР.
2. По оси абсцисс влево от начала координат (точка 0) графика регуляторной характеристики двигателя откладываем значение мощности двигателя, расходуемой на привод вспомогательных механизмов машины Nео. Через полученную точку b1 проводим вертикаль до пересечения с кривой Nе, а затем через точку b2- горизонталь так, чтобы она пересекла кривые частоты вращения nе, часового расхода топлива Gе и ось ординат. После этого определяем крутящий момент двигателя Мео, расходуемый на привод механизмов машины, а проектируя точки b3 и b1 на ось абсцисс, по соответствующим шкалам устанавливаем часовой расход топлива, который идет на привод механизмов, и частоту вращения коленчатого вала nео при условии, если двигатель развивает мощность Nео.
3. Рассматривая точку O1 как начало координат силы тяги, строим кривую коэффициента буксования δк в функции силы тяги машины Т по сцеплению, используя зависимость:
δк=  ; (4.17)
; (4.17)
4. Подсчитываем силу сопротивления качению колес машины  =Gм·f и откладываем найденное значение Pf влево от точки О1. Полученная точка О2 будет началом окружной силы колесного движителя машины.
=Gм·f и откладываем найденное значение Pf влево от точки О1. Полученная точка О2 будет началом окружной силы колесного движителя машины.
5. В первом квадранте для каждой передачи строим график, устанавливающий зависимость крутящего момента Ме двигателя с использованием формулы (4.10), здесь луч РД другие кривые тяговой характеристики будут построены только для одной передачи.
6. Строим кривую действительной скорости действительной скорости Jд= 0,377  . Для определения ne при работе машины с отбором мощности Neo и при Т=0 необходимо провести через точку d1 горизонталь до пересечения с кривой ne, а затем полученную точку d2 спроектировать на ось абсцисс. После этого можно определить по шкале ne частоту вращения коленчатого вала двигателя и подсчитать для него при δк=0 максимальное значение действительной скорости МЗР.
. Для определения ne при работе машины с отбором мощности Neo и при Т=0 необходимо провести через точку d1 горизонталь до пересечения с кривой ne, а затем полученную точку d2 спроектировать на ось абсцисс. После этого можно определить по шкале ne частоту вращения коленчатого вала двигателя и подсчитать для него при δк=0 максимальное значение действительной скорости МЗР.
7. Строим кривую часового расхода топлива GТ в функции силы тяги Т. Проектируя точку a4 на ось абсцисс, по соответствующей шкале устанавливаем полный расход топлива GТi двигателем, состоящий из расхода на привод вспомогательных механизмов Geo и колесного движителя машины Geki. При силе тяги Тi:
Geki= GТi─ Geo (4.18)
Найденное значение Geki отложено в первом квадранте (отрезок a1, a8).
8. Производные зависимостей тяговой характеристики Nт=Nт(Т) и gТ= gТ(Т) строят, как и в предыдущих случаях, по точкам путем подстановки соответствующих значений Т и Jд в формулу
NТ=Т ·Jд, а также значений Gek и NТ в формулу gТ=  значения NТi и gТi, соответствующие режиму работы МЗР Тi при отборе мощности двигателя на привод механизмов, обозначены отрезками a1a9 и a1a10.
значения NТi и gТi, соответствующие режиму работы МЗР Тi при отборе мощности двигателя на привод механизмов, обозначены отрезками a1a9 и a1a10.
Кривую зависимости тягового КПД ηт от силы тяги Т строим по точкам по формуле ηТ=  .
.
Значение NТi при работе МЗР на режиме Тi находим по размеру отрезка a1a9 с учетом масштаба шкалы тяговой мощности. Соответствующую мощность двигателя находим прежним приемом, проектируя точку a5 на шкалу Ne. Найденное значение ηТi обозначено отрезком a1a7.
С помощью тяговой характеристики можно выявить технико-экономические качества машины воспользовавшись следующими показателями, устанавливаемыми для каждой передачи привода хода при различных значениях силы тяги: тяговой мощностью NТ, коэффициентом буксования δк, действительной скоростью движения Jд, тяговым КПД ηТ, часовым GТ и удельным gТ расходом топлива, а также запасом силы тяги, определяющим способность для землеройных машин преодолевать повышенные сопротивления грунта копанию без перехода на пониженную передачу.
Последний показатель находят как разность между максимальной силой тяги, определяемой условиями сцепления колесного движителя с поверхностью качения Тj, и силой тяги Т при данном режиме работы машины. Кроме этого можно определить следующие характерные значения силы тяги (рис. 4.6): силу ТNe тяги при максимальной мощности, силу тяги ТNТ при максимальной тяговой мощности, номинальную силу тяги Тн при буксовании колесного движителя δк=20%, силу тяги Тη – соответствующую максимальному значению тягового КПД при δк=10%, наибольшую допустимую силу тяги Тдmax при кратковременной работе, соответствующую буксованию колесного движителя δк=30%.
5 ОДНОКОВШОВЫЕ ЭКСКАВАТОРЫ.
Дата добавления: 2016-06-29; просмотров: 4581;
Поиск по сайту
Узнать еще
- A ... метка (без метки) на шатуне (стрелка) для 26.20b Измерение внутреннего диаметра
- Andante cantabile con espressione В. Моцарт. Соната для ф-п. № 8, ч. II
- Andantino con moto А. Бородин. Для берегов отчизны дальней
- Audit Trail - Материалы для проведения аудиторской проверки
- I. Установка для исследования сдвига фаз колебаний силы тока и напряжения с помощью компьютера и осциллографа-приставки
- I.10. Тесты для контроля знаний
- II. Принцип действия и режимы работы синхронной машины
- II. Физический и моральный износ машин.

Публикации по технике и механике

Публикации по биологии

Публикации по информатике

Публикации по строительству

Публикации по физике

Публикации по химии

Публикации по электронике

Публикации по искусству

Публикации по истории
